
Copyright Undertaking
This thesis is protected by copyright, with all rights reserved.
By reading and using the thesis, the reader understands and agrees to the following terms:
1. The reader will abide by the rules and legal ordinances governing copyright regarding the
use of the thesis.
2. The reader will use the thesis for the purpose of research or private study only and not for
distribution or further reproduction or any other purpose.
3. The reader agrees to indemnify and hold the University harmless from and against any loss,
damage, cost, liability or expenses arising from copyright infringement or unauthorized
usage.
IMPORTANT
If you have reasons to believe that any materials in this thesis are deemed not suitable to be
distributed in this form, or a copyright owner having difficulty with the material being included in
our database, please contact [email protected] providing details. The Library will look into
your claim and consider taking remedial action upon receipt of the written requests.
Pao Yue-kong Library, The Hong Kong Polytechnic University, Hung Hom, Kowloon, Hong Kong
http://www.lib.polyu.edu.hk
SAFETY OF PROFESSIONAL DRIVERS IN HONG KONG
TIANTIAN CHEN
PhD
The Hong Kong Polytechnic University
2021
The Hong Kong Polytechnic University
Department of Civil and Environmental Engineering
Safety of Professional Drivers in
Hong Kong
Tiantian Chen
A thesis submitted in partial fulfilment of the requirements for the degree
of Doctor of Philosophy
July 2020

CERTIFICATE OF ORIGINALITY
I hereby declare that this thesis is my own work and that, to the best of my knowledge
and belief, it reproduces no material previously published or written, nor material that has
been accepted for the award of any other degree or diploma, except where due
acknowledgement has been made in the text.
(Signed)
CHEN Tiantian (Name of student)
Dedicated with love and gratitude to the memory of my grandfathers,
Zhenxiong Chen and Winglam Chong.
i
Abstract
Safety of professional drivers is of great concern around the world, especially in the public
transit-oriented cities like Hong Kong. The higher rates of traffic violation rates, fatigue
driving, aggressive driving, as well as the increasing proportion of older drivers are the
main contributory factors to the crashes involving commercial vehicles. In this study,
safety of professional drivers in Hong Kong is assessed from the behavioural,
psychological, and empirical perspectives. Therefore, effective traffic control and driver
management measures can be implemented to improve the safety of professional drivers.
First, effects of driving time, age, traffic condition and road environment on the driving
performance of professional drivers are evaluated using the driving simulator approach,
with which the difference in the driving performance between professional and non-
professional drivers are considered. Results indicate that age-related impairments on
driving performance could be reduced by the driving experience and task familiarity of
professional drivers. Furthermore, two modified traffic conflict measures were used to
investigate the compensatory strategy and strategic adaptation of professional drivers. It
is found that, despite the longer brake reaction time of older drivers, the likelihood of
more severe traffic conflict of older drivers was lower, especially for professional drivers.
Second, attitudes of professional drivers towards the enforcement and penalties against
speeding violations are evaluated using a perception survey. A stated preference survey
approach is adopted to gauge the trade-off between enforcement strategies, penalty levels
and speed choice of the professional drivers. A panel mixed logit regression model is
adopted to account for the effects of unobserved heterogeneity. Results indicated that the
professional drivers are more sensitive to the increase in driving-offence points as
compared to monetary fines. Also, presence of a warning sign is effective in enhancing
speed compliance. Several demographic and employment characteristics, driving history
and perception variables also influence drivers’ choices of speed compliance.
Third, safety effects of the composition of commercial vehicles including taxis, public
buses, light goods vehicles, and heavy goods vehicles are assessed based on the integrated
traffic and crash data. A Bayesian random-parameter Tobit approach is adopted to
ii
measure the relationship between explanatory factors and the overall crash rates by injury
severity. Results reveal significant increasing effects of the proportions of taxi, buses,
light goods vehicles on the overall crash risk. Additionally, a Bayesian multivariate Tobit
model is applied to identify possible risk factors to the crash rates across different vehicle
types. Results indicate that crash rates of private car and light commercial vehicle would
increase with the increase in average lane width and presence of on-street parking, while
such finding is not valid for heavy commercial vehicle. Moreover, intersection density
has significant increasing effect only for the crash rate of light commercial vehicle.
Overall, findings of driving simulator study, stated preference survey and crash risk
analysis of professional drivers should be indicative to the driver licensing, training and
education, enforcement, and driver management strategies of the authorities and transport
operators that can enhance the safety performance of professional drivers in the long run.
(498 words)
iii
Publications arising from the thesis
Referred Journal:
Chen, T., Sze, N. N., & Bai, L. (2019). Safety of professional drivers in an ageing
society–A driving simulator study. Transportation Research Part F: Traffic Psychology
and Behaviour, 67, 101-112.
Chen, T., Sze, N. N., Saxena, S., Pinjari, A. R., Bhat, C. R., & Bai, L. (2020). Evaluation
of penalty and enforcement strategies to combat speeding offences among professional
drivers: a Hong Kong stated preference experiment. Accident Analysis & Prevention, 135,
105366.
Chen, T., Sze, N.N., Chen Sikai, Samuel Labi (2020). Urban road space allocation
incorporating the safety and construction cost impacts of lane and footpath widths.
Journal of Safety Research, 75, 222-232.
Chen, T., Sze, N.N., Sharon Newnam, Bai, L. (2021). Effectiveness of the Compensatory
Strategy Adopted by Older Drivers: Difference between Professional and Non-
professional drivers. Transportation Research Part F: Traffic Psychology and Behaviour,
accepted.
Chen, T., Sze, N.N., Chen Sikai, Samuel Labi, Zeng, Qiang (2021). Analysing the main
and interaction effects of commercial vehicle mix and roadway attributes on crash rates
using a Bayesian random-parameter Tobit model. Accident Analysis & Prevention, under
2
nd
review.
Chen, T., Sze, N.N., Zeng, Qiang (2020). Multivariate Tobit modeling of crashes
involving private cars, light commercial vehicles, and heavy commercial vehicles.
Accident Analysis & Prevention, to be submitted
iv
Conference paper
Sze, N.N. & Chen, T. (2018) Factors affecting the driving performance of elderly
professional drivers: A driving simulator study. Paper presented at the 23
rd
International
Conference of Hong Kong Society for Transportation Studies, 8-10 December, Hong
Kong.
Sze, N.N. & Chen, T. (2018) Temporal change in the driving performance of professional
driver: a driving simulator study. Proceedings of the 6
th
International Symposium on
Reliability Engineering and Risk Management, 31 May-1 June, Singapore.
Chen, T., Bai, L., & Sze, N. N. (2019, July). Factors affecting the severity of rear-end
conflicts: a driving simulator study. In 2019 5th International Conference on
Transportation Information and Safety (ICTIS) (pp. 1182-1187). IEEE. (Best paper
award)
Chen, T., Sze, N.N. & Bai, L. (2019) Effective enforcement and penalty strategies to
combat speeding offence of professional drivers. Paper presented at the 24
th
International
Conference of Hong Kong Society for Transportation Studies, 14-16 December, Hong
Kong.
Chen, T., Sze, N. N., Saxena, S., Pinjari, A. R., Bhat, C. R., & Bai, L. (2020). Evaluation
of penalty and enforcement strategies to combat speeding offences among professional
drivers: a Hong Kong stated preference experiment. Paper presented at the 99
th
Annual
Meeting of the Transportation Research Board (TRB 2020), 12-16 January, Washington,
DC.
v
Acknowledgements
First and foremost, I would like to express my most sincere gratitude to my chief
supervisor, Dr. Nang-ngai Sze, for his unreserved guidance and supervision. The priceless
time he spent with me on this research is gratefully appreciated. I have gained the once-
in-a-lifetime chance of PhD study and a lot of knowledge from him. He shows much
patience and kindness throughout my postgraduate study. He cares about the health and
well-being of the students and encourages us a lot when we face difficulties either in our
research or daily life. He has also provided me with valuable opportunities for improving
my research abilities and interpersonal skills. He is an excellent supervisor, a friend, a
family, and a life mentor to me. I would not be here without him.
I would like to deliver my heartfelt thanks to my co-supervisor, Prof. Anthony Chen, for
always sharing interesting ideas with me, encouraging me to expand my research area,
and providing professional advice and support to me. He is very meticulous and careful
in scientific research and he always cares about the student's future development.
Next, I must sincerely thank the members of my Thesis Examining Committee, including
Professor Yuhong Wang, who kindly chaired the committee during the COVID-19
pandemic, as well as the two examiners, Professor Becky Loo, and Dr. Shimul (Md.
Mazharul) Haque, who kindly provided invaluable suggestions and guidance before and
during the oral examination. Without their help, I can hardly improve my thesis to this
finalized version.
Also, I would like to thank Prof. Chandra R. Bhat (from the University of Texas at Austin)
for his valuable guidance and critical comments on some of my works. I have learned a
lot from him during our individual meetings. Many thanks to my collaborators, Dr. Abdul
Rawoof Pinjari and Mr. Shobhit Saxena (from the Indian Institute of Science), Dr. Sharon
Newnam (from Monash University), Dr. Lu Bai (currently at the University of Hong
Kong), Dr. Qiang Zeng (from the South China University of Technology), Dr. Sikai Chen
and Prof. Samuel Labi (from Purdue University), for their wisdom provided to enhance
the quality of the research works. My sincere thanks are also sent to my groupmates in
vi
the transportation team of the Hong Kong Polytechnic University, for the fruitful
discussions over the past few years. I also wish to thank our laboratory technician Emily
Fung for her efficient assistance during my experimental works.
And of course, to my close friends, Man Lin and Jiayi Su, thanks for bringing me laughter
during my tough times and for our friendship since junior school.
Throughout my life, my mom and dad provide me with unwavering love and encourage
me to fight for my pursuits. Thanks, my dearest parents, Sihong Chen and Minmin
Zhuang, this journey would not have been possible without your support. After a long
day with the research works, there is nothing better to go home and chat with my brother
and grandmother. Indeed, I am greatly indebted to my beloved brother Wongwai Chan
and grandmother Honin Lam, for their patience, understanding and care.
Finally, I know I rarely mention two of my grandfathers. In fact, I do want to show my
sincere love to them at this juncture. My grandfather Mr. Chen passed away before I was
born. My father told me that he dreamed about grandpa before mom gave birth to me, and
in that dream, grandpa was taking a little girl home. Since I was a little girl, I have heard
a lot of stories about grandpa, such as how he loved to study, and how he faced life
positively. Since I came to Hong Kong for postgraduate study, my grandfather Mr. Chong
took very good care of me. However, he passed away before I received my PhD offer.
When I was applying for admission, my family meanwhile held a funeral for my grandpa
just beside PolyU. During these years of study, it is hard for me to walk through that street
as it evokes grieved memories. This thesis is dedicated with love and gratitude to the
memory of my grandfathers, and I strongly believe they would watch over me from the
stars.
Tiantian Chen
Jan 2021
vii
Table of Contents
Abstract ............................................................................................................................. i
Acknowledgements ......................................................................................................... v
List of Figures ................................................................................................................. xi
List of Tables ................................................................................................................. xii
Chapter 1 Introduction .................................................................................................. 1
1.1 Background of this study ............................................................................. 1
1.1.1 Driving performance of professional drivers ........................................ 2
1.1.2 Attitudes and behaviours of professional drivers ................................. 3
1.1.3 Crash risk of commercial vehicles ........................................................ 4
1.2 Research aims and objectives ...................................................................... 5
1.3 Thesis organization ...................................................................................... 6
Chapter 2 Literature review .......................................................................................... 8
2.1 Driving performance .................................................................................... 8
2.1.1 Driving performance of professional drivers ........................................ 8
2.1.2 Risk compensation and driving performance ..................................... 10
2.1.3 Driving performance indicators .......................................................... 11
2.2 Perceptions, attitudes, and behaviours ....................................................... 13
2.2.1 Attitudes and behaviours of professional drivers ............................... 13
2.2.2 Effect of driver age on attitudes and behaviours ................................ 14
2.2.3 Driver’s perception towards traffic legislation ................................... 15
2.3 Crash risk analysis ..................................................................................... 19
2.3.1 Effects of road environment on crash risk .......................................... 19
2.3.2 Crash risks of commercial vehicles .................................................... 20
2.3.3 Effect of commercial vehicle mix ....................................................... 21
2.3.4 Modelling crash counts and crash rates .............................................. 25
2.4 Concluding remarks ................................................................................... 27
viii
Chapter 3 Evaluation of driving performance using driving simulator .................. 29
3.1 Introduction ................................................................................................ 29
3.2 Simulator experiment design ..................................................................... 30
3.2.1 Participants .......................................................................................... 30
3.2.2 Apparatus, driving scenario and test procedures ................................ 31
3.3 Driving performance indicators ................................................................. 34
3.4 Statistical method ....................................................................................... 37
3.5 Results ........................................................................................................ 38
3.5.1 Lateral stability ................................................................................... 45
3.5.2 Stability of steering control ................................................................. 45
3.5.3 Steering error ...................................................................................... 46
3.5.4 Speed stability ..................................................................................... 46
3.6 Discussion .................................................................................................. 47
3.6.1 Effect of age on driving performance ................................................. 47
3.6.2 Performance of professional drivers ................................................... 48
3.6.3 Effect of other factors on driving performance .................................. 49
3.7 Concluding remarks ................................................................................... 50
Chapter 4 Evaluation of conflict risk using driving simulator ................................. 53
4.1 Introduction ................................................................................................ 53
4.2 Simulator experiment design ..................................................................... 54
4.2.1 Participants .......................................................................................... 54
4.2.2 Driving scenario and test procedures .................................................. 55
4.3 Surrogate safety measures ......................................................................... 57
4.4 Statistical method ....................................................................................... 58
4.5 Results ........................................................................................................ 60
4.5.1 Driving capability ............................................................................... 61
4.5.2 Compensatory behaviour .................................................................... 61
4.5.3 Safety effectiveness of the compensatory strategy ............................. 62
4.6 Discussion .................................................................................................. 67
4.6.1 Effective compensatory strategy of professional drivers .................... 68
4.6.2 Strategic adaptation of professional driver ......................................... 69
ix
4.6.3 Study limitations ................................................................................. 70
4.7 Concluding remarks ................................................................................... 71
Chapter 5 Perceptions and attitudes of professional drivers .................................... 73
5.1 Introduction ................................................................................................ 73
5.2 Stated preference survey design ................................................................ 75
5.3 Data collection and sample used ................................................................ 79
5.3.1 Driver demographics and employment characteristics ....................... 82
5.3.2 Driver history and safety perceptions ................................................. 84
5.4 Statistical method ....................................................................................... 85
5.5 Results and discussion ............................................................................... 88
5.5.1 Effects of penalty level and enforcement strategy .............................. 93
5.5.2 Effects of demographic characteristics of professional drivers .......... 95
5.5.3 Effects of operational characteristics of professional drivers ............. 96
5.5.4 Driver history and safety perceptions ................................................. 97
5.5.5 Marginal effects due to changes in SP attributes ................................ 98
5.6 Concluding remarks ................................................................................. 101
Chapter 6 Effects of commercial vehicle mix and multivariate analysis of crash
rates by vehicle type .................................................................................. 104
6.1 Introduction .............................................................................................. 104
6.2 Data collection ......................................................................................... 106
6.2.1 Overall crash rates by injury severity ............................................... 106
6.2.2 Crash rates by vehicle type ............................................................... 110
6.3 Model specification and goodness-of-fit ................................................. 114
6.3.1 Random parameter Tobit model ....................................................... 114
6.3.2 Multivariate Tobit model .................................................................. 117
6.3.3 Goodness-of-fit ................................................................................. 118
6.4 Results and discussion on the effects of commercial vehicle mix ........... 120
6.4.1 Effects of geometric factors .............................................................. 126
6.4.2 Effects of Traffic flow and traffic control ........................................ 127
6.4.3 Temporal effect ................................................................................. 128
6.4.4 Main effects of commercial vehicle proportions (CVPs) ................. 128
x
6.4.5 Interaction effects of CVPs and roadway attributes ......................... 130
6.5 Results and discussion on crash rates by vehicle type ............................. 132
6.5.1 Effects of geometric factors .............................................................. 135
6.5.2 Effects of traffic condition and time ................................................. 136
6.6 Concluding remarks ................................................................................. 137
Chapter 7 Conclusions and recommendations ......................................................... 140
7.1 General conclusions ...................................................................................... 140
7.2 Main findings and contributions .................................................................... 144
7.3 Limitations ..................................................................................................... 147
7.4 Recommendations for future research ........................................................... 148
7.4.1 Conventional driving performance measured by simulator .............. 148
7.4.2 Traffic conflict analysis using driving simulator .............................. 148
7.4.3 Perception survey .............................................................................. 149
7.4.4 Crash risk analysis for commercial vehicles ..................................... 149
References .................................................................................................................... 151
Appendix ...................................................................................................................... 180

