
WordsEye: An Automatic Text-to-Scene Conversion System
Bob Coyne Richard Sproat
AT&T Labs — Research
Abstract
Natural language is an easy and effective medium for describing
visual ideas and mental images. Thus, we foresee the emergence of
language-based 3D scene generation systems to let ordinary users
quickly create 3D scenes without having to learn special software,
acquire artistic skills, or even touch a desktop window-oriented
interface. WordsEye is such a system for automatically convert-
ing text into representative 3D scenes. WordsEye relies on a large
database of 3D models and poses to depict entities and actions. Ev-
ery 3D model can have associated shape displacements, spatialtags,
and functional properties to be used in the depiction process. We
describe the linguistic analysis and depiction techniques used by
WordsEye along with some general strategies by which more ab-
stract concepts are made depictable.
CR Categories: H.5.1 [Information Interfaces and Presentation]:
Multimedia Information Systems—Artificial Realities H.5.2 [Infor-
mation Interfaces and Presentation]: User Interfaces—Input De-
vices and Strategies I.2.7 [Artificial Intelligence]: Natural Lan-
guage Processing—Language Parsing and Understanding I.3.6
[Graphics]: Methodologies—Interaction Techniques I.3.8 [Graph-
ics]: Applications
Keywords: Applications, HCI (Human-Computer Interface),
Multimedia,Text-to-Scene Conversion, Scene Generation
1 Introduction
Creating 3D graphics is a difficult and time-consuming process.
The user must learn a complex software package, traverse pages
of menus, change tools, tweak parameters, save files, and so on.
And then there’s the task of actually creating the artwork. We see
the need for a new paradigm in which the creation of 3D graphics is
both effortless and immediate. It should be possible to describe 3D
scenes directly through language, without going through the bottle-
neck of menu-based interfaces. Creating a 3D scene would then be
as easy as dashing off an instant message.
Natural language input has been investigated in a number of 3D
graphics systems including an early system by [2] and the oft-cited
Put system [8]; the Put system shared our goal of making graphics
creation easier, but was limited to spatial arrangements of existing
objects. Also, input was restricted to an artificial subset of English
consisting of expressions of the form Put (X P Y)
, where X and
Y are objects, and P is a spatial preposition. The system did al-
low for fairly sophisticated interpretation of spatial relations so that
on in on the table and on the wall would both be appropriately in-
terpreted. More recently, there has been work at the University of
Pennsylvania’s Center for Human Modeling and Simulation [3, 4],
where language is used to control animated characters in a closed
virtual environment. In previous systems the referenced objects and
actions are typically limited to what is available and applicable in
the pre-existing environment. These systems therefore have a nat-
ural affinity to the SHRDLU system [23] which, although it did
not have a graphics component, did use natural language to interact
with a “robot” living in a closed virtual world.
coyne,rws @research.att.com
Figure 1: John uses the crossbow. He rides the horse by the store.
The store is under the large willow. The small allosaurus is in front
of the horse. The dinosaur faces John. A gigantic teacup is in front
of the store. The dinosaur is in front of the horse. The gigantic
mushroom is in the teacup. The castle is to the right of the store.
The goal of WordsEye, in contrast, is to provide a blank slate
where the user can literally paint a picture with words, where the
description may consist not only of spatial relations, but also ac-
tions performed by objects in the scene. The text can include a
wide range of input. We have also deliberately chosen to address
the generation of static scenes rather than the control or genera-
tion of animation. This affords us the opportunity to focus on the
key issues of semantics and graphical representation without hav-
ing to address all the problems inherent in automatically generating
convincing animation. The expressive power of natural language
enables quite complex scenes to be generated with a level of spon-
taneity and fun unachievable by other methods (see Figure 1); there
is a certain magic in seeing one’s words turned into pictures.
WordsEye works as follows. An input text is entered, the sen-
tences are tagged and parsed, the output of the parser is then con-
verted to a dependency structure, and this dependency structure is
then semantically interpreted and converted into a semantic repre-
sentation. Depiction rules are used to convert the semantic repre-
sentation to a set of low-level depictors representing 3D objects,
poses, spatial relations, color attributes, etc; note that a pose can
be loosely defined as a character in a configuration suggestive of
a particular action. Transduction rules are applied to resolve con-
flicts and add implicit constraints. The resulting depictors are then
used to manipulate the 3D objects that constitute the final, render-
able 3D scene. For instance, for a short text such as: John said that
the cat was on the table. The animal was next to a bowl of apples,
WordsEye would construct a picture of a human character with a
cartoon speech bubble coming out of its mouth. In that speech bub-
ble would be a picture of a cat on a table with a bowl of apples next
to it.
1
1
With the exception of the initial tagging and parsing portion of the lin-
guistic analysis, WordsEye is implemented in Common Lisp, runs within

John said that the cat on the tablewas
Figure 2: Dependency structure for John said that the cat was on
the table..
Since linguistic descriptions tend to be at a high level of abstrac-
tion, there will be a certain amount of unpredictability in the graph-
ical result. This same tradeoff is seen in computational models of
behavior [21, 12] and natural phenomena. We also acknowledge
up front that it is infeasible to fully capture the semantic content of
language in graphics. But we do believe that a large number of in-
teresting 3D scenes can be described and generateddirectly through
language, and likewise that a wide variety of text can be effectively
depicted.
In the remainder of this paper, we describe each of the com-
ponents of WordsEye, starting with an overview of the linguistic
analysis techniques used.
2 Linguistic Analysis
The text is initially tagged and parsed using a part-of speech-tagger
[7] and a statistical parser [9]. The output of this process is a parse
tree that represents the structure of the sentence. Note that since the
parser is statistical, it will attempt to resolve ambiguities, such as
prepositional phrase attachments, according to the statistics of the
corpus on which it was trained (the Penn Treebank [19]). The parse
tree is then converted into a dependency representation (see [16],
inter alia) which is simply a list of the words in the sentence, show-
ing the words that they are dependent on (the heads) and the words
that are dependent on them (the dependents). Figure 2 shows an
example dependency structure, with arrows pointing from heads to
their dependents. The reason for performing this conversion from
parse tree to dependency structure is that the dependency represen-
tation is more convenient for semantic analysis. For example, if we
wish to depict the large naughty black cat we might actually have
no way of depicting naughty, but we still would like to depict large
and black. To do this we need merely to look at cat’s dependents
for depictable adjectives, which is in general simpler than hunting
for depictable modifiers in a tree structure headed by cat.
The next phase of the analysis involves converting the depen-
dency structure into a semantic representation. The semantic repre-
sentation is a description of the entities to be depicted in the scene,
and the relationships between them. The semantic representation
for the sentence John said that the cat is on the table is given in
Figure 3. The semantic representation is a list of semantic repre-
sentation fragments, each fragment corresponding to a particular
node of the dependency structure. Consider “node1”, which is the
semantic representation fragment for the action say, deriving from
the node say in the dependency structure. The subject is “node2”
(corresponding to John), and the direct object is the collection of
“node5”, “node4” and “node7”, corresponding to nodes associated
with the subordinate clause that the cat was on the table. Each
of these nodes in turn correspond to particular nodes in the depen-
dency structure, and will eventually in turn be depicted by a given
3D object: so John will be depicted (in the current system) by a
humanoid figure we call “Mr. Happy”, and table will be depicted
by one of a set of available 3D table objects.
2
the Mirai 3D animation system from IZware, and uses 3D models from
Viewpoint.
2
An individual semantic representation fragment as currently used in
WordsEye may seem relatively simple when compared, say, with the PAR
(("node2" (:ENTITY :3D-OBJECTS ("mr_happy")
:LEXICAL-SOURCE "John" :SOURCE SELF))
("node1" (:ACTION "say" :SUBJECT "node2"
:DIRECT-OBJECT ("node5" "node4" "node7")...))
("node5" (:ENTITY :3D-OBJECTS ("cat-vp2842")))
("node4" (:STATIVE-RELATION "on" :FIGURE "node5"
:GROUND "node7"))
("node7" (:ENTITY :3D-OBJECTS
("table-vp14364" "nightstand-vp21374"
"table-vp4098" "pool_table-vp8359" ...))))
Figure 3: Semantic representation for John said that the cat was on
the table.
Semantic representation fragments are derived from the depen-
dency structure by semantic interpretation frames. The appropriate
semantic interpretation frames are found by table lookup, given the
word in question. These frames differ depending upon what kind
of thing the word denotes. For nouns such as cat or table, Words-
Eye uses WordNet [10], which provides various kinds of semantic
relations between words, the particular information of interest here
being the hypernym and hyponym relations. The 3D objects are
keyed into the WordNet database so that a particular model of a cat,
for example, can be referenced as cat, or feline or mammal, etc.
Personal names such as John or Mary are mapped appropriately
to male or female humanoid figures. Spatial prepositions such as
on are handled by semantic functions that look at the left and right
dependents of the preposition and construct a semantic representa-
tion fragment depending upon their properties. Note that there has
been a substantial amount of previous work into the semantics of
spatial prepositions; see, inter alia, [5, 14, 15] and the collections
in [11, 20]; there has also been a great deal of interesting cross-
linguistic work, as exemplified by [22]. There have been only a
small number of implementations of these ideas however; one so-
phisticated instance is [24]. One important conclusion of much of
this research is that the interpretation of spatial relations is often
quite object-dependent, and relates as much to the function of the
object as its geometric properties, a point that ties in well with our
use of spatial tags, introduced below in Section 3.1.
Finally, most verbs are handled by semantic frames, which are
informed by recent work on verbal semantics, including [18]. The
semantic entry for say is shown in Figure 4. This semantic entry
contains a set of verb frames, each of which defines the argument
structure of one “sense” of the verb say. For example, the first
verb frame, named the SAY-BELIEVE-THAT-S-FRAME, has as
required arguments a subject and a THAT-S-OBJECT, or in other
words an expression such as that the cat is on the table. Optional
arguments include action location (e.g., John said in the bathroom
that the cat was on the table) and action time (e.g., John said yes-
terday that the cat was on the table.) Each of these argument spec-
ifications causes a function to be invoked to check the dependen-
cies of the verb for a dependent with a given property, and assigns
such a dependent to a particular slot in the semantic representation
fragment. WordsEye currently has semantic entries for about 1300
English nouns (corresponding to the 1300 objects described in Sec-
tion 3.1), and about 2300 verbs, in addition to a few depictable ad-
jectives, and most prepositions. The vocabulary is, however, readily
extensible and is limited only by what we are able to depict.
In addition to semantically interpreting words that denote par-
representation of [3]. But bear in mind that an entire semantic represen-
tation for a whole scene can be a quite complex object, showing relations
between many different individual fragments; further semantic information
is expressed in the depiction rules described below. Also note that part of
the complexity of PAR is due to the fact that that system is geared towards
generating animation rather than static scenes.

(SEMANTICS :GENUS say
:VERB-FRAMES
((VERB-FRAME
:NAME SAY-BELIEVE-THAT-S-FRAME
:REQUIRED (SUBJECT THAT-S-OBJECT)
:OPTIONAL (ACTIONLOCATION ACTIONTIME))
(VERB-FRAME
:NAME SAY-BELIEVE-S-FRAME
:REQUIRED (SUBJECT S-OBJECT)
:OPTIONAL (ACTIONLOCATION ACTIONTIME)) ...))