xi
List of Figures
Figure 3. 1 OKTAL CDS-650 driving simulator .................................................... 31
Figure 3. 2 Typical scenarios for the simulated driving experiment ...................... 32
Figure 3. 3 Illustration of the heading error θ ......................................................... 35
Figure 3. 4 Driving performance of professional and non-professional drivers over
time ....................................................................................................... 44
Figure 4. 1 Typical simulated driving scenarios ..................................................... 56
Figure 4. 2 Illustration of proposed driving performance indicators ...................... 58
Figure 5. 1 Illustration of the location type and a hypothetical scenario for the
stated preference game ......................................................................... 78
Figure 6. 1 Study area (Hong Kong) showing the road segments studied and safety
trends ................................................................................................... 108
Figure 6. 2 Variation of commercial vehicle percentage by time of day .............. 108
Figure 6. 3 Normalized overall crash rates by injury severity under different
commercial vehicle mix ...................................................................... 110
Figure 6. 4 Histograms of private car, light commercial vehicle, and heavy
commercial vehicle crashes ................................................................ 113

xii
List of Tables
Table 2. 1 Summary of past related work ............................................................... 24
Table 3. 1 Summary of the participants of driving simulator study ....................... 31
Table 3. 2 Distribution of the completed driving simulator tests ........................... 33
Table 3. 3 Summary statistics for the simulated driving tests (N=1128) ............... 36
Table 3. 4 Results of parameter estimates of the (overall) random intercept models
.............................................................................................................. 39
Table 3. 5 Results of market segmentation analysis ............................................... 41
Table 3. 6 Results of parameter estimates for professional and non-professional
drivers ................................................................................................... 42
Table 4. 1 Summary of participants of driving simulator study ............................. 55
Table 4. 2 Summary statistics for the simulated driving tests ................................ 60
Table 4. 3 Estimation results of random intercept models for driving capability .. 64
Table 4. 4 Estimation results of random intercept models for compensatory
behavior ................................................................................................ 65
Table 4. 5 Estimation results of random parameter Tobit models for safety risk ... 66
Table 5. 1 Distribution of speed choices by location type ...................................... 80
Table 5. 2 Crosstabulation of SP attributes with speed choices at plain and warning
sections .................................................................................................. 81
Table 5. 3 Distribution of the sample ..................................................................... 82
Table 5. 4 Parameter estimates of a panel MMNL model for the speed choice of
professional drivers* ............................................................................. 90
Table 5. 5 Marginal effects due to changes in the SP attributes ........................... 100
Table 6. 1 Descriptive statistics of the variables .................................................. 109
Table 6. 2 Descriptive statistics of the variables .................................................. 114
Table 6. 3 Results of the goodness-of-fit tests ...................................................... 121
Table 6. 4 Results of random-parameter Tobit model .......................................... 124
Table 6. 5 Random parameter Tobit model for KSI crash rate ............................. 125
Table 6. 6 Marginal effects results for the refined models ................................... 126
Table 6. 7 Comparison of model performance ..................................................... 132
Table 6. 8 Multivariate Tobit model error parameters and goodness-of-fit ......... 133
Table 6. 9 Results of multivariate Tobit model .................................................... 134
1
Chapter 1 Introduction
1.1 Background of this study
Economic losses attributed to road injuries cost the society around 3% of the national
income. The share of these losses contributed by road crashes involving commercial
vehicles are considerable (Health and Safety Commission, 2001; WHO, 2018). It is
because the crashes involving passengers (e.g. light bus, bus and taxi) and goods vehicles
do not only result in severe injury and death of the convicted drivers, but also those of
other innocent road users including passengers on the vehicles and pedestrians on roads
(Barua and Tay, 2010; Mooren et al., 2014; Meng et al., 2019). In Hong Kong, although
commercial vehicles merely constitute about 20% of total vehicle fleets, they are involved
in over 70% of road crashes. One possible reason may be the high mileages of commercial
vehicles (Transport Department, 2018a; Pei et al., 2012). However, safety of professional
drivers is also of great concern since the rates of professional drivers involved in crashes
and traffic violation are higher, compared to non-professional drivers (Chen et al., 2020;
Öz et al., 2010a; Wong et al., 2008).
The road-based public transportation modes in Hong Kong primarily include a regular
bus mode (operated either publicly or privately), a light bus mode (or mini-bus mode that
typically carries up to 19 passengers, again operated publicly or privately), and taxis
(while the taxi mode may not be traditionally viewed as a public transportation mode, it
is not uncommon in Hong Kong for the use of taxis to access bus stations and rail stations,
making it an integral component of public transportation use in the country). The
substantial dependence on the road-based public transportation modes contribute to, on a
per capita basis, a low vehicle miles of travel (VMT) in Hong Kong. This low exposure,
along with low speeds (due to high vehicle densities) and the protective cushion offered
by large buses, has resulted in a relatively low number of crashes in Hong Kong,
especially those resulting in serious injuries/death. In particular, there were 108 fatalities
and 2,214 individuals seriously injured in road traffic crashes in 2017 (Transport
Department, 2017). Based on a population estimate of about 7.4 million in Hong Kong in
2017, this translates to a per capita fatality rate of 14.6 deaths per million population
2
(relative to, for example, 28 road traffic fatalities per million population in the UK and
107 deaths per million population in the US).
Clearly, Hong Kong’s traffic safety record, at least on a per capita basis, is superior
relative to many other western nations. However, an issue of concern in Hong Kong is
that, unlike many western countries, a vast majority of the vehicles being driven on the
roads are by professional drivers (interestingly, ride-hailing services have yet to be
legalized in Hong Kong, and, as indicated earlier, taxi rides are a common way to access
the road-based public transportation modes, in addition to walking; and taxi drivers are
carefully regulated in terms of licensing requirements). Thus, it is of concern in Hong
Kong that the crash involvement rate of public transport vehicles is seven times higher
than that of the private car (Transport Department, 2017). It certainly brings into spotlight
the safety performance of professional drivers and the licensing regulations in place for
such drivers. While professional driver-related crashes and the organization/travel culture
has been examined at some length in the west and the middle-east (for example, see
Mallia et al., 2015; Newnam et al., 2018; Öz et al., 2010a, 2010b; Rosenbloom and Shahar,
2007), there has been relatively little research into the causes and considerations
associated with professional driver-related crashes in the far-east. This is particularly
surprising, given that professional drivers make up more of the pool of overall drivers in
Hong Kong relative to the west and the middle east. Therefore, such an obvious research
gap existing for the professional drivers motivates us to assess their safety performance
from the perspectives of driving performance, attitudes, and crash risks.
1.1.1 Driving performance of professional drivers
The proportion of older drivers in the transport sector has been increasing because of the
ageing population, shortage of labor and economic incentives (Duke et al., 2010). In Hong
Kong, the percentage of the population aged 60 or above increased from 16.8% in 2008
to 23.6% in 2017 (Census and Statistics Department of HKSAR, 2017). Accordingly, the
percentage of the full driving license holders aged above 60 in Hong Kong increased from
8% in 2008 to 16% in 2017 (Transport Department of HKSAR, 2017). The effect of age
on driving performance is thus of increasing concern. Driving performance is recognized
to be deteriorated with age (Islam and Mannering, 2006; Shanmugaratnam et al., 2010).
3
It in turn increases the associated crash and injury risks (Hole, 2007). Increase in crash
risk of older driver is found to be associated with the degradation in physical, mental and
cognitive conditions of human being (Lundberg et al., 1998). These associations have
been examined using the driving simulator experiments. For example, older drivers
generally show a degraded neuropsychological performance, which is in turn associated
with the degraded lateral control performance (Andrews and Westerman, 2012;
Shanmugaratnam et al., 2010). Also, older drivers perceive greater mental workload from
driving (Cantin et al., 2009), and perform worse at controlling the vehicle simultaneously
than younger drivers (Bélanger et al., 2010). Despite that there is negative correlation
between age and driving performance, professional drivers tend to have better driving
skills since they have more on-road experience. It is controversial that whether the age-
related impairments on driving performance could be offset by the driving experience and
task familiarity of professional drivers (Andrews and Westerman, 2012). On the other
hand, older (non-professional) drivers tend to drive less and the reduction in exposure
could be a more significant factor to crash risk, compared to driving experience and task
familiarity (Tay, 2006, 2008). To our knowledge, the interaction between driver type (i.e.
professional driver or not) and age on the driving performance is still unclear, and
therefore it is of our great interest.
1.1.2 Attitudes and behaviours of professional drivers
Driver aggressiveness and prevalence of traffic offences are identified to be the factors
contributing to crashes involving professional drivers (Rosenbloom et al., 2007; Öz et al.,
2010a). It could be attributed to the fact that professional drivers have to withstand high
work and time pressure due to their job nature (Öz et al., 2013). More importantly,
professional drivers deliberate over the trade-off between traffic offence-penalties and
potential income (Rosenbloom et al., 2007). Yet, the attitude of professional driver could
be controversial. Studies also suggest that professional drivers show a high intention to
avoid risky behaviours due to the perceived social responsibility (Rohani et al., 2013;
Shams et al., 2011). In this case, research is urgently needed to better understand the
perceptions and attitudes of professional drivers towards traffic offences and therefore to
tackle the problem of their impaired safety performance.
4
1.1.3 Crash risk of commercial vehicles
Commercial vehicles in Hong Kong presented higher crash involvement rates over the
years, as compared with private cars (Transport Department, 2018a). Previous studies
reveal that increase in the overall proportion of commercial vehicle is associated with the
increases in severe crashes on motorways and at signalized intersections (Wong et al.,
2007; Xu et al., 2014). Despite that the significance of mixed traffic situation on road
safety performance has been established by earlier research (Dinu and Veeraragavan,
2011; Srinivas et al., 2007), study limitation comes from the availability of elaborated
traffic data for the proportions of various commercial vehicle types. Nevertheless, a recent
study found that increases in the proportion of private cars, as well as that of the medium
trucks, are associated with the increase in injury crashes on highway segments (Wen et
al., 2018). As such, taking the advantage of more detailed breakdown of the proportions
of various commercial vehicle types, this study aims to shed light on the safety effects of
the composition of commercial vehicles. On the other hand, numerous studies have
proposed a need to model crashes by type (e.g. injury severity, collision type,
transportation mode, road users), as the effects of risk factors vary across crash types
(Guo et al., 2019; Ulak et al., 2018; Wang et al., 2017; Lee et al., 2015). However, studies
considering the crashes by vehicle type have been so far scanty. The only study
simultaneously estimating crashes by vehicle type (larger trucks and passenger cars) was
by Dong et al. (2014), suggesting that understanding the effects of geometric factors on
crash frequencies by vehicle type is of significance. In order to develop effective safety
measures for different commercial vehicles, identifying possible risk factors to crashes of
different vehicle types is therefore a must.
This study attempts to assess safety of professional drivers from the behavioural,
psychological, and empirical perspectives. Five research questions are therefore proposed
here: 1) whether age-related impairments on driving performance can be reduced by the
driving experience and task familiarity of professional drivers, 2) whether the
compensatory strategies of older drivers are different between professional and non-
professional drivers, 3) how the penalty and enforcement strategies deter professional
drivers from traffic violations, 4) whether the relationship between commercial vehicle
5
proportions and crashes can be moderated by roadway attributes, and 5) whether the
effects of risk factors vary across crashes categorized by vehicle type.
1.2 Research aims and objectives
This study aims to assess safety of professional drivers in Hong Kong from the
behavioural, psychological, and empirical perspectives. It is of great importance to assess
the driving performance of professional drivers, to evaluate their attitudes towards
legislation and law enforcement, to investigate the safety effects of commercial vehicle
mix, and to identify risk factors across crashes by vehicle type. Driving simulator
experiments, perception survey, and crash risk analysis are employed to achieve the aim.
The specific objectives of this study are as follows:
1) Driving performance
⚫ To examine the effects of driving time, age, traffic condition and road environment
on the driving performance of professional drivers, with which the difference in the
driving performance between professional and non-professional drivers is considered.
⚫ To evaluate effects of driving time, age and traffic condition on driver’s conflict risk
using surrogate safety measures, with the concern of difference between professional
and non-professional drivers.
⚫ To explore the relationship between traffic conflict risk and compensatory behaviour
of professional drivers
2) Perception evaluation
⚫ To investigate the perceptions and attitudes of professional drivers towards the
enforcement and penalties using a stated preference survey approach.
3) Crash risk analysis
⚫ To measure the association between the commercial vehicle proportion and crash rate
and to examine the mediating (moderating or magnifying) effects of roadway
attributes on this association.
6
⚫ To measure the relationships between possible risk factors and the crash rates of
different vehicle types using multivariate approach, with which correlations between
crash rates across vehicle types are considered.
It is expected that findings from this study would support the decision making of transport
operators regarding the driver recruitment and management, enhance the current
understanding and effectiveness of penalties and speed-enforcement strategies, and
provide useful insights into relevant countermeasures (that can enhance the safety culture
and awareness of professional drivers and crashworthiness of commercial vehicles).
Therefore, safety performance of professional drivers can be improved in the long run.
1.3 Thesis organization
Chapter 2 reviews the literature on various aspects of driver safety studies, including
driving performance and behaviours, driver perception and attitudes, as well as the crash
risk of commercial vehicles.
Chapter 3 assesses the driving performance of professional drivers using a driving
simulator study. Effects of driving time, age, traffic condition and road environment on
the driver’s speed, lateral and steering control performances are revealed. Difference in
contributory factors to driving performance between professional and non-professional
drivers is discussed. Interaction between age-related impairments on driving performance
and task familiarity of professional drivers is also explored.
Chapter 4 focuses on the professional drivers’ traffic conflict risk. Two surrogate safety
measures: time exposed time-to-collision (TET) and time integrated time-to-collision
(TIT) are adopted to indicate the risk of more severe rear-end traffic conflict in the car-
following tasks. Other performance indicators include the brake reaction time (BRT),
lateral control, average driving speed, and time headway. A driving simulator study is
used to evaluate the effects of driving time, age, and traffic condition on the risk of rear-
end conflict. Furthermore, relationship between traffic conflict risk and compensatory
behaviour of professional drivers is discussed.
7
Chapter 5 investigates the perceptions and attitudes of professional drivers towards the
enforcement and penalties in Hong Kong to deter speeding. A stated preference survey is
used to gauge the trade-offs among enforcement strategies, penalty levels and speed
choice of the professional drivers. Also, effects of factors including driver demographic,
socioeconomics, driving experience and crash record are considered.
Chapter 6 measures the relationship between the proportions of different commercial
vehicle types and the overall crash rates by injury severity, with which the confounding
factors including road geometry, traffic control and time period are considered. Also, risk
factors affecting the crash risks of different vehicle types are identified using multivariate
analysis, which accommodates possible correlations between crash rates across vehicle
types.
Chapter 7 concludes the study with a summary of the findings, implications, limitations,
and future research directions.
8
Chapter 2 Literature review
This chapter reviews the literature on driver safety from the behavioural, psychological,
and empirical perspectives. Section 2.1 discusses the driving performance of professional
drivers, contributory factors to driving performance, compensatory driving, and the
indicators that commonly used to measure the performance. Section 2.2 reviews the
literature with respect to drivers’ perceptions, attitudes, and behaviours. Previous findings
regarding the attitudes and behaviours of professional drivers and elderly drivers are
presented first. Then, drivers’ perceptions towards traffic legislation including penalty
and enforcement are discussed. Lastly, Section 2.3 reviews the crash risks of commercial
vehicles, safety effects of the percentages of various commercial vehicle types, and
crashes modelled by types.
2.1 Driving performance
2.1.1 Driving performance of professional drivers
Hong Kong is a city with high population density and limited road space. The ability of
public transport to serve high density cities well, as well as the relatively high costs of
private vehicle ownership and high operational costs (especially parking costs) resulting
from the limited road space, has resulted, in Hong Kong, in the dominance of public
transport as the primary mode for work-related as well as non-work travel. Of particular
note is the relatively seamless integration of road-based and rail-based metro public
transportation services in Hong Kong, with transfers between the two broad modes of
public transportation commonplace. Overall, over 90% of commute trips as well as over
46 % of non-commute trips in the territory are undertaken by road-based and/or rail-based
public transport (Transport and Housing Bureau, 2017; Transport Department, 2014).
However, crash involvement rates (per million vehicle-km) of commercial vehicles,
particularly taxi, light bus and bus, are higher than that of the private car in Hong Kong
(Transport Department of HKSAR, 2017). It certainly brings into spotlight the safety
performance of professional drivers.
9
Indeed, driving under the influence of fatigue has been a significant safety issue (Bunn et
al., 2005; Duke et al., 2010; Rosenbloom and Shahar, 2007). Professional drivers are more
vulnerable to the fatigue as they have to drive for longer time, as compared to the general
drivers. Also, aggressive driving behavior (attributed to desire for higher revenue and
expectation from the customers/employers) can contribute to higher crash rates