Figure 4: Semantic entry for say.
ticular entities, actions or relations, WordsEye also interprets
anaphoric or coreferring expressions. Simple pronominals like he
or she, are interpreted by searching through the context to find
an appropriate coreferent (where appropriate includes matching on
number and gender features). Nouns can also corefer, as in the ex-
ample: John said that the cat was on the table. The animal was next
to a bowl of apples. While it is not strictly required that the animal
denote the cat mentioned in the previous sentence, the coherence of
the discourse depends upon the reader or listener making that con-
nection. WordsEye currently handles such associations by noting
that in the WordNet hierarchy, the denotations of cat are a subset
of the denotations of animal, and “guessing” that the noun phrase
might corefer with the previously mentioned cat (see, e.g., [13]).
Before closing the discussion of the natural language component
of WordsEye, it is worth noting two points. First of all, WordsEye
of necessity performs a fairly deep semantic analysis of the input
text. This contrasts with what counts for “understanding” in much
recent work on, for example, Message Understanding (MUC) (see,
e.g., [1]); in the MUC context one is typically trying to answer a
small number of questions about the text (e.g., who left which com-
pany to head up which other company), and so most approaches to
understanding in this context eschew a complete semantic analysis
of sentences. In WordsEye we do not have this luxury since the
number of “questions” to be answered in order to construct a scene
is in principle unbounded. Second, WordsEye owes an intellectual
debt to work in Cognitive Grammar [17]. While WordsEye is not
strictly speaking an implementation of this theory, Cognitive Gram-
mar’s model of semantics is like WordsEye’s in that it constructs
meanings of utterances out of graphical components that combine
in ways that are similar to WordsEye’s depiction phase, which we
now describe.
3 Depictors
All scenes are ultimately defined in terms of a set of low-level
graphical specifications which we call depictors. Depictors exist
to control 3D object visibility, size, position, orientation, surface
color and transparency. Depictors are also used to specify poses
of human characters, control Inverse Kinematics (IK), and modify
vertex displacements for facial expressions or other aspects of the
objects. In this section we examine depictors in more detail.
3.1 Object Database
The basic elements of any 3D scene are the objects themselves.
WordsEye currently utilizes approximately 2000 3D polygonal ob-
jects, with another 10,000 in the process of being integrated into
the system. The majority of the database is licensed from View-
point Digital and includes models for animal and human charac-
ters as well as buildings, vehicles, household items, plants, etc.
Since WordsEye is extensible, users can add their own models to
the database.
Figure 5: Spatial tag for “canopy area”, indicated by the box under
the lefthand chair; and “top surface”, indicated by the box on the
righthand chair.
In addition to the raw 3D data, WordsEye associates additional
information with each 3D model.
Skeletons: Objects can contain skeletal control structures.
These are used in human and animal characters to define poses rep-
resenting different actions.
Shape displacements: Some objects, like human faces, can
change shape (e.g., smiling, eyes closed, frowning, etc.). Shape dis-
placements are associated with the object and used to depict emo-
tions or other states of the object.
Parts: These are named collections of polygonal faces repre-
senting significant areas of the surface. For example, the headlights,
roof, and windshield of a car would be in different parts.
Color parts: These are the set of parts to be colored when the
object is specified by the text as having a particular color. For ex-
ample, in the blue flower, the petals of the flower should be colored
blue, not the stem. If no color parts are specified, the largest part is
colored.
Opacity parts: These are parts that get a default transparency
(e.g., the glass part of a framed window).
Default size: All objects are given a default size, expressed in
feet.
Functional properties: These properties are used in the depic-
tion process to determine how an object can be used. For example,
cars, bicycles, trucks, and motorcycles are all road vehicles. Then,
while depicting the verb ride, we select among these to choose a
vehicle in the sentence John rides to the store.
Spatial tags: In order to depict spatial relations, the shape of
the objects in question must be known. We do this by associating
spatial tags with all objects in the database. For example the inte-
rior area of an ashtray functions as a cup to contain whatever is put
in it. The area is marked with a tag (a simple space-filling 3D ob-
ject) representing the cupped interior. This is used when depicting
spatial relations such as in and sometimes on. Some examples of
spatial tags are: canopy area and top surface (Figure 5); and base
and cup (Figure 6). Other spatial tags not shown here are wall, cap,
enclosed-area, ridge, peak.
3.2 Spatial Relations
Spatial relations define the basic layout of scenes. They include
relative positions as in John is next to Mary, distances as in The
chair is 5 feet behind the table, and orientations as in John is facing
the abyss. And, as discussed later, spatial relations are frequently
an implicit part of actions and compound objects.
Spatial relations are often denoted by prepositions like on, under,
beyond, etc. The exact placement of objects, in depictions of spa-
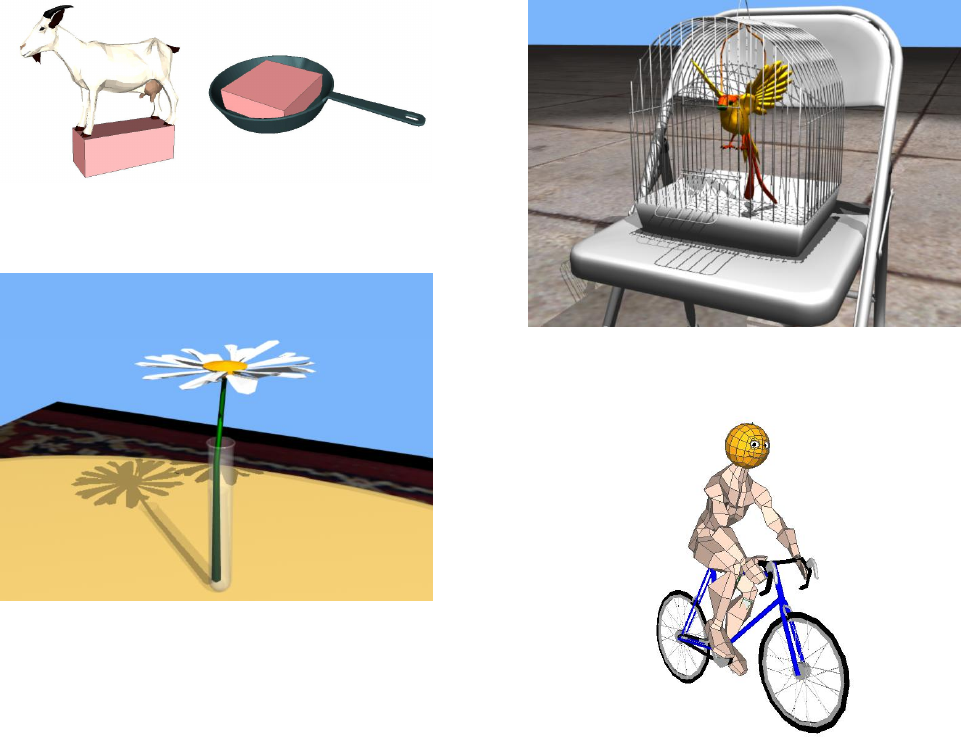
Figure 6: Spatial tags for “base” and “cup”.
Figure 7: The daisy is in the test tube.
tial relations, depends on the shapes and surfaces of those objects.
Additionally, terms like in and under can have different possible
spatial intepretations depending on the objects in question. For ex-
ample, The cat is under the table and The rug is under the table
denote different spatial areas. Some examples of spatial relations
are described below.
For The bird is on the cat, we find a top surface tag for the cat
(on its back) and a base tag for the bird (under its feet). We then
reposition the bird so that its feet are on the cat’s back.
For The daisy is in the test tube, we find the cup tag for the test
tube and the stem tag for the daisy and put the daisy’s stem into the
test tube’s cupped opening. See Figure 7. Spatial tags for stems are
applied to any object with a long, thin base leading to a thicker or
wider top area. Some objects with stems are stop signs, umbrellas,
palm trees and street lamps.
For The elephant is under the chair, we look for a canopy tag
for the chair (the area under the seat of the chair between the legs)
and put the elephant there. This might involve resizing the elephant
to make it fit. However, as noted earlier, under can also be inter-
preted so that the chair is put on the elephant’s back. Depending on
the size and shape of the objects in question, one interpretation or
another will be chosen. In general, we try to choose an interpreta-
tion that avoids resizing. However, we note that gross changes of
scale are extremely common in advertising and often highlight the
significance or functional role of the objects in question.
These examples are not meant to be an exhaustive list, but rather
illustrate the manner in which we use object tags to depict spatial
relations. A rendered example of a spatial relation using the top
surface and enclosure spatial tags is shown in Figure 8.
Figure 8: The bird is in the bird cage. The bird cage is on the chair.
Figure 9: Usage pose for a 10-speed.
3.3 Poses and Grips
Most actions are depicted in WordsEye via the use of predefined
poses, where a pose can be loosely defined as a character in a con-
figuration suggestive of a particular action.
Standalone poses consist of a character in a particular body po-
sition. Examples of this are waving, running, bowing, or kneeling.
Specialized usage poses involve a character using a specific in-
strument or vehicle. Some examples are swinging a baseball bat,
shooting a rifle, and riding a bicycle. For a bicycle, a human char-
acter will be seated on a bicycle with its feet on the pedals and hands
on the handlebars. In these, each pose is tightly associated with a
particular manipulated object; see Figure 9 for an example.
Generic usage poses involve a character interacting with a
generic stand-in object. The stand-in objects are represented by
simple markers like spheres and cubes. We use these in cases where
another object can convincingly be substituted for the stand-in. For
example, in the throw small object pose (Figure 10, left panel), the
ball is represented by a generic sphere. If the input sentence is John
threw the watermelon, the watermelon will be substituted for the
sphere in the same relative position with respect to the hand. The
new object can be substituted as is or, alternatively, resized to match
the size of the stand-in sphere. The positional and sizing constraints
are associated with the stand-in objects and are stored in the pose.
Grip poses involve a character holding a specific object in a cer-

Figure 10: “Throw small object” pose and “hold wine bottle” grip.
Figure 11: John rides the bicycle. John plays the trumpet.
tain way. Some objects can be used in a variety of ways while being
held in the same grip. For instance, if we have a grip for holding a
wine bottle (Figure 10, right panel), this grip can be used in vari-
ous poses, such as pouring wine, giving the bottle to someone else,
putting the bottle on a surface, and so forth. This technique allows
us to avoid a combinatorial explosion in the number of poses for
specific objects. We do not want a separate pour, give, and put pose
for every object in our database. We avoid this by having a small
number of grips for each object and then selecting the grip appro-
priate for the more generic action pose. To do this, we first put and
attach the object in the hand before going to the action pose. This
is facilitated by classifying objects and poses into categories repre-
senting their shape. For example, the poses swing long object and
hold long object might be applied to a sword in a hold sword grip.
Bodywear poses involve a character wearing articles of clothing
like hats, gloves, shoes, etc. These are used to attach the object to
the appropriate body part and are later combined with other poses
and body positions.
Another strategy we adopt is to combine upper and lower body
poses. Some poses require the whole body to be positioned, while
for others only the upper or lower body needs to be positioned.
We use the simple procedure of associating an active body part for
each pose, and then moving only those bones that are necessary
when more than one pose is applied to the same character. For
example, see Figure 11 which shows a character riding a bicycle
(lower) while playing the trumpet (upper).
3.4 Inverse Kinematics
Poses are effective for putting a character into a stance that suggests
a particular action. But for a scene to look realistic and convinc-
Figure 12: Spatial tag for “push handle” of baby carriage, indicated
by the box around the handle.
Figure 13: The lawn mower is 5 feet tall. John pushes the lawn
mower. The cat is 5 feet behind John. The cat is 10 feet tall.
ing, the character must sometimes interact directly with the envi-
ronment. We use IK to do this [25]. So, for example, in pointing, it
is not enough just to put the character into a pointing pose since the
object pointed at can be anywhere in the environment. Instead, the
hand must be moved with IK to point in the desired direction.