(Matthews et al., 1999; Sullman et al., 2002; Kontogiannis, 2006, Öz et al., 2010a). In
addition, increase in the exposure of professional drivers is also associated with the
increase in crash involvement rate. Regarding the difference in the behaviors between
professional and non-professional drivers, one possible factor is the vehicle ownership.
Professional driver who does not own the vehicle may have a higher propensity of
committing convicted driving behavior. Hence, moral hazard may occur since the driver
(who is not the owner) has less incentive to avoid any risky event (Tay and Choi, 2016).
However, professional drivers are believed to have better driving skills (Andrews and
Westerman, 2012; Borowsky and Oron-Gilad, 2013). It is therefore crucial to assess the
driving performance of professional drivers (i.e. whether it is better than that of non-
professional drivers), and the possible contributory factors.
Moreover, ageing population is now a common problem faced by many countries or
regions because of the reduction in fertility rates and increased life expectancy. By 2035,
proportion of population of age above 65 in Hong Kong would reach 25% (Sze and
Christensen, 2017). In recent years, of the peoples who hold the valid driving licenses,
percentage of elderly has been increasingly rapidly in other ageing societies (Newman et
al., 2018, 2019). In Hong Kong, proportion of drivers who held valid public transport
vehicle (e.g. taxi, light bus and bus) driving license of age above 60 was 37-46% in 2017
(Lee, 2018). Prevalence of older drivers in the transport industry can be attributed to the
issues including labour shortage, lack of social welfare and seeking of social engagement
(Duke et al., 2010; Navarro et al., 2007). However, it was recognized that cognitive
performance could be deteriorated when driver age increased, and the potential crash risk
of elderly driver could be higher than that of the younger counterpart (Hole, 2007; Islam
et al, 2006; Shanmugaratnam et al., 2010). Performance deterioration of older drivers can
be the results of audio and visual loss and extended perception-reaction time (Yan et al.,
2005; Yan and Radwan, 2006). However, the impacts on road safety because of the ageing
10
population and prevalence of older drivers in the transport sector have not been
thoroughly investigated.
2.1.2 Risk compensation and driving performance
Despite of the age-related deterioration, some older drivers, especially the professional
drivers who spend more time on roads, can still demonstrate satisfactory driving
performance. Then, no evidence can be established for the elevated crash risk of older
drivers in some studies (Braitman et al., 2007; Langford et al., 2006). Additionally,
satisfactory driving performance of older drivers could be attributed to self-regulation.
Older drivers might drive more cautiously and avoid driving under the adverse conditions,
such as traffic congestion, peak hours, high speed roads, bad weather and poor visibility
conditions. Modification of driving behavior that offsets the perceived risk attributed to
deteriorated physiological, cognitive and driving performances is known as compensatory
strategy (Lyman et al., 2001). Compensatory strategies are prevalent for older drivers who
had known cognitive impairment, traffic violations and crash involvement records
(Charlton et al., 2006; Molnar et al., 2008). For instances, older drivers may drive at a
lower speed, maintain a longer headway with leading vehicle, and avoid complicated
roads and maneuvers (Andrews and Westerman, 2012; Merat et al., 2005). Hence, the
potential crash risk of older drivers could be reduced by the compensatory strategies (De
Raedt et al., 2000; Molnar et al., 2008).
Moreover, professional drivers have higher capability to identify road hazards, and a brief
perception training intervention can improve the hazard perception skills of such
experienced drivers (Borowsky and Oron-Gilad, 2013; Li et al., 2015). Also, professional
drivers can have better risk anticipation and quicker response to potential road hazards
(Damm et al., 2011; De Craen et al., 2008). Consider the above, it is necessary to evaluate
the difference in the compensatory strategies between older professional and non-
professional drivers.
On the other hand, fatigue is one of the leading causes of crashes involving professional
drivers (Duke et al., 2010; Meng et al., 2015). Professional drivers often need to drive for
long distance and extended period per trip and/or per day (Öz et al., 2010a; Williamson
11
and Boufous, 2007). Additionally, fatigue can also increase the risk of fatality and severe
injury of professional drivers (Bunn et al., 2005). However, some researchers argued that
drivers could self-detect the occurrence of fatigue, and accommodate the impairment
while driving (Filtness et al., 2012; Williamson et al., 2014; Meng et al., 2015). For
example, drivers would slow down when they feel tired to mitigate the potential crash
risk attributed to driving under the influence of fatigue (Williamson et al., 2002). Strategic
adaptation refers to the intentional modification of driving behavior to adapt for the
impairment or driving under the influence of distraction, therefore driving and safety
performance can be optimized. Considered the experience in prolonged driving and high-
demand situations, it is expected that strategic adaptation of professional drivers is more
prevalent, and the elevated crash risk of professional drivers after prolonged driving can
be marginal.
2.1.3 Driving performance indicators
Driving simulator experiment is a safe and cost-effective approach to evaluate the driving
performance. In particular, the effects of road design and traffic condition on the driving
performance could be assessed in a controlled manner (Boyle et al., 2010; Lee et al.,
2003). Using a driving simulator, Otmani et al. (2005) found that sleepiness of male
professional drivers increases over time during the 90-min simulated driving task.
Consistently, Oron and Ronen (2007) indicated that fatigue of truck drivers was detected
through their degraded steering performance over time. Indeed, fatigue impaired driver’s
capability in terms of vehicle control and collision avoidance through withdrawing
driver's attention to the road and traffic condition progressively (Brown, 1994).
Measures of driving performance are commonly used to detect driver’s fatigue or
alertness (Brookhuis and De Waard, 1993; Brown, 1997). For example, the impaired
lateral control of the vehicle was revealed strongly associated with the driver fatigue
resulted from prolonged driving (Van der Hulst et al., 2001; Boyle et al., 2008). Standard
deviation of vehicle speed (SD-SPEED), standard deviation of the lateral position
(SDLP), standard deviation of steering wheel angle (SDSWA) reflect driver’s
longitudinal, lateral and steering control of the vehicle, which have been frequently
12
adopted in simulator studies (Boyle et al., 2008; Cantin et al., 2009; Shanmugaratnam et
al., 2010; Li et al., 2016).
In addition to conventional driving performance indicators, traffic conflict, as a road
safety surrogate measure, provides rich information for road safety assessment. A traffic
conflict was defined as “… an observable situation in which two or more road users
approach each other in space and time to such an extent that there is a risk of collision if
their movements remain unchanged” (Hydén, 1987). It has been revealed that driving
simulator could be an efficient alternative for traffic conflict analysis (Chang et al., 2019;
Yan et al., 2008). Using a driving simulator, near-departure events of drivers could be
identified based on the corresponding thresholds of the selected indicators (e.g. lateral
distance to departure, time to departure). Then, the expected number of lane departures
could be estimated (Tarko, 2012). On the other hand, critical events (e.g. pedestrian
crossing; car incursion; sudden brake by the leading vehicle) can be incorporated into the
driving simulator experiment to assess the driver performance (Andrews Westerman,
2012; Bélanger et al., 2010). Meanwhile, the effects of driver characteristics on the driving
performance during the critical situations can be evaluated. For example, elderly drivers
tend to show impairments on driving performance when facing a challenging event that
required synchronous reactions (Bélanger et al., 2010).
Time to collision (TTC) is one of the most widely used conflict indicators. It is defined as
the time left before two vehicles collide when there is no evasive maneuver to avoid a
collision (Hayward, 1972). The minimum TTC (TTC
min
) value is the shortest time span
required for a driver’s perception and reaction to prevent a collision from happening.
TTC
min
can be used to distinguish the conflict events once it is less than the predetermined
threshold (i.e. 1.0 s to 5.0 s) (Autey et al., 2012; Sayed et al., 2013; Zheng et al., 2014).
Time exposed time-to-collision (TET) and time integrated time-to-collision (TIT) are two
modified indicators based on TTC. When using TET and TIT for safety analysis, a TTC
threshold should be selected to differentiate the critical conditions from the safe
conditions. TET is defined as “… a summation of all moments (over the considered time
period) that a driver approaches a front vehicle with a TTC value below the threshold value
TTC” (Minderhoud and Bovy, 2001). In other words, TET reflects the duration of safety-
13
critical situation, given that the TTC values are lower than the threshold. TIT is defined as
“… uses the integral of the TTC profile of drivers to express the level of safety (in s
2
)”
(Minderhoud and Bovy, 2001). TIT considers both the duration of safety-critical situation
and the absolute difference between TTC value and the threshold. Other common conflict
indicators include post encroachment time (Cooper 1984), time to accident (Hydén 1987),
headway (Vogel 2003), braking time (Lu et al. 2012), etc.
2.2 Perceptions, attitudes, and behaviours
2.2.1 Attitudes and behaviours of professional drivers
A driver’s crash risk was revealed to be correlated with his/her perceived stress caused by
the road traffic (Matthews et al., 1999). Professional drivers are more likely to experience
driver stress, which contributes to the prevalence of driving aggression and traffic violation
(Öz et al., 2010a; Kontogiannis, 2006; Westerman and Haigney, 2000). Wong et al. (2008)
revealed that minibus drivers in Hong Kong tend to drive aggressively and violate traffic
rules due to the keen market competition. Machin and De Souza (2004) also found that
taxi drivers with aggressive personality reported more frequent risky behaviors. Sullman
et al (2002) examined the relationship between aberrant driving behaviors (including three
categories, i.e. error, lapse and violation) and crash involvement of truck drivers in New
Zealand. Results suggest that violation behavior of truck drivers was the only significant
predictor to their crash involvements.
Indeed, compared with non-professional drivers, risky driving behaviors are more
prevalent among professional drivers. One possible reason is the difference in risk
perception between professional and non-professional drivers. Due to the higher exposure
on roads, professional drivers are more familiar with the traffic hazards and therefore
perceive certain situations less risky (Öz et al., 2010a). Rosenbloom and Shahar (2007)
reported that professional drivers may sometimes regard committing minor offences as a
possible way to increase their income. For example, professional drivers may earn more
money by driving faster or stopping in restricted area to pick up more passengers. As a
result, professional drivers are often caught by minor traffic offences. However,
14
professional drivers are less likely to commit egregious risky behaviors (e.g. drink driving,
drug driving) than the non-professional drivers (Knipling et al., 2004), which could be
attributed to their greater sense of social responsibility (Paleti et al., 2010).
Referring to the theory of planned behavior (TPB) (Ajzen, 1991), attitude, subjective
norms, and perceived control are the three factors that determine the behavioral intentions.
While the behavioral intention is the best predictor of a person’s behavior. TPB has been
widely used to explain and predict human behaviors including driver and pedestrian
behaviors (Poulter et al., 2008). Applying the TPB model, Newnam et al. (2004) found
that drivers show lower speeding intention when driving a work vehicle compared with
his/her personal vehicle. This could be explained by the difference in subjective norms
(that is, attitudes of important others towards his/her behavior) between driving the work
vehicle and personal vehicle. It is suggested that subjective norms could have significant
effects on driver behavior particularly in a work environment. In addition, factor of
perceived control is revealed to affect the law-abiding behaviors of drivers. For example,
truck drivers are found more likely to comply with traffic regulations when they perceive
greater controllability over the work.
Moreover, professional drivers are usually regular employees of an organization, such as
logistic firms or bus companies. It is found that safety culture of the organization
significantly affects the attitudes of professional drivers towards risky driving (Öz et al.,
2010b, 2014). This could be attributed to the company’s driver management system. For
example, penalties would be issued to the drivers in accordance with the safety driving
policy because of their risky behaviors. In Hong Kong, the public bus companies
encourage the bus drivers to meet the driving safety requirements with monetary bonus.
While others who have the record of risky driving may need to attend additional training
and counseling courses. As a result, the organizational safety climate would help lower the
drivers’ intention to commit risky driving (Newnam et al., 2004).
2.2.2 Effect of driver age on attitudes and behaviours
Driving behavior can be predicted by attitudes (Ajzen, 1991), while risk perception
directly affect road safety attitude (Ram and Chand, 2016). Rosenbloom et al. (2008)
15
indicated that older drivers perceive higher risk while driving, which contributes to their
cautious and careful behaviors (Ram and Chand, 2016). Consistently, Tseng (2013) found
that elderly drivers tend to drive in a cautious and law-abiding manner. For example, they
are less likely to commit speeding violations compared with younger drivers. In addition,
involvements of aggressive driving were reported to decrease as the driver age increases
(Sullman et al., 2002).
Moreover, avoidance behaviour is found prevalent among elderly drivers (De Raedt and
Ponjaert-Kristoffersen, 2000; Molnar et al., 2008). For example, previous studies
revealed that elderly drivers tend to avoid driving under heavy-traffic condition, in peak
hours, on expressways, under the adverse weather and at night (Abdel-aty et al., 1998;
Ball et al., 1998; Charlton et al., 2006; Molnar et al., 2008). This is because they try to
adjust their exposure for a satisfactory driving performance or a lower crash risk
(Langford et al., 2006; Lyman et al., 2001). Besides, elderly drivers who are aware of
their functional and cognitive impairments often accommodate the driving task by
modifying driving behaviour (Lyman et al., 2001). For example, they tend to drive at a
lower speed or keep a longer headway with the vehicle in front to ameliorate their crash
risk (Ni et al., 2010; Shinar et al., 2005).
2.2.3 Driver’s perception towards traffic legislation
Earlier studies in other regions of the world, such as those referenced earlier, suggest that
driver aggressiveness, caused by high work and time pressure and resulting in a trade-off
deliberation between traffic offence-penalties and potential income gains from saved time
in the face of congested travel conditions, contribute to the high crash risk of professional
drivers (Öz et al., 2010a; Rosenbloom and Shahar, 2007). In particular, speeding has been
identified as a common aggressive driving behavior exhibited by professional drivers,
and speeding has also been identified in many earlier studies as being the single most
important factor impacting the occurrence and severity of roadway traffic crashes
(Fitzpatrick et al., 2017; Watson et al., 2015; WHO, 2018). In this context, in some OECD
countries, the proportion of drivers who self-report being guilty of excessive speeding is
as high as 80% (WHO, 2018). The same situation manifests itself in Hong Kong, with
speeding being one of the most common recorded traffic offences among professional
16
drivers and drivers at large. According to the number of prosecutions against traffic
offences in 2017, speeding accounted for over 42%, while red light running and drunk
driving accounted for 13% and 0.17% of the total number of prosecutions in Hong Kong,
respectively (Hong Kong Police Force, 2018). Admittedly, these statistics from Hong
Kong do not necessarily reflect the relative prevalence of speeding compared to other
illegal driving behaviors, because the statistics may simply be an indication of the type
and intensity of resources dedicated to enforcing speed limits relative to other illegal
driving behaviors. Even so, the very fact that more investment is made in preventing
speeding relative to other behaviors is in and of itself an acknowledgment that
countermeasures aimed at speed reduction are considered one of the most cost-effective
ways to enhance traffic safety.
Monetary fine, driving disqualification and imprisonment are the common penalties to
address and reduce speeding offence occurrences (as well as other driving offences; see
Hössinger and Berger, 2012; Li et al., 2014). In Hong Kong, the Driving-offence Points
(DOPs) system was introduced in 1984. Over 50 items of traffic offences carry DOPs in
addition to a monetary penalty. As would be logical, more DOPs and higher monetary
fines are issued as the level of speeding increases. Thus, a severe speeding offence (excess
of speed limit by more than 30 km/h but less than or equal to 45 km/h) incurs five DOPs
and HK$ 600 penalty (Transport Department, 2018b). Under this DOP system, persons
who have incurred 15 points or more within two years are disqualified from driving.
Some previous studies have revealed a significant negative correlation between the
monetary fine level imposed and penalty points, and the occurrence of traffic offences
(Hössinger and Berger, 2012; Li et al., 2014; Wong et al., 2008). For example, an increase
of fine by 10 Euros is associated with the reduction in speeding frequency by 5% among
Austrian drivers (Hössinger and Berger, 2012). However, there are studies suggesting that
monetary fine levels and penalty points alone have only a relatively minor deterrent effect
on the speeding offence (Elvik and Christensen, 2007; Fleiter et al., 2010; Langlais, 2008;
Ritchey and Nicholson-Crotty, 2011; Sagberg and Ingebrigtsen, 2018). Specifically, these
studies raise the issue of not only the level of the penalty on speeding deterrence, but the
risk of being subjected to that penalty (Kergoat et al., 2017; Li et al., 2014; Tay, 2009).
17
That is, the propensity for speeding depends on both the level of penalty as well as the
prevalence of speed enforcement operations, with some studies finding that the latter is
much more effective in curbing speeding offences than the former (see, for example,
Gargoum and El-Basyouny, 2018; Lawpoolsri et al., 2007; Ryeng, 2012; Truelove et al.,
2017). In other words, fines and DOPs penalty, according to these earlier studies, do not
function very well when the level of speed enforcement is not adequate (and thus the risk
of being subjected to the penalties is low). This finding also has backing in criminal
justice-based deterrence theory (Gibbs, 1985), which stems from the notion that
individuals effectively undertake a cost-benefit analysis of pursuing a “crime”, and the
effectiveness of a dissuasive mechanism originates from the costs being perceived as
higher than the benefits. The cost-benefit analysis itself is conducted within a frame of
three criteria: the certainty, celerity (swiftness or rapidity of imposition), and the severity
of a sanction. While the relative contributions of these three criteria may vary based on
the crime under question, lower “crime” activities (at least as viewed traditionally by
society, such as illegal driving behaviors) are typically dominated by the “certainty of
being apprehended” criterion in the cost-benefit evaluation of individuals (Høye, 2014;
Watson et al., 2015). In the context of speeding, this “certainty” criterion is directly
related to the level of enforcement of speed limits.
The automated speed enforcement camera (ASEC) system is generally considered as a
promising and cost-effective enforcement technique that increases the certainty of being
apprehended if speeding (Carnis and Blais, 2013; De Pauw et al., 2014a; Tay, 2009).
Once the cameras are installed, such systems obviate the need for more costly human
police patrols along roadways. Of course, some studies suggest that human police patrols
are still effective, when combined with ASEC systems, because many drivers feel
embarrassed when confronted by a fellow human (that is, a police person) who is
perceived as passing a judgment on one’s societal conduct. In addition, the fear of a verbal
reprimand by the police also can add to the embarrassment factor, elevating the
cumulative cost of being detained by a human police to be even higher than the fear of
risking one’s life or that of others through speeding (Kergoat et al., 2017; Silcock et al.,
2000). But drivers also understand that human agents, even if equipped with hand-held
radar/laser speed guns that provide accurate and reliable readings, can get fatigued over