We also use IK to modify existing poses. For example, the push
large object pose consists of the character leaning toward an object
with legs in stride and arms outstretched. Consider, however, push-
ing various objects such as a lawnmower, a car, or a baby carriage.
Since the different objects have handles and surfaces at different
heights, no single body pose can work for them all. The hands must
be located at the correct position on the object. To do this, the char-
acter is first put behind the object in the push large object pose.
Then the hands are moved using IK to the handle or vertical sur-
face of the object. Note that this technique relies on object tags for
handle or vertical surface in order to determine the target position
for the IK; see Figure 12, and Figure 13 for a rendered example that
uses IK to move the hands to the handle of a lawnmower.
3.5 Attributes
WordsEye currently handles attributes for size, color, transparency
and shape. Color and transparency are applied to the object as sur-
face attributes. They are applied to the dominant part (as defined in
the object database) of the object unless otherwise specified. The
shape of the object can be modified using shape displacements in
the Mirai animation system. These are predefined states of ver-
tex positions associated with the 3D model that can be additively
combined. For example, in a human face, there can be separate dis-
placements for a smile and a wink. The various displacements can

be combined independently. We currently use this in WordsEye to
control facial expressions, but the same technique can be used for
other shape deformations (e.g., twisting, bending, etc.). An obvious
alternative is to use free-form deformations to dynamically com-
pute bending, twisting, and so forth [6]. Size (e.g., large, small)
and aspect ratio (e.g., flattened, squashed) attributes are controlled
by manipulating the 3D object’s transform matrix.
4 The Depiction Process
All scenes are ultimately defined in terms of a set of low-level
depictors (3D objects and their spatial and graphical properties).
The job of WordsEye’s depiction module is to translate the high-
level semantic representation produced by the linguistic analysis
into these low-level depictors. The process involved in the creation
and application of depictors, leading to a final rendering, is outlined
below:
1. Convert the semantic representation from the node structure
produced by the linguistic analysis to a list of typed semantic
elements with all references resolved.
2. Interpret the semantic representation. This means answering
“who?” , “what?”, “when?”, “where?” “how?” when the
actor, object, time, location, and method are unspecified.
3. Assign depictors to each semantic element.
4. Resolve implicit and conflicting constraints of depictors.
5. Read in referenced 3D models.
6. Apply each assigned depictor, while maintaining constraints,
to incrementally build up the scene.
7. Add background environment, ground plane, lights.
8. Adjust the camera, either automatically (currently by framing
the scene objects in a three quarters view) or by hand.
9. Render.
We now describe this process in more detail.
4.1 Depiction Rules
The output of the linguistic analysis is a semantic representation of
the text. The semantic representation in turn consists of a list of
semantic elements representing the various constituent meanings
and relations inherent in the input text. The main semantic element
types are ENTITY, ACTION, ATTRIBUTE and RELATION which
roughly correspond to nouns, verbs, adjectives and prepositions.
Some additional, more specialized types are PATHS, TIMESPEC,
CONJUNCTION, POSSESSIVE, NEGATION, CARDINALITY.
Each type of semantic element has various type-specific parame-
ters. For example, ACTIONS have tense. We omit these incidental
parameters in the examples below.
As an example, the sentence The cowboy rode the red bicycle to
the store is represented by the following semantic elements:
1. Entity: cowboy
2. Entity: bicycle
3. Entity: store
4. Attribute:
Subject:
element 2
Property: red
5. Action:
Actor: element 1
Action: ride
Object:
element 2
Path: element 6
6. Path:
Relation: to
Figure:
element 5
Ground: element 3
In order to depict a sentence, the semantic elements must be
made graphically realizable. This is done by applying a set of de-
piction rules. Depiction rules are tested for applicability and then
applied to translate semantic elements into graphical depictors.
As an example, we examine the depiction rule for the action kick.
We handle several cases. The first case is for large objects, where
the kicked object should be depicted on the ground in front of the
actor’s foot. This happens when there is no specified path (e.g., we
say John kicked the car, as opposed to something like John kicked
the car over the fence) and when the size of the direct object is
larger than some arbitrary size (for example, 3 feet).
The second case is for small objects where no path or recipient
is specified. It uses the kick object pose and substitutes the kicked
object for the stand-in object in the pose, placed above the foot.
This would be used with sentences like John kicked the football.
The football gets put in the air, just above the foot.
The third case is used when the actor kicks the object on a path
(e.g., to a recipient). This might correspond to sentences like John
kicked the football to Mary. The PATH-DEPICTOR used in this
depiction rule specializes in depicting objects on paths.
Note that some depictors are marked as tentative because they
are just defaults and are not inherent to the kicking action. Also note
that the depiction rules described above are somewhat simplified;
they can be made arbitrarily more complex to handle various special
cases and subtleties.
DEFINE-DEPICTION-RULE ACTION kick
Case1: no PATH or RECIPIENT, DIRECT-OBJECT size
greater than 3 feet
Pose: kick, ACTOR
Position: ACTOR directly behind DIRECT-OBJECT
Orientation: ACTOR facing DIRECT-OBJECT
Case2: no PATH or RECIPIENT, DIRECT-OBJECT size less
than 3 feet
Pose: kick object, ACTOR, DIRECT-OBJECT
Case3: PATH and RECIPIENT
Pose: kick, ACTOR
Path: DIRECT-OBJECT between ACTOR’s foot and
RECIPIENT
Orientation: ACTOR facing RECIPIENT
Pose: catch, RECIPIENT [tentative]
Orientation: RECIPIENT facing ACTOR [tentative]
Position: ACTOR 10 feet from RECIPIENT in Z axis
[tentative]
Position: ACTOR 0 feet from RECIPIENT in X axis
[tentative]
In some cases, depending on the object in question, different
poses may be applied to the same basic action. For example, differ-
ent objects (e.g., baseball, soccer ball, frisbee, javelin) are thrown
in different manners. The depiction rules are responsible for finding
the most appropriate pose for the action, given the total context of
the semantic elements.
For attributes, depiction rules can create depictors for size, color,
transparency, aspect ratio, and other directly depictable properties
of the objects. Sometimes an attribute is best depicted by attaching
an iconic appendage to the object. This is illustrated in the follow-
ing depiction rule, which is used to depict a spinning object. Since
we cannot directly depict motion, we can suggest it iconically by
putting a circular arrow above the given object.
DEFINE-DEPICTION-RULE ATTRIBUTE spinning
Spatial-Relation: above, SUBJECT, circular arrow 3D model
For entities themselves, depiction rules are normally responsible
for selecting which 3D object to use. This is currently done by se-
lecting randomly among those matching the given term. In some
cases, however, an entity is depicted by an assembly of separate 3D
objects. With environments (e.g., a living room), this will almost
always be the case. And in another example, cowboy might be de-
picted as a human character wearing a cowboy hat. So we create
a pose depictor that positions and attaches the cowboy hat to the
actor’s head.
DEFINE-DEPICTION-RULE ENTITY cowboy
Pose: wear cowboy hat, ACTOR
4.2 Implicit Constraints
In certain circumstances it is desirable to add depictors for con-
straints that are not explicitly stated, but rather are based on com-
mon sense knowledge or are in some way deducible from the se-
mantic representation. A set of transduction rules is invoked to do
this.
Consider: The lamp is on the table. The glass is next to the lamp.
Although it is not stated that the glass is on the table, we probably
want it there rather than floating in the air next to the lamp. To do
this, we invoke a rule that says “If X is next to Y, X is not already on
a surface, and X is not an airborne object (e.g., a helium balloon)”
then “Put X on the same surface as Y”.
Consider next the sentence The cat and the dog are on the rug.
Since there is no specification of where on the rug the cat and dog
are located, it would be logically consistent to put the dog and cat in
exactly the same place on the rug. To avoid this unintuitive result,
we invoke a rule that says “If X is on Y, and Y is on Z, and X and
Y are not spatially constrained” then “Put X next to Y”. Note that
although the previous rule is specified only with respect to the on
relation, a more general formulation is possible.
4.3 Conflicting Constraints
Depiction specifications sometimes conflict with one another. This
typically occurs when the default depictors assigned by an action
conflict with those explicitly specified elsewhere. For example,
John kicked the ball to Mary will generate depictors to put John
in a kick pose, put John behind and facing Mary, put the ball be-
tween John and Mary, etc. Some of those depictors, such as the
exact positions of the two characters, are labeled tentative because
they are just defaults and are not inherent to the kicking pose.
1. POSE: John in kick pose
2. PATH: Ball between John’s foot and Mary
3. ORIENTATION: John facing Mary
4. POSE: Mary in catch pose [tentative]
5. ORIENTATION: Mary facing John [tentative]
6. POSITION: John 10 feet from Mary in Z axis [tentative]
7. POSITION: John 0 feet from Mary in X axis [tentative]
But assume we add the specifications that Mary is 20 feet to the left
of John and Mary is 30 feet behind John. which generates these
depictors:
8. POSITION: Mary 20 feet from John in X axis
9. POSITION: Mary 30 feet from John in Z axis
We now have a conflict between depictors 6,7 and 8,9. To resolve
these, a transduction rule is invoked that when detecting a conflict
between depictors X and Y, where X is tenative, will remove depic-
tor X. So, in this example since depictors 6,7 are marked as tenta-
tive, they are removed. The following is the result:
1. POSE: John in kick pose
2. PATH: Ball between John’s foot and Mary
3. ORIENTATION: John facing Mary
4. POSE: Mary in catch pose [tentative]
5. ORIENTATION: Mary facing John [tentative]
6. POSITION: John 20 feet from Mary in Z axis
7. POSITION: John 30 feet from Mary in X axis
4.4 Applying Depictors
In order to actually create a coherent scene, the various independent
graphical depictors (poses, spatial relations, etc.) derived from the
semantic representation need to be applied. This is done by apply-
ing constraints in a simple prioritized manner:
1. Objects are initialized to their default size and shape. Size and
color changes to objects are made at this stage also.
2. Apply shape changes and attachments. Characters are put into
poses, and instruments and other pose-related objects are at-
tached. At the same time, shape changes (for facial expres-
sions, etc.) are made. The integration of upper and lower
body poses are also handled at this stage.
3. Once objects are in their correct shapes and poses, all objects
are positioned, with the exception of objects placed on paths
in step 5. Once objects are constrained together (indepen-
dently in each axis), neither can be moved without the other
(along that axis).
4. With objects in the correct poses/shapes and positions, orien-
tations are applied. This handles cases where one object is
specified to face another or in some particular direction.
5. Dynamic operations such as placing objects on paths and IK
are now performed.
4.5 Interpretation, Activities, Environment
In order for text to be depicted, it must first be interpreted. A sen-
tence like John went to the store is somewhat vague. We do not
know if John drove, walked, ice skated, hitchhiked, etc. Further-
more, we do not know how old John is, how he is dressed, or
whether he is doing anything else on the way. Nor do we know
the type of store, its location, what type of building it is in, or the
path taken to get there. To be depicted, these must be resolved. This
will often involve adding details that were not explictly stated in the
text.

We rely on the functional properties of objects to make some
of these interpretations. Verbs typically range along a continuum
from pure descriptions of state changes like John went to the store
to more explicit specifications of manner like John crawled to the
store. Sometimes an instrument (or vehicle) is mentioned as in John
rode a bicycle to the store while in other cases, the type of instru-
ment is only implied by the verb as in John rode to the store. To find
implied instruments, we look for objects whose functional proper-
ties are compatible with the instrument type demanded by the verb.
In this case we want a rideable vehicle and find (among others) a
bicycle. We then apply the “usage” pose for that object (bicycle).