18
long periods of time in terms of holding and directing the speed guns in appropriate
directions, and cannot have a consistent level of vigilance over extended periods of time,
leading to speeding event “misses” (see Kergoat et al., 2017). On the other hand, properly
functioning ASEC systems are more reliable in detecting speeding violations over
extended stretches of time. Even so, there is the issue of driver ability to dodge the dangers
posed by spatially fixed ASEC systems (that is, an ASEC with overtly announced camera
locations, as opposed to covert or unpublicized camera locations). In particular, according
to the integrative social-cognitive protection-motivation theory (PMT) (see Rogers,
1983), the effectiveness of a “threat” (that is, a speed enforcement mechanism in the
context of roadway speeding) is based both on threat appraisal (by way of the certainty,
celerity, and severity, as proposed by deterrence theory) as well as coping appraisal (that
is, the ability to cope with and dodge the danger). As an individual’s self-efficacy (the
ability to perform an action needed to dodge a threat) and the response efficacy (the
efficacy of the response to actually dodge the danger) increase, there will be less incentive
to not commit an offence based on a positive coping appraisal.
In the context of a spatially fixed ASEC systems, drivers typically perceive more
controllability and a positive coping appraisal (that is, a higher belief that they have the
capability to effectively dodge the speeding enforcement threat) by simply reducing
speeds in the immediate vicinity of the camera locations. This so-called “kangaroo effect”
(abrupt reductions close to camera locations and abrupt speed jumps upstream and
downstream of locations relatively removed from the camera range) has been well-
identified in earlier studies (De Pauw et al., 2014a, 2014b; Elvik, 1997; Marciano et al.,
2015). On the other hand, previous studies (see, for example, Cameron et al., 2003;
Dowling and Holloman, 2008) have shown the higher effectiveness of covert (or
unmarked and unpublicized) ASEC systems relative to fixed ASEC systems because of a
lower coping appraisal and higher uncontrollability to dodge a threat on the part of
drivers. However, such covert ASEC systems are not legally allowed in Hong Kong and
many other countries, both due to privacy regulations as well as the notion that ASEC
systems should be fundamentally aimed at preventing speeding rather than apprehending
offenders (Høye, 2014).
19
2.3 Crash risk analysis
2.3.1 Effects of road environment on crash risk
Environmental factors including road type and traffic flow condition are revealed to affect
the association between crash and possible risk factors. For examples, sleep-related road
crashes are more prevalent on the motorways, as compared to the urban roads (Horne and
Reyner, 1999; Maycock, 1996). Crash risks on the rural roads are also higher than that on
the urban roads because of the monotonous road environments and limited stimuli on
roads (Blower et al., 1993). For the traffic flow condition, increase in traffic volume and
presence of moderate traffic congestion are associated with the reduction in crash risk and
crash severity (Martin, 2002; Yau, 2004). The association between road environment,
traffic flow condition and crash risk could be attributed to the variation in driving
performance across different environments. For instances, variation in the steering and
lateral stability are associated with the complexity of driving task (e.g. reduced horizontal
and vertical curvatures, traffic interactions and roadside stimuli) (Thiffault and Bergeron,
2003; Jamson and Merat, 2005; Arnedt et al., 2005; Boyle et al. 2008; Teh et al., 2014).
Several studies have discussed the relationships between road lane width and crash
frequency and severity (Chen et al., 2017a; Wu et al., 2015; Pei et al., 2012; Gross and
Jovanis, 2007). Park et al. (2012) and Chen et al. (2017b) determined the extent to which
the traffic lane width, within a certain standard range, correlates negatively with the
frequency of different crash patterns or severity levels. An increase in the lane width by
1 ft could result in a 2% decrease in crash frequency (Abdel-Rahim and Sonnen, 2012).
Therefore, wider lanes generally promote vehicle safety. A few studies suggested that
beyond a certain limit, an increase in total traffic road width could possibly increase the
crash risk (Mohamed et al., 2013). Tulu et al. (2015, 2013) explained that this could be
due to the effects of lane width on drivers’ perception and driving speed.
With regard to the effect of road alignment, an increase in horizontal curve density is
revealed to be correlated to fewer casualties in previous research (Lamptey, 2004; Labi,
2011). A few past studies for major roads in Hong Kong had found little or no evidence
of relationships between road curvature and crash frequency (Zeng et al., 2016; Pei et al.,
20
2016, 2012), while Elvik (2019) indicated that increased number of curves for the road
segment could lower the crash rate.
2.3.2 Crash risks of commercial vehicles
In Hong Kong, over 46 % of non-commute trips and 90% of commute trips are made by
public transport. In particular, over 60% of public transport are road-based. They include
buses, light buses, and taxis (Transport and Housing Bureau, 2017; Transport
Department, 2014). This can be attributed to limited parking infrastructure, high density
development, high burden of private car ownership, and more importantly, availability of
economical, efficient and reliable public transport services (Chen et al., 2020). On the
other hand, as an important entrepot in Asia, freight logistics industry constituted to 3.2%
of Hong Kong’s GDP, provided more than 180,000 job opportunities, and accounted for
29% of service export in 2017 (Hong Kong Trade Development Council, 2019). The long-
term economic development, to a certain extent, depends upon the efficient and safety
movements of passengers and goods on Hong Kong roads.
Commercial vehicles in Hong Kong (including buses, light buses, taxis, goods vehicles)
merely constitute about 20% of total vehicle fleets. However, they are involved in more
than 70% of road crashes. This could be attributed to the higher exposure of commercial
vehicles on roads (Pei et al., 2012). On the other hand, safety of professional drivers
should be of great concern. Previous studies indicate that professional drivers tend to
involve in more road crashes and traffic violations compared with non-professional
drivers (Chen et al., 2020; Öz et al., 2010; Wong et al., 2008). In particular, crash
involvement of taxi drivers was positively associated with the increase in driver
workload, driving hours, and more aggressive driving behavior (Wang et al., 2019a,
2019b). Additionally, elevated crash risk of taxi was associated with the ageing of taxi
drivers, which their performances were more likely impaired by the deteriorating health,
fatigue and distraction (Chen et al., 2019a; Meng et al., 2017).
In Hong Kong, franchised bus and public light bus constituted to 49% and 24% of overall
road-based public transport patronage (Transport Department, 2014). Bus drivers are
usually more risk averse since they usually have stronger sense of social responsibility.
21
Also, they have lower tendency to commit traffic offense because of the better safety
management of operators (Paleti et al., 2010; Chen et al., 2020; Öz et al., 2010, 2013).
For example, all franchised bus companies in Hong Kong have comprehensive driver
surveillance, reward and penalty system to deter against speeding and other driving
offences and increase the safety awareness of bus drivers. However, safety of public light
bus has been of major concern in Hong Kong. Public light bus drivers are usually self-
employed, and their salaries are trip-based. They are more aggressive and are likely to
commit various driving offenses to compete for the business (Wong et al., 2008). Hence,
fatal and severe crash risk of public light bus-related crash is higher than that of franchised
bus (Transport Department, 2017a).
Goods vehicles in Hong Kong are classified into three categories - light, medium and
heavy, depending on the weight and dimensions. Light goods vehicle (also known as
‘light van’) drivers are self-employed and their salaries are trip-based, and medium and
heavy goods vehicle drivers are usually employed by the logistic firms and their salaries
are monthly or daily-based. Indeed, employment type can also affect the drivers’ attitudes
and behaviors. Light van drivers are usually more aggressive (Chen et al., 2020). Studies
also indicated that number of light trucks is positively associated with overall fatal crash
and pedestrian fatalities and severe injuries (Ballesteros et al. 2004; Desapriya et al.,
2010). Moreover, road environments and working conditions also affect the driving
performance of goods vehicle drivers. Driving under the influence of fatigue is prevalent
when a light goods vehicle driver is exposed to congested urban traffic environment for
extended period. In contrast, driving fatigue is prevalent when a heavy goods vehicle
driver is driving on monotonous rural highway (Friswell and Williamson, 2013). It is
necessary to estimate the effects of driver characteristics, road environment, traffic
condition and time period on the commercial vehicle crash risk. Therefore, effective
driver education and training programs can be introduced to enhance the safety awareness
and thus reduce the crash risk of commercial vehicle drivers.
2.3.3 Effect of commercial vehicle mix
The commercial vehicle proportion (CVP) refers to the ratio of commercial vehicles to
all vehicles in the traffic stream. Previous studies indicate that the relationship between
22
commercial vehicle proportion and crashes is influenced by the class of commercial
vehicle in question (Tay, 2003; Ballesteros et al., 2004; Desapriya et al., 2010).
Furthermore, even for a given class of commercial vehicles, it has been determined that
the direction of the effect of vehicle proportion on crash rate can vary with the roadway
feature type and crash severity level. For example, with regard to buses, Dinu and
Veeraragavan (2011) found that an increase in their proportion is associated with an
increase in night-time highway crashes, while Xu et al. (2014) determined that an increase
in the bus proportion is associated with a decrease in slight-injury crashes at intersections.
With regard to trucks, Wen et al. (2018) indicated that an increase in truck proportion is
associated with an increase in injury crashes at road segments, while Dinu and
Veeraragavan (2011) found that an increase in truck proportion is associated with a
decrease in night-time crashes. Dong et al. (2014) revealed that an increase in the
percentage of heavy trucks in traffic stream is associated with the increase in intersection
crashes.
It is interesting to note in the literature that a number of studies have used commercial
vehicle data to develop indicators of potential crash risk, and have discussed the policy
implications of doing this (Bao et al., 2019; Zhou and Zhang, 2019). Bao et al. (2019)
found that the spatial distribution of taxi trips exhibits a similar pattern with that of
crashes, and that locations with higher density of taxi trips are positively correlated with
those with high daytime crashes. However, the authors emphasized that the relationship
between taxi trips and crashes is non-monotonic, meaning that it can be moderated by
other environmental factors such as weather and land-use variables.
Indeed, the argument for the need to investigate the moderating effects of road attributes
on the CVP-crash relationship is rooted in the longstanding realization that the roadway
environment (physical and operational) profoundly influences the crash experience
(Zegeer at al., 1988; Hauer, 1988; Dumbaugh, 2006; Gross and Jovanis, 2007). Recently,
there has been research efforts that have thrown more light on the safety effects of road
environment features including geometric characteristics, ambient natural factors, the
nature of traffic flow, and types of traffic control facilities (Chen S. et al., 2019a; Zeng et
al., 2016, 2017b; Sze et al., 2019; Álvarez et al., 2020).
23
Interaction is present where two or more objects have an effect upon one another. In a
statistical model, an interaction is a term in which the effect of two (or more) variables is
not additive. In other words, the effect of factor A plus the effect of factor B is different
than the effect of factors A and B combined. Therefore, interaction effects refer to the
modification of the effect of one independent variable on the dependent variable due to
the presence of a second independent variable. Such modification may be a diminished
or mitigating effect (moderation) or an exacerbated effect (magnified). Failure to account
for such interaction effects could lead to poor model performance.
A large number of past research studies have addressed interactions between various road
crash factors without explicitly identifying or explaining any moderating or magnifying
effects of the interacting variables. Ahmed et al. (2012) indicated that the positive
association between steep grades and mountainous freeway crashes is magnified
significantly in the snow season, suggesting that the interaction of road geometry and
weather condition has a significant effect on crashes. Wen et al. (2019) found that an
increase in roadway vertical gradient generally contributes to reduced highway crashes;
however, the interactions between vertical gradient and weather variables (such as wind
speed and visibility) was found to have positive coefficients, suggesting that increase in
crash propensity with increased interaction (of vertical gradient, wind speed, and poor
visibility) which is intuitive. It seems clear that introducing interaction terms in a crash
prediction model indeed has several benefits including improvement of the model’s
goodness-of-fit and intuitiveness, identification of potential sources of heterogeneity
(Azimi et al., 2020), and quantification of the moderating effects of the roadway
environment on the relationships between crash frequency and any specific crash factor.
The conclusions of the Bao (2019) and similar studies lend credence to the notion that the
interaction effect (which can be considered as a third variable) potentially influences the
relationship between commercial vehicle proportion and crash risk.
However, there is relatively limited research on the safety effects of the interaction of
roadway attributes and commercial vehicle proportion. This can be considered a research
gap in the literature because (a) commercial vehicles are a critical aspect of urban

24
transportation and therefore, urban social and economic development, (b) commercial
vehicles have been found to contribute significantly to crashes, (c) roadway design and
operations attributes significantly influence crashes (d) unlike most crash factors,
roadway design and operations attributes are within the control of the city authorities.
Therefore, we feel that the stated research gap is very significant, from a practical
perspective.
Table 2. 1 Summary of past related work
Study
scope
Reference
Study
region/
period
Independent variables
Outcome
variable
Only
examined
main
effects
Tay, 2003
Queensland/
1997-2001
Commercial vehicle factors: Proportion of truck (+), Proportion of bus (-),
Proportion of van (+)
Other factors: season
Nr. of fatal
crashes
Wong et al.,
2007
Hong Kong/
2002-2003
Commercial vehicle factors: Proportion of overall commercial vehicles (+)
Geometric factors: Curvature (+), Average lane width (-), Presence of tram stops
(+)
Traffic flow & traffic control factors: AADT (IS), pedestrian flow (+)
Nr. of fatal
& severe
intersection
crashes
Dinu and
Veeraragavan,
2011
Chennai,
India/
2001-2003
Commercial vehicle factors: Proportion of bus (+), Proportion of trucks (-)
Geometric factors: Curvature (+), Segment length (+), Driveway density (+)
Traffic flow & traffic control factors: Hourly traffic volume (+)
Nr. of night-
time
highway
crashes
Xu et al.,
2014
Hong Kong/
2002-2003
Commercial vehicle factors: Proportion of commercial vehicles (-)
Geometric factors: Curvature (+), Four or more approaches (+), Presence of a
turning pocket (+), Nr of pedestrian crossings (+)
Traffic flow & traffic control factors: AADT (+)
Nr. of slight
intersection
crashes
Dong et al.,
2014
Tennessee/
2001-2005
Commercial vehicle factors: Proportion of trucks (+)
Geometric factors: Angle of intersection (-), Shoulder width (+), Nr. of left-turn
lanes (+), Roughness index (+), Rutting depth (+)
Traffic flow & traffic control factors: AADT (+), Speed limit (+)
Nr. of
intersection
crashes
Zeng et al.,
2017a
Hong Kong/
2002-2006
Geometric factors: Curvature (-), Average lane width (+), Nr. of lanes (+), Nr. of
merging ramps (-), Presence of median barrier (-), Presence of bus stop (+)
Traffic flow & traffic control factors: AADT (-), speed limit (-), Nr. of
intersections (-)
Other factors: Rainfall (IS)
Crash rates
of road
segments
Wen et al.,
2018
Guangdong,
China/ 2014
Commercial vehicle factors: Proportion of medium bus & medium truck (+),
Proportion of large bus & large truck (IS)
Geometric factors: Curvature (IS), Vertical gradient (IS), Part of a bridge (IS),
presence of ramps (IS)
Traffic flow & traffic control factors: daily vehicle-km traveled (+)
Highway
injury crash
frequency
Considered
interaction
effects
Wen et al.,
2019
Guangdong,
China/ 2014
Commercial vehicle factors : proportion of medium bus & medium truck (IS),
proportion of large bus & large truck (-)
Geometric factors: Vertical gradient (-), Curved road (IS)
Traffic flow & traffic control factors: Monthly vehicle-km travelled (+)
Interaction terms: Gradient × wind speed (+), Gradient × precipitation (-),
Gradient × visibility (+), Curve × precipitation (+)
Highway
injury crash
frequency
Zhao et al.,
2019
State of
Connecticut/
2011-2015
Geometric factors: Nr. of through lanes (-), Rural setting (+), Outside shoulder
width (+), Segment length (+), Inside shoulder width (-)
Traffic flow & traffic control factors: Monthly traffic volume (+)
Other factors: temperature (-), precipitation (+), wind speed (+)
Interaction terms: Nr. of through lanes × rural setting (-), Nr. of through lanes ×
monthly traffic (+), Nr. of through lanes × outside shoulder width (-)
Highway
injury crash
frequency
Zhai et al.,
2019
Hong Kong/
2015
Commercial vehicle factors: Goods vehicle (+), taxi (+), bus (+)
Geometric factors: One-way road (-)
Interaction terms: Raining × pedestrian jaywalking (+), Raining × Careless
driving (+), Raining × footpath overcrowded (-), Above 30 ℃ × driver inattention
(+), Above 30℃ × pedestrian run onto the road (+)
Severity of
pedestrian
crashes
Azimi et al.,
2020
State of
Florida/
2007-2016
Geometric factors: Dry and sand road surface (+), Unpaved shoulder (+),
Downhill grade (+), Curve right alignment (+)
Traffic flow & traffic control factors: Vehicle speed of 20 to 49 (mph) (+),
Vehicle speed of 50 to 75 (mph) (+)
Severity of
truck
rollover
crashes