In this way, the sentence John rode to the store gets depicted with
John in a riding pose on a bicyle.
Very often the interpretation will depend on the setting of the
scene, either an environment (e.g., a forest) or an activity (e.g., a
football game). Sometimes there is no explicitly specified environ-
ment, in which case an environment compatible with the rest of the
text could be supplied. Consider, for example, The flower is blue.
Rather than just depicting a blue flower floating on the page, we
have the option of supplying a background. The simplest case for
this is a ground plane and/or supporting object. For more visually
complex cases, we may want to put the flower in a vase on a fire-
place mantle in the middle of a fully decorated living room. Even
when the setting is specified as in John walked through the forest, it
must be resolved into specific objects in specific places in order to
be depicted.
It should be noted that the same type of semantic inferences
made with instrumental objects can also be applied to settings. For
the sentence John filled his car with gas, we know he is proba-
bly at a gas station and we might want to depict John holding the
gas pump. WordsEye currently does not have enough real-world
knowledge or the mechanisms in place to handle environments or
activities but we recognize their importance both to interpreting se-
mantic representations and adding background interest to otherwise
more purely literal depictions.
4.6 Figurative and Metaphorical Depiction
Many sentences include abstractions or describe non-physical prop-
erties and relations, and consequently they cannot be directly de-
picted. We use the following techniques to transform them into
something depictable:
Textualization: When we have no other way to depict an entity
(for example, it may be abstract or maybe we do not have a match-
ing 3D model in our database), we generate 3D extruded text of the
word in question. This can sometimes generate amusing results:
see Figure 14.
Emblematization: Sometimes an entity is not directly de-
pictable, but some 3D object can be an emblem for it. In those
cases, the emblem is used. A simple example of an emblem is a
light bulb to represent the word idea, or a church to (somewhat eth-
nocentrically) represent religion. We also use emblems to represent
fields of study. For example, entomology is depicted by a book with
an insect as an emblem on its cover.
Characterization: This is a specialized type of emblematization
related to human characters in their various roles. In order to depict
these, we add an article of clothing or have the character hold an
instrument that is associated with that role. So, for example, a cow-
boy will wear a cowboy hat, a football player will wear a football
helmet, a boxer will wear boxing gloves, a detective might carry a
magnifying glass, and so on.
Conventional icons: We use comic book conventions, like
thought bubbles, to depict the verbs think or believe. The thought
bubble contains the depiction of whatever is being thought of. Like-
wise, we use a red circle with a slash to depict not; see Figure 15.
The interior of the circle contains the depiction of the subject matter
Figure 14: The cat is facing the wall.
Figure 15: The blue daisy is not in the army boot.
being negated. This same sort of depiction process can be applied
recursively. For example, for John thinks the cat is not on the table,
the thought bubble contains a red-slashed circle which in turn con-
tains the cat on the table. Alternatively, John does not believe the
radio is green is depicted with the slashed circle encompassing the
entire depiction of John and the thought bubble and its contents;
see Figure 16. Similarly, comic book techniques like speed lines
and impact marks could be used to depict motion and collisions.
Literalization: Sometimes figurative or metaphorical meanings
can be depicted most effectively in a literal manner: see Figure 17.
We note that this is a well established technique. For example, T. E.
Breitenbach’s poster “Proverbidioms”
3
contains depictions of hun-
dreds of figures of speech. Throwing the baby out with the bathwa-
ter is depicted literally, as a baby being tossed out a window along
with a tub of bathwater. This approach comes naturally to Words-
Eye.
Personification: When metaphorical statements are interpreted
literally, an inanimate or abstract entity often needs to be depicted
in a human role (e.g., Time marches on). Our current minimalist
approach is to affix some representation (flattened object, text, or
emblem) of that entity onto a generic human character’s chest as a
visual identifier, like Superman’s “S”. A more satisfactory solution
would be, in cartoon style, to give the object a set of generic legs
and arms and a superimposed face.
3
www.tebreitenbach.com/posters.htm

Figure 16: John does not believe the radio is green.
Figure 17: The devil is in the details.
Degeneralization: General categorical terms like furniture can-
not be depicted directly. We depict these by picking a specific ob-
ject instance of the same class (in this case, perhaps chair). This
works well enough in most cases, as in John bought a piece of fur-
niture. But sometimes, thereference is to the general class itself and
hence the class, not an instance of it, should be depicted as in This
table lamp is not furniture. We currently do not handle this case.
One depiction strategy might be to choose a representative, generic
looking object within the class and affix a textual label consisting
of the class name itself.
5 Discussion and Future Work
We believe WordsEye represents a new approach to creating 3D
scenes and images. It is not intended to completely replace more
traditional 3D software tools, but rather to augment them by, for
example, allowing one to quickly set up a scene to be later refined
by other methods. WordsEye focuses on translating the semantic
intent of the user, as expressed in language, into a graphic represen-
tation. Since semantic intent is inherently ambiguous, the resulting
3D scene might only loosely match what the user expected. Such
variability, however, will be an asset in many cases, providing in-
teresting and surprising interpretations. And when users want to
control a depiction more precisely, they can adjust their language to
better specify the exact meaning and graphical constraints they en-
Figure 18: Some real 1st Grade homework, and a WordsEye “inter-
pretation”.
vision. We believe that the low overhead of language-based scene
generation systems will provide a natural and appealing way for
everyday users to create imagery and express themselves.
WordsEye is currently a research project and is under active de-
velopment. We expect that eventually this technology will evolve
into something that can be applied to a wide variety of applications,
including: First and second language instruction (see Figure 18);
e-postcards (cf. www.bluemountain.com); visual chat; story
illustrations; game applications; specialized domains, such as cook-
book instructions or product assembly.