25
Interaction terms: Vehicle speed of 20 to 49 (mph) × clear vision (-), Vehicle
speed of 20 to 49 (mph) × Driver careless driving (+), Dark condition × driver
speeding (+), Dark condition × fog weather (+)
Note: (direction of the parameter: (+)positive; (-)negative; (IS)examined but not statistically significant
2.3.4 Modelling crash counts and crash rates
To address the issue of excessive zeros in crash count observations, earlier studies applied
the zero-inflated Poisson and negative binomial models (ZIP and ZINB), assuming a
dual-state generating process of crash data (Shankar et al., 2003; Qin et al., 2004).
Mannering and Bhat (2014) reviewed that zero-inflated models have been the most
popular model to handle the excessive zeros, and they are still frequently used in recent
research (Raihan et al., 2019; Gu et al., 2020). However, this approach has also been
criticized by Lord et al. (2005), Lord et al. (2007) and Lord and Mannering (2010),
suggesting that zero-inflated crash count models can create theoretical inconsistencies
regarding the source of the predominance of zeros. For example, instead of being
generated from inherently safe sites, excessive zeros can be cause by the roadway entities
with low vehicle exposure and high heterogeneity, short data collection time, small spatial
scale, underreported crashes, etc. Though many studies tried to avoid excessive zeros
using the aggregated analysis, it creates another problem of ignoring the time-varying
factors (Behnood and Mannering, 2019; Mannering, 2018). In this context, Pei et al.
(2016) developed a highly disaggregated model that incorporated the variables of year,
day of the week, and time of day. To accommodate the predominance of zero-crash
observations, the authors adopted a bootstrap resampling approach while still applying a
traditional negative binomial model. Nonetheless, the computation time would increase
remarkably when generating large bootstrap samples to reduce the effects of random
sampling errors (Efron and Tibshirani, 1994; Efron, 2014).
On the other hand, modelling the crash rate (e.g. crash count per million vehicle
kilometres travelled) is now advocated as an alternative to conventional crash count
modelling. Crash rate analysis has its advantages such as providing a standardized
measure of the safety performance of roadway entities (Xu et al., 2014; Zeng et al., 2017a,
2017b). Tobit regression approach is commonly applied to address the left-censoring
problem at zero of crash rates since many roadway entities can have zero crash record.
Using a multivariate random parameter Tobit model, Ulak et al. (2018) estimated the
26
crashes involving elderly (aged above 65) drivers, passengers, bicyclists, and pedestrians.
This study adopted the same set of explanatory variables for different crash types to gain
comparable results. It is revealed that there are positive correlations between crashes by
types of elderly road users, except between pedestrians and bicyclists. Results also
indicate that the effects of risk factors on crashes vary by road user type. For examples,
increase in density for aging population would increase the crash rates of elderly drivers
and passengers, but decrease the crash rates of elderly bicyclists and pedestrians.
Additionally, increase in traffic flow would decrease the crash rates of elderly drivers,
passengers, and bicyclists, while it has no significant effect on elderly pedestrians.
Similarly, Guo et al. (2019) looked into crash rates by collision types such as rear-end,
sideswipe, and angle crashes at freeway diverge areas. Results show that effects of
contributing factors on crash rates vary across collision types.
In the context of substantial differences in vehicle feature and driver behaviour across
vehicle types, the effects of explanatory variables on crashes can vary across vehicle
types. Indeed, rather than simply predicting the overall crash counts or crash rates in either
a microscopic (roadway entities, e.g. road segments, intersections) or a macroscopic level
(spatial units, e.g. traffic analysis zones), recent studies have investigated the crash
counts/rates by crash types using multivariate analysis (Lee et al., 2015; Li et al., 2015;
Wang et al., 2017; Ulak et al., 2018; Alarifi et al., 2018; Guo et al., 2019). It has been
proven by previous research that there could be strong correlations between crashes by
types within each study unit. Lee et. al (2015) applied a multivariate Poisson log-normal
regression approach to simultaneously investigate the motor vehicle, bicycle, and
pedestrian crashes. Shared unobserved factors across crashes by different transportation
modes were captured by the multivariate model, in which positive correlations were
found. Moreover, significant explanatory factors to motor vehicle, bicycle, and pedestrian
crashes are different. For examples, ‘proportion of household without vehicles’ is
significant only for pedestrian crashes, while ‘proportion of roadway with speed limit less
than or equal to 20 mph’ is significant only for bicycle crashes. Similarly, Wang et al.
(2017) investigated crash counts by severity level (i.e. property damage only, non-
incapacitating injury, and fatal and incapacitating injury) and collision type (i.e. same-
direction, intersecting-direction, opposite-direction, and single-vehicle crashes).
27
Multivariate Poisson log-normal model was used to accommodate the unobserved shared
effects across severity levels and collision types. More importantly, results of the
parameter estimates indicate that the coefficient for a risk factor can have different signs
(positive or negative) across crash types. As such, looking into crashes by type would
provide more useful insights since it identifies different contributory factors across crash
types.
To summarize, these studies justify a need to consider variations in crash counts or crash
rates by crash type (e.g., severity, transportation mode, collision type). It is suggested that
modelling crashes by type could be more favourable when identifying crash contributing
factors. However, estimating crashes by type using separated prediction models has its
limitation due to the assumption of independence in crash counts/rate across crash types.
Univariate models ignoring possible correlation resulted from common unobserved
factors across crash types within each site would have degraded modelling performance
and biased parameter estimation, compared with multivariate models. As such, due to the
differences in driver behaviour and crashworthiness among vehicle types, there is a need
to simultaneously model the crashes by vehicle type to identify risk factors while
accommodating possible correlation between crash types. In this way, effective
countermeasures can be tailored to enhance the safety performance of a specific vehicle
type.
2.4 Concluding remarks
This chapter demonstrates the results of the literature survey on driver safety assessment
studies. In particular, previous findings in terms of the professional drivers’ driving
performance, perception, attitude, behaviour and the corresponding crash risk are
presented. Conventional driving performance indicators and surrogate safety measures
are introduced. The phenomenon of increasing elderly drivers in the transport sector and
its possible negative effect on the safety performance of professional drivers are also
discussed. For the perceptions and attitudes of professional drivers, contributory factors
revealed in previous studies and their corresponding effects are explored. Deterrence
theory to measure driver’s perception towards traffic legislation, protection-motivation
28
theory, as well as the theory of planned behaviour are reviewed. This chapter also
discussed crash risks of professional drivers by commercial vehicle types and safety
effects of commercial vehicle mix.
There are several research gaps identified in the literature because (a) interaction between
better driving skill of professional driver and impaired driving performance of elderly
drivers is still unclear; (b) for the effectiveness of penalty and enforcement strategies,
there has been relatively little research focusing on the perception and attitude of
professional drivers; (c) while the compensatory strategy adopted by older general drivers
has been studied in some depth, there is little work that researches into the compensatory
behavior and its safety implications of older professional drivers; (d) interactions between
road safety factors, including road user behaviour, weather, and road geometric factors,
have been investigated in past research. However, this has rarely been done for the
proportion of commercial vehicles and roadway features. While consideration of the
interactions between these two specific factors may be a contribution that seems to be
only incremental, it is important to address this gap in the literature because both roadway
features and commercial vehicle proportion have been found to be significant factors of
urban road crash propensity; (e) last but not least, research is urgently needed to estimate
crashes by vehicle type simultaneously to better understand different effects of
contributing factors. Therefore, effective countermeasures can be tailored to tackle the
higher crash risk of commercial vehicles. These deficiencies are of great concern, given
that professional drivers make up more of the pool of overall drivers in Hong Kong. It
provides us with the motivation to fill the research gap.
29
Chapter 3 Evaluation of driving performance using driving
simulator
3.1 Introduction
Professional drivers, due to their work nature, spend much longer time on roads than the
non-professional drivers, which may contribute to their better driving skill. However,
fatigue and risk-taking behaviours are also prevalent among professional drivers, which
could increase the associated crash injury risk (Bunn et al., 2005; Duke et al., 2010;
Rosenbloom and Shahar, 2007). On the other hand, the proportion of elderly drivers in
transport sector has been increasing because of the ageing population, shortage of labor
and economic incentives (Duke et al., 2010). In Hong Kong, the percentage of the
population aged 60 or above has increased from 16.8% in 2008 to in 23.6% 2017 (Census
and Statistics Department, 2017). Accordingly, the percentage of the full driving license
holders who aged above 60 in Hong Kong increased from 8% in 2008 to 16% in 2017
(Transport Department, 2017a). The effect of age on driving performance is of increasing
concern since driving performance was recognized to be deteriorated with age (Islam and
Mannering, 2006; Shanmugaratnam et al., 2010).
This chapter aims to explore the interaction between age-related impairments on driving
performance and task familiarity of professional drivers using a driving simulator
approach. Two hypotheses are thus proposed, (1) age-related impairments on driving
performance can be reduced by the driving experience and task familiarity of professional
drivers; and (2) contributory factors to driving performance of professional drivers are
different from that of non-professional drivers. Section 3.2 provides the details of
experimental design and procedures of driving simulator test. Section 3.3 and 3.4 describe
the driving performance indicators and method of analysis used in this study. The results
and implications will be discussed in Section 3.5 Eventually, Section 3.6 provides the
concluding remarks. It is anticipated that the results will be indicative to the dispatch
policies and driver management strategies of the transport operators. This is particularly
30
important to a compact and ageing society like Hong Kong, where the public transport
usage is very high.
3.2 Simulator experiment design
3.2.1 Participants
A total of 50 male drivers were recruited for the driving simulator study. The selection
criteria were: (1) holding a valid full driving license; (2) driving for at least 5 hours a
week; and (3) having good health condition. Of the 50 participants, 26 were professional
drivers and 24 were non-professional drivers respectively. For the professional drivers,
one must be a full-time driver of taxi, public light bus, bus, or goods vehicle. In the
subsequent analysis, the professional drivers will be stratified into two groups: (i)
passenger vehicle (i.e. taxi, light bus and bus) drivers and (ii) goods vehicle drivers. It is
because the difference in the experience and driving skills between vehicle types may
moderate the association between driving performance and possible factors. Age of the
participants ranged from 40 to 69 years. The participants were classified into two
categories by age: (i) “mid-aged” referred to the drivers of age from 40 to 55 years; and
(ii) “older” referred to the drivers of age from 56 to 69 years. Such classification was
consistent to that of previous study (Li et al., 2016). Informed consent of the participation
was obtained, and monetary reward was provided. US$50 and US$25 were paid to the
professional drivers and non-professional drivers respectively for the participation. All
participants were required to have a good rest and abstain from the consumption of
alcohol and caffeinated beverages on the day before the experiment. Table 3.1 provides
the summary of the participants. Overall, the mean age was 53.2 years and the mean
driving experience (year holding driving license) was 29.0 years respectively.
A number of driving simulator studies have been carried out to examine the effects of
fatigue induced by prolonged driving time on driver performance. The duration of driving
tests varied from 30 minutes to 2 hours (Thiffault and Bergeron, 2003; Filtness et al.,
2012; Ahlström et al., 2018). In this study, duration of 60 minutes is adopted for each
simulated driving test. This is consistent to the time duration of a typical bus or goods
vehicle trip in Hong Kong. Also, according to the results of pilot tests, 60-minute driving
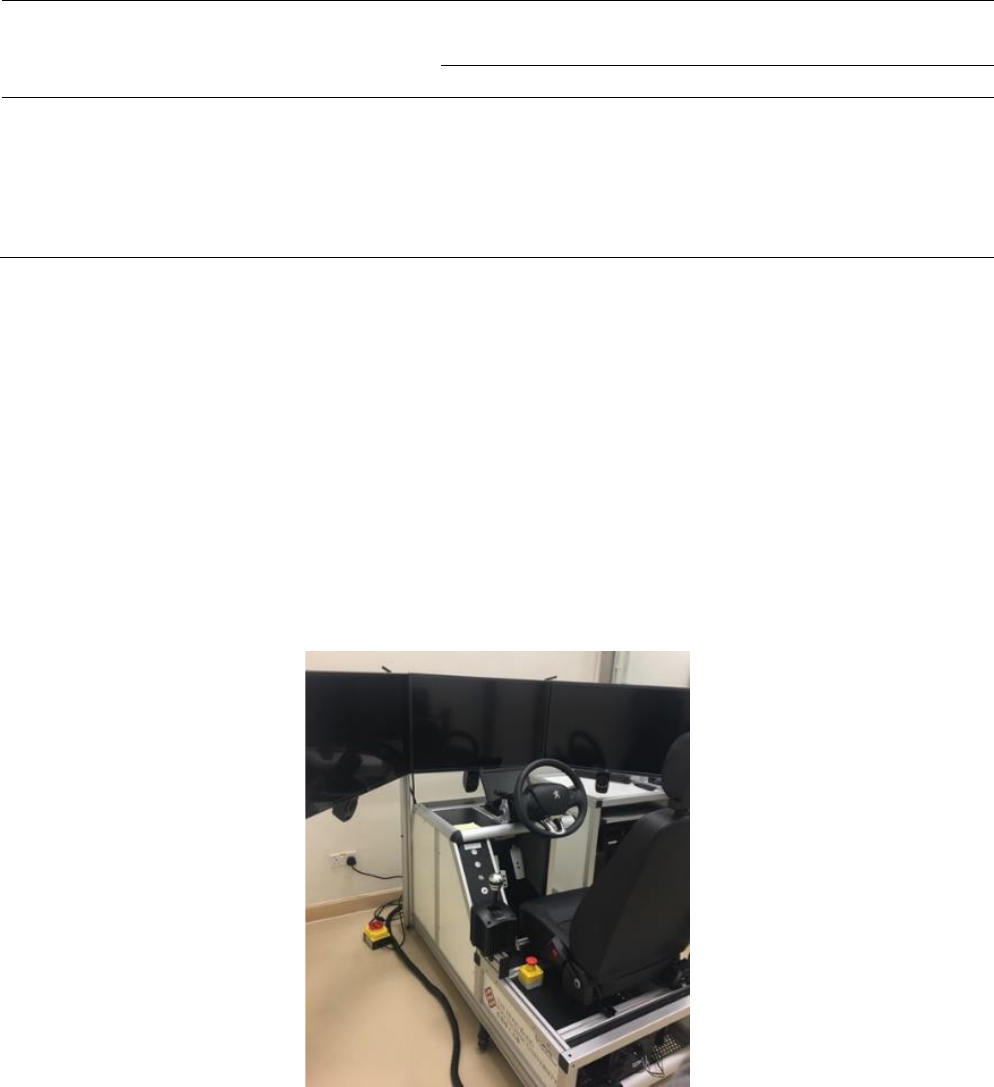
31
is long enough to reveal the driving performance under the influence of fatigue, while
avoiding the simulator sickness.
Table 3. 2 Summary of the participants of driving simulator study
Driver Group
Number of
participants
Age
Year holding full
driving license
Annual driving
distance (10
3
km)
Mean (s.d.)
Older professional
12
63.7 (2.9)
41.3 (4.3)
35.4 (10.1)
Mid-aged professional
14
43.9 (2.8)
22.1 (4.7)
51.6 (13.2)
Older non-professional
12
59.4 (3.3)
31.9 (6.7)
7.3 (2.1)
Mid-aged non-professional
12
47.2 (4.8)
21.7 (8.5)
10.7 (4.5)
Overall
50
53.2
29.0
27.3
3.2.2 Apparatus, driving scenario and test procedures
The apparatus is a fix-based driving simulator - OKTAL CDS-650. The apparatus is
depicted in Figure 3.1. As shown in Figure 3.1, three 32’’ full HD LED displays were set
up to provide 100
o
horizontal field of view. The simulator is equipped with clutch, brake
and throttle pedals, steering wheel (real Peugeot wheel with OKTAL force-feedback
system), signaler, dashboard, and a sound system. They are expected to provide realistic
feedback to the participants.
Figure 3. 1 OKTAL CDS-650 driving simulator

32
The simulated driving scenario is generated by the SCANeR
TM
studio software. The
scenarios are depicted in Figure 3.2. The typical road environments in Hong Kong are
simulated. In particular, two distinct road environments are set out: (1) Inner city road
with numerous roadside activities including but not limited to off-street parking, cyclists,
and pedestrians (walking or standing); and (2) Dual carriageway three-lane motorway
with no roadside activity. Speed limits of inner city road and motorway are 50km/h and
80km/h respectively, which are consistent to the actual driving environment in Hong
Kong.
Figure 3. 2 Typical scenarios for the simulated driving experiment
There are four types of simulated driving scenarios, with respect to road environment and
traffic flow condition, namely (i) Motorway – high traffic flow condition (Figure 3.2a);
(ii) Motorway – low traffic flow condition (Figure 3.2b); (iii) Inner city road – high
traffic flow condition (Figure 3.2c); and (iv) Inner city road – low traffic flow condition
(Figure 3.2d). Each participant was asked to complete two driving simulator tests. In the
experiment, a private car was simulated. Drivers were asked to drive on the middle lane
and were not allowed to make any overtake. In the low traffic flow condition, two vehicles
travelling around the subject vehicle were simulated. In the high traffic flow condition,
ten vehicles travelling around the subject vehicle were simulated. Also, a car would be

33
following the subject vehicle, while a safe following distance should be maintained. For
the geometric design, average lane width of the motorway is 3.5 m, and that of the inner
city road is 3.3 m respectively. To simulate the environment of urban area, a grid street
network in Shum Shui Po district, with traffic signals, buildings and shops, were
presented in the inner-city scenario. Also, walking and standing pedestrians (number of
pedestrians varied with traffic volume) on the footpaths would be simulated. To simulate
the environment of motorway, a highway section with bridges, interchanges, and roadside
features like plantation and slopes were presented. Also, the horizontal curvature and
vertical grade could vary. It is expected that the road environment (motorway versus
inner-city road) and traffic condition (low versus high traffic conditions) could moderate
the association between driver type, age and driving performance.
Table 3.2 provides the distribution of the simulated driving tests by driver group, road
environment and traffic flow condition. Because of the simulator sickness and
unavailability, some participants only completed one simulated driving test. Hence, a total
of 94 tests (instead of 100) were completed. Also, the distribution of the tests by road
environment, traffic flow condition and driver group, were not perfectly balanced (as
shown in Table 3.2).
Table 3. 3 Distribution of the completed driving simulator tests
Driver Group
Inner city road
Motorway
Total
High
traffic flow
Low traffic
flow
High
traffic flow
Low traffic
flow
Number of tests
Older professional
5
6
6
6
23
Mid-aged professional
7
7
7
7
28
Older non-professional
5
5
6
6
22
Mid-aged non-professional
5
5
6
5
21
Overall
22
23
25
24
94
Prior to the experiment, a 15-minute practice was provided to help the participants
familiarize with the control of simulator and detect the possible syndromes of simulator
sickness. After the practice, each participant was asked to complete the two 60-minute
driving simulator tests: one was on the motorway and the other was on the inner city road
respectively. The driving tasks were similar for the two tests. Between the tests, a 30-
34
minute break was given. In addition, the orders of the tests were randomized and
counterbalanced. Furthermore, the experiment would be stopped immediately when a
participant felt unwell.
3.3 Driving performance indicators
Four indicators are used to assess the driving performance. They are standard deviation
of lateral position (SDLP), standard deviation of heading error (SDHE), mean heading
error (MeanHE), and standard deviation of speed (SDspeed). In particular, lateral
position is defined as the perpendicular distance between the centerlines of a traffic lane
and the vehicle. On the other hand, as shown in Figure 3.3, the heading error is defined
as the angular deviation of the vehicle centerline from the tangent to the (curved) road
centerline (Mollenhauer et al., 1994; Comte et al., 2000). Increases in SDLP, SDHE,
MeanHE and SDspeed imply the prevalence of lateral instability, steering control
instability, steering error and inability of speed control respectively (Shanmugaratnam et
al., 2010; Li et al., 2016; Meng et al., 2019). Additionally, these indicators also imply the
existence of driver fatigue and sleepiness, especially after the prolonged driving (Boyle
et al., 2008; Meng et al., 2019). Furthermore, they are sensitive to the interactions between
road environment, driver fatigue and driving performance (Thiffault and Bergeron, 2003;
Ahlström et al., 2018). In this study, all the driving performance indicators were recorded
at a very high frequency (100Hz) throughout the test. In addition, the data was aggregated
into twelve time periods, i.e. [0-5) minute, [5-10) minute, [10-15) minute, [15-20) minute,
[20-25) minute, [25-30) minute, [30-35) minute, [35-40) minute, [40-45) minute, [45-50)
minute, [50-55) minute, [50-60) minute respectively. Therefore, there were 1128
observations (94 tests x 12 time periods) in total for each driving performance indicator.
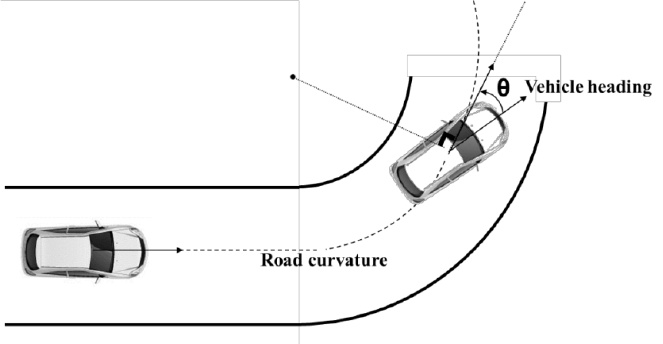
35
Figure 3. 3 Illustration of the heading error θ
Table 3.3 summarizes the data collected in the simulated driving tests. As shown in Table
3.3, the professional drivers may have better driving performance than the non-
professional drivers, as the average SDLP, MeanHE and SDspeed of professional drivers
are lower than that of the counterpart. On the other hand, performances of the mid-aged
drivers are better than that of the older drivers. For the road environment, driving
performances on inner city road are better than that on motorway, given that the average
SDLP, SDHE, MeanHE and SDspeed are lower on inner city road, as compared to that
on motorway. Furthermore, the driving performance tends to degrade over time in general,
as the average SDLP, SDHE, MeanHE and SDspeed in the last two time periods are all
higher than that in the first two time periods, and so on and so forth.
36
Table 3. 4 Summary statistics for the simulated driving tests (N=1128)
Variable
Number of
observations
SDLP
SDHE
MeanHE
SDspeed
Mean (s.d.)
Professional driver
612
0.20 (0.08)
0.33 (0.21)
0.33 (0.14)
3.49 (1.59)
Passenger vehicle driver
408
0.21 (0.07)
0.32 (0.20)
0.34 (0.13)
3.59 (1.45)
Goods vehicle driver
204
0.19 (0.08)
0.33 (0.22)
0.33 (0.15)
3.29 (1.61)
Non-professional driver
516
0.21 (0.07)
0.32 (0.21)
0.36 (0.13)
3.52 (1.49)
Older driver
540
0.22 (0.08)
0.34 (0.21)
0.36 (0.14)
3.76 (1.69)
Mid-aged driver
588
0.20 (0.06)
0.32 (0.20)
0.33 (0.13)
3.26 (1.34)
High traffic flow
564
0.21 (0.08)
0.32 (0.20)
0.35 (0.11)
3.56 (1.54)
Low traffic flow
564
0.21 (0.08)
0.34 (0.21)
0.34 (0.16)
3.44 (1.56)
Motorway
588
0.26 (0.05)
0.51 (0.12)
0.44 (0.11)
4.43 (1.38)
Inner city road
540
0.15 (0.05)
0.13 (0.02)
0.24 (0.05)
2.49 (0.95)
Time period 1 (0-5 min)
94
0.20 (0.07)
0.28 (0.16)
0.31 (0.10)
3.13 (1.19)
Time period 2 (6-10 min)
94
0.20 (0.07)
0.28 (0.17)
0.32 (0.11)
3.26 (1.37)
Time period 3 (11-15 min)
94
0.18 (0.06)
0.29 (0.16)
0.32 (0.11)
3.36 (1.45)
Time period 4 (16-20 min)
94
0.19 (0.07)
0.28 (0.16)
0.32 (0.11)
3.63 (1.60)
Time period 5 (21-25 min)
94
0.21 (0.08)
0.35 (0.23)
0.35 (0.14)
3.35 (1.49)
Time period 6 (26-30 min)
94
0.22 (0.08)
0.34 (0.22)
0.35 (0.14)
3.54 (1.48)
Time period 7 (31-35 min)
94
0.20 (0.07)
0.33 (0.20)
0.35 (0.12)
3.52 (1.57)
Time period 8 (36-40 min)
94
0.20 (0.06)
0.31 (0.19)
0.33 (0.12)
3.62 (1.68)
Time period 9 (41-45 min)
94
0.21 (0.08)
0.36 (0.23)
0.36 (0.14)
3.55 (1.53)
Time period 10 (46-50 min)
94
0.22 (0.08)
0.35 (0.23)
0.37 (0.17)
3.50 (1.55)
Time period 11 (51-55 min)
94
0.22 (0.08)
0.38 (0.24)
0.38 (0.15)
3.65 (1.57)
Time period 12 (56-60 min)
94
0.23 (0.08)
0.37 (0.24)
0.38 (0.15)
3.88 (1.76)

37
3.4 Statistical method
Multiple regression approach is applied to measure the effects of driver type, age, road
environment, traffic flow condition and driving time on driving performance. Also, the
interaction effect between driver type and age is considered. Then, disaggregated models
by driver type (i.e. professional and non-professional drivers) are developed based on the
results of market segmentation analysis (Wong et al., 2008; Szeto et al., 2013).
In this study, each participant was asked to complete two simulated driving tests (each
for 60 minutes). On the other hand, there were twelve observations (by twelve time
periods) for each test. The observations within the same test and of the same participant
would be correlated because they shared the common (unobserved) random effect. To
allow for the correlation between observations, the panel random intercept regression
approach was applied to measure the association between driving performance and
possible factors, including road environment, traffic flow condition, driver occupation,
age and driving time. The random intercept models (θ
1
for SDLP, θ
2
for SDHE, θ
3
for
MeanHE and θ
4
for SDspeed respectively) are specified as follows,
(1)
(2)
(3)
(4)
where i refers to the test (i = 1, 2, 3, …, and 94); t refers to the time period (t = 1, 2, 3 …
12); μ
refers the independent residual (between tests); ε
it
refers to the independent residual
(between observations); x is the value of explanatory variable (including road
environment, traffic flow condition, driver type, age, and time period) and β is the
corresponding coefficient respectively.
38
The coefficients were estimated using the maximum likelihood approach. To assess the
goodness-of-fit of the proposed model, the likelihood ratio test statistics are given by,
LR = -2 [LL(β
H0
) – LL(β
ML
)]
(5)
where LL(β
H0
) is the restricted log likelihood function and LL(β
ML
) is the unrestricted log
likelihood function respectively. Under the null hypothesis, LR is χ
2
distributed with q
degree of freedom (q is the difference in the number of parameters between the restricted
and unrestricted models). A good fit was indicated by a statistically significant LR. In this
study, the statistical package NLOGIT 5.0 was used to establish the proposed random
intercept models.
3.5 Results
In this study, the random intercept approach was used to measure the effects of factors
including driving time, age, driver type, road type and traffic flow condition on the driving
performance, with which the unobserved effect of correlation between observations of
the same participant and in the same test was controlled for. There were 1128 observations
for each model (SDLP, SDHE, MeanHE and SDspeed). Table 3.4 presents the results of
parameter estimation of the overall models. Since driver type, age, traffic flow condition
and driving time are the variables of interest in this study, they are all considered in the
proposed models, even no evidence can be established for significant correlation with the
driving performance indicators. Additionally, two types of professional drivers (i.e.
passenger vehicle and goods vehicle drivers) are considered. This is to control for the
effects of differences in experience and skills between vehicle types. For the interaction
effect, focus was paid on the two interested variables (i.e. older and professional driver).
However, no significant evidence related to the driving performance of older professional
drivers could be established.