In its current state, WordsEye is only a first step toward these
goals. There are many areas where the capabilities of the system
need to be improved, such as: Improvements in the coverage and
robustness of the natural language processing, including investigat-
ing corpus-based techniques for deriving linguistic and real-world
knowledge; language input via automatic speech recognition rather
than text; a larger inventory of objects, poses, depiction rules, and
states of objects; mechanisms for depicting materials and textures;
mechanisms for modifying geometric and surface properties of ob-
ject parts (e.g. John has a long red nose); environments, activities,
and common-sense knowledge about them; comic-style multiple
frames for depicting sequences of activities in a text; methods for
handling physical simulations of skeletal dynamics, shape deforma-
tion and natural phenomena. Work is ongoing to improve Words-
Eye along these various lines. However, we feel that even in its
present state, WordsEye represents a significant advance in a new
approach to the graphical expression of a user’s ideas.
6 Acknowledgements
We thank Michael Collins, Larry Stead, Adam Buchsbaum, and the
people at IZware for support of some of the software used in Words-
Eye. We also thank audiences at the University of Pennsylvania
and Bell Labs for feedback on earlier presentations of this material.
Finally we thank anonymous reviewers for SIGGRAPH 2001 for
useful comments.
References
[1] Proceedings of the Sixth Message Understanding Conference
(MUC-6), San Mateo, CA, 1995. Morgan Kaufmann.
[2] G. Adorni, M. Di Manzo, and F. Giunchiglia. Natural Lan-
guage Driven Image Generation. In COLING 84, pages 495–
500, 1984.
[3] N. Badler, R. Bindiganavale, J. Allbeck, W. Schuler, L. Zhao,
and M. Palmer. Parameterized Action Representation for Vir-
tual Human Agents. In J. Cassell, J. Sullivan, S. Prevost, and
E. Churchill, editors, Embodied Conversational Agents, pages
256–284. MIT Press, Cambridge, MA, 2000.
[4] R. Bindiganavale, W. Schuler, J. Allbeck, N. Badler, A. Joshi,
and M. Palmer. Dynamically Altering Agent Behaviors Using
Natural Language Instructions. In Autonomous Agents, pages
293–300, 2000.
[5] C. Brugman. The Story of Over. Master’s thesis, University
of California, Berkeley, Berkeley, CA, 1980.
[6] Y. Chang and A. P. Rockwood. A Generalized de Casteljau
Approach to 3D Free-Form Deformation. In SIGGRAPH 94
Conference Proceedings, pages 257–260. ACM SIGGRAPH,
Addison Wesley, 1994.
[7] K. Church. A Stochastic Parts Program and Noun Phrase
Parser for Unrestricted Text. In Proceedings of the Second
Conference on Applied Natural Language Processing, pages
136–143, Morristown, NJ, 1988. Association for Computa-
tional Linguistics.
[8] S. R. Clay and J. Wilhelms. Put: Language-Based Interac-
tive Manipulation of Objects. IEEE Computer Graphics and
Applications, pages 31–39, March 1996.
[9] M. Collins. Head-Driven Statistical Models for Natural
Language Parsing. PhD thesis, University of Pennsylvania,
Philadelphia, PA, 1999.
[10] C. Fellbaum, editor. WordNet: An Electronic Lexical
Database. MIT Press, Cambridge, MA, 1998.
[11] C. Freksa, C. Habel, and K. F. Wender, editors. Spatial Cog-
nition. Springer, Berlin, 1998.
[12] J. Funge, X. Tu, and D. Terzopoulos. Cognitive Modeling:
Knowledge, Reasoning and Planning for Intelligent Charac-
ters. In SIGGRAPH 99 Conference Proceedings, pages 29–
38. ACM SIGGRAPH, Addison Wesley, 1999.
[13] Sanda Harabagiu and Steven Maiorano. Knowledge-lean
coreference resolution and its relation to textual cohesion and
coherence. In Proceedings of the ACL-99 Workshop on the Re-
lation of Discourse/Dialogue Structure and Reference, pages
29–38, College Park, MD, 1999. Association for Computa-
tional Linguistics.
[14] B. Hawkins. The Semantics of English Spatial Prepositions.
PhD thesis, University of California, San Diego, San Diego,
CA, 1984.
[15] A. Herskovitz. Language and Spatial Cognition: An Inter-
disciplinary Study of the Prepositions in English. Cambridge
University Press, Cambridge, 1986.
[16] R. Hudson. Word Grammar. Blackwell, Oxford, 1984.
[17] R. Langacker. Foundations of Cognitive Grammar : Theoret-
ical Prerequisites. Stanford University Press, Stanford, CA,
1987.
[18] B. Levin. English Verb Classes And Alternations: A Prelimi-
nary Investigation. University of Chicago Press, Chicago, IL,
1993.
[19] M. Marcus, B. Santorini, and M. A. Marcinkiewicz. Building
a Large Annotated Corpus of English: the Penn Treebank.
Computational Linguistics, 19(2):313–330, 1993.
[20] P. Olivier and K.-P. Gapp, editors. Representation and Pro-
cessing of Spatial Prepositions. Lawrence Erlbaum Asso-
ciates, Mahwah, NJ, 1998.
[21] C. W. Reynolds. Flocks, Herds and Schools: A Distributed
Behavioral Model. In SIGGRAPH 87 Conference Proceed-
ings, pages 25–34.ACM SIGGRAPH, Addison Wesley, 1987.
[22] G. Senft, editor. Referring to Space: Studies in Austronesian
and Papuan Languages. Clarendon Press, Oxford, 1997.
[23] T. Winograd. Understanding Natural Language. PhD thesis,
Massachusetts Institute of Technology, 1972.
[24] A. Yamada. Studies on Spatial Description Understanding
based on Geometric Constraints Satisfaction. PhD thesis, Ky-
oto University, Kyoto, 1993.
[25] J. Zhao and N. Badler. Inverse Kinematics Positioning Using
Nonlinear Programming for Highly Articulated Figures. ACM
Transactions on Graphics, pages 313–336, October 1994.