39
Table 3. 5 Results of parameter estimates of the (overall) random intercept models
Variable
SDLP
SDHE
MeanHE
SDspeed
Coeff.
(z-stat.)
Coeff.
(z-stat.)
Coeff.
(z-stat.)
Coeff.
(z-stat.)
Constant
0.140
(14.26)**
0.098
(7.16)**
0.206
(12.61)**
1.875
(8.00)**
High traffic flow
-0.0005
(-0.06)
-0.031
(-3.00)**
0.004
(0.32)
0.115
(0.59)
Motorway
0.109
(13.24)**
0.370
(35.70)**
0.204
(14.98)**
1.946
(9.95)**
Goods vehicle driver
-0.027
(-2.37)*
-0.011
(-0.79)
-0.031
(-1.63)
-0.264
(-0.97)
Passenger vehicle driver
-0.005
(-0.58)
-0.010
(-0.90)
-0.023
(-1.52)
0.085
(0.39)
Older driver
0.023
(2.70)**
0.017
(1.66)
0.021
(1.52)
0.472
(2.40)*
Time period 2 (5-10 min)
0.001
(0.14)
0.006
(0.65)
0.005
(0.71)
0.105
(1.07)
Time period 3 (10-15 min)
-0.020
(-4.92)**
0.016
(1.66)
0.006
(0.86)
0.201
(2.04)*
Time period 4 (15-20 min)
-0.007
(-1.65)
0.002
(0.21)
0.010
(1.40)
0.471
(4.79)**
Time period 5 (20-25 min)
0.015
(3.59)**
0.076
(7.67)**
0.041
(5.84)**
0.194
(1.97)*
Time period 6 (25-30 min)
0.015
(3.75)**
0.062
(6.31)**
0.040
(5.72)**
0.384
(3.91)**
Time period 7 (30-35 min)
0.004
(0.92)
0.054
(5.47) **
0.039
(5.47)**
0.362
(3.68)**
Time period 8 (35-40 min)
-0.0002
(-0.04)
0.037
(3.76)**
0.019
(2.74)**
0.469
(4.77)**
Time period 9 (40-45 min)
0.015
(3.60)**
0.079
(7.96)**
0.050
(6.95)**
0.399
(4.05)**
Time period 10 (45-50 min)
0.015
(3.73)**
0.077
(7.84)**
0.065
(9.19)**
0.344
(3.50)**
Time period 11 (50-55 min)
0.022
(5.33)**
0.098
(9.95) **
0.066
(9.41)**
0.491
(4.99)**
Time period 12 (55-60 min)
0.028
(6.85)**
0.097
(9.87)**
0.070
(9.98)**
0.761
(7.72)**

40
Goodness-of-fit
Unrestricted loglikelihood
2281.89
1348.18
1671.35
-1299.14
Restricted loglikelihood
1320.83
178.47
671.08
-2084.54
Likelihood ratio test
1922.12**
2339.42**
2000.54**
1570.80**
** Statistical significance at the 1% level
* Statistical significance at the 5% level
41
In addition, the market segmentation analysis using the Watson and Westin pooling
approach (Wong et al., 2008; Szeto et al., 2013) was conducted to examine the possible
intervention effect by driver type (i.e. professional versus non-professional drivers) on
the relationship between driving performance and possible factors. Disaggregated models
for professional and non-professional drivers were then established based on the results
of market segmentation analysis (shown in Table 3.5). Therefore, differences in possible
factors between professional and non-professional drivers could be assessed. Table 3.6
presents the results of the disaggregated analyses. Overall, the proposed models fit well
with the observations, all at the 1% level of significance. Results of parameter estimation
for each of the four driving performance indicators (i.e. SDLP, SDHE, MeanHE and
SDspeed) are described one by one in the following Section 3.5.1, 3.5.2, 3.5.3 and 3.5.4.
Table 3. 6 Results of market segmentation analysis
Indicator
LL(β
H0
)
LL(β
ML
)
Degrees of
freedom
Likelihood
Ratio
SDLP
2280.24
2294.37
16
28.26*
SDHE
1348.18
1379.61
16
62.86**
MeanHE
1671.27
1684.44
16
26.34*
SDspeed
-1299.90
-1280.12
16
41.38**
** Significant at the 1% level
* Significant at the 5% level

42
Table 3. 7 Results of parameter estimates for professional and non-professional drivers
Variable
SDLP
SDHE
MeanHE
SDspeed
Pro
Non-Pro
Pro
Non-Pro
Pro
Non-Pro
Pro
Non-Pro
Constant
0.121**
0.148**
0.095**
0.101**
0.180**
0.226**
2.026**
1.668**
High traffic flow
0.001
0.000
-0.040*
-0.051**
-0.002
-0.026
-0.142
0.443
Motorway
0.117**
0.098**
0.365**
0.379**
0.205**
0.206**
1.803**
2.094**
Older driver
0.021*
0.021
0.006
0.001
0.023
-0.021
0.690**
0.212
Older x High traffic flow
--
--
--
0.060*
--
0.076*
--
--
Time period 2
0.006
-0.005
0.018
-0.008
0.017
-0.009
0.032
0.193
Time period 3
-0.016**
-0.025**
0.026
0.005
0.011
-0.001
0.143
0.271*
Time period 4
-0.003
-0.011
0.001
0.003
0.012
0.008
0.391**
0.567**
Time period 5
0.020**
0.009
0.097**
0.050**
0.043**
0.038**
0.071
0.342**
Time period 6
0.015*
0.016**
0.068**
0.055**
0.039**
0.042**
0.326*
0.455**
Time period 7
0.001
0.007
0.056**
0.051**
0.042**
0.035**
0.345*
0.385**
Time period 8
-0.005
0.005
0.030*
0.046**
0.019
0.019*
0.425**
0.523**
Time period 9
0.015**
0.014*
0.074**
0.084**
0.043**
0.056**
0.214
0.619**
Time period 10
0.021**
0.008
0.076**
0.079**
0.071**
0.057**
0.253
0.454**
Time period 11
0.026**
0.017**
0.106**
0.088**
0.072**
0.060**
0.314*
0.671**
Time period 12
0.031**
0.024**
0.104**
0.090**
0.070**
0.070**
0.689**
0.849**

43
Variable
SDLP
SDHE
MeanHE
SDspeed
Pro
Non-Pro
Pro
Non-Pro
Pro
Non-Pro
Pro
Non-Pro
Goodness-of-fit
Unrestricted Loglikelihood
1228.76
1065.61
670.85
711.28
868.62
818.49
-752.79
-527.33
Restricted Loglikelihood
711.38
613.19
93.37
85.22
341.32
336.59
-1121.04
-963.07
Likelihood ratio test
1034.58**
904.84**
1154.96**
1252.12**
1054.60**
963.80**
736.50**
871.48**
Notes:
** Statistical significance at the 1% level
* Statistical significance at the 5% level
“Pro” refers to professional driver and “non-Pro” refers to non-professional driver respectively

44
(a) Lateral control stability
(b) Steering stability
(c) Steering control
(d) Speed Control
Figure 3. 4 Driving performance of professional and non-professional drivers over time
Note:
1. The box plots indicate the minimum, 1st quartile, median, 3rd quartile and maximum
of the performance indicators (i.e. SDLP, SDHE, MeanHE, SDspeed)
2. “X”s indicate the average value
45
3.5.1 Lateral stability
Standard deviation of lateral position is widely used to reflect the driver’s ability to
maintain the lateral stability (Boyle et al., 2008). Increase in SDLP implies the
degradation in lateral control performance. As shown in Table 3.4, for the main effect,
driver type, driver age, road type and driving time are found associated with SDLP. In
particular, SDLP of older driver is higher than that of the mid-aged driver. SDLP of goods
vehicle driver is lower than that of the non-professional driver. Also, SDLP tends to
increase when driving on the motorway. In addition, SDLP increases remarkably when
the driving time is greater than 25 minutes (Time period 5).
As shown in Table 3.6, driver age, road type and driving time significantly affected the
lateral stability of professional driver. SDLP of older professional driver tends to be
higher than that of the mid-aged professional driver. Also, remarkable increase in SDLP
could be observed after driving for 25 minutes (Time period 5). On the other hand, no
evidence could be established for the association between driver age and SDLP of non-
professional driver. Yet, obvious increase in SDLP of non-professional driver could be
observed after 30 minutes (Time period 6).
3.5.2 Stability of steering control
Standard deviation of heading error reflects the driver’s stability of steering wheel control.
Increase in SDHE indicates the degradation in steering performance. As shown in Table
3.4, for the main effects, traffic flow condition, road type and driving time are found
associated with SDHE, all at the 1% level of significance. In particular, SDHE increases
when driving on the motorway and decreases when driving under the high traffic flow
condition. In addition, SDHE increases remarkably when the driving time is greater than
25 minutes (Time period 5).
For the disaggregated analyses, as shown in Table 3.6, traffic flow condition, road type
and driving time significantly affected the SDHE, both of professional and non-
professional drivers. However, the interaction effect between driver age and traffic flow
condition was significant only among non-professional drivers. In particular, steering
46
stability of older non-professional driver tends to be worse than that of the mid-aged non-
professional drivers, when driving under the high traffic flow condition.
3.5.3 Steering error
Mean heading error refers to the mean angular deviation of the vehicle trajectory from
that of the road centerline. Increase in MeanHE indicates the degradation in steering
accuracy. As shown in Table 3.4, for the main effects, road type and driving time are
found associated with MeanHE at the 1% level of significance. In particular, MeanHE
increases when driving on the motorway. Also, MeanHE increases remarkably when the
driving time is greater than 25 minutes (Time period 5).
For the disaggregated analyses, as shown in Table 3.6, main effects of road type and
driving time on MeanHE were found significant both for the professional and non-
professional drivers. However, the interaction effect between driver age and traffic flow
condition on MeanHE is significant only among the non-professional drivers. In
particular, steering error of older non-professional driver was greater than that of the mid-
aged non-professional driver, when driving under the high traffic flow condition.
3.5.4 Speed stability
Standard deviation of speed is widely used to reflect the driver’s ability to maintain the
stability of driving speed. Increase in SDspeed implies the degradation in speed control
performance. As shown in Table 3.4, for the main effect, driver age, road type and driving
time are found associated with SDspeed. In particular, SDspeed of older driver is higher
than that of the mid-aged driver. Also, SDspeed tends to increase when driving on the
motorway. In addition, SDspeed increases remarkably when the driving time is greater
than 15 minutes (Time period 3).
For the disaggregated analyses, as shown in Table 3.6, driver age, road type and driving
time all affect the speed control performance of professional drivers. SDspeed of older
professional driver tends to be higher than that of the mid-aged professional driver. Also,
significant increase in the SDspeed of professional driver could be observed after 20

47
minutes (Time period 4). On the other hand, no evidence could be established for the
association between driver age and SDspeed of non-professional driver. Yet, remarkable
increase in the SDspeed could be observed for non-professional driver after 15 minutes
(Time period 3).
3.6 Discussion
In this study, we hypothesized that (1) the age-related impairments on driving
performance could be reduced by the driving experience and task familiarity of
professional drivers; and (2) contributory factors to the driving performance of
professional drivers were different from that of non-professional drivers. Results of
overall model indicate that increase in age and driving on the motorway are associated
with the degradation of lateral and speed control stability. In addition, road type and
traffic flow condition are associated with the steering performance. Furthermore, results
of disaggregated models indicate that effects of possible environmental factors on the
driving performances of professional drivers are similar to that of non-professional
drivers. Nevertheless, interaction effect by driver age on the association between traffic
flow condition and driving performance is remarkable exclusively for the steering
performance of non-professional drivers. In particular, the older non-professional drivers
tend to have higher MeanHE and SDHE when driving under the high traffic flow
condition. On the other hand, effect of age is exclusive for the lateral and speed control
performances of professional drivers.
3.6.1 Effect of age on driving performance
Overall, older drivers show poorer lateral and speed control performance than the mid-
aged drivers in this study. It is consistent to the findings of previous studies that driving
performance deteriorates with age (Islam and Mannering, 2006; Shanmugaratnam et al.,
2010). This could be attributed to the degraded physical, mental and cognitive capabilities
(Lundberg et al., 1998; Andrews and Westerman, 2012). In addition, older people have
higher perceptual sensitivity to the mental workload induced by driving, as compared to
the younger counterpart (Cantin et al., 2009).
48
Estimation results for non-professional driver indicate that interaction between age and
traffic condition is statistically significant. For non-professional driver, degradation in
steering performance by age is found remarkable under the high traffic flow condition.
Such findings in line with that of previous studies (Cantin et al., 2009; Trick et al., 2010).
In particular, older drivers often consider driving under the high traffic flow condition as
a challenging task (with higher mental workload). Since older drivers tend to be risk
averse, they would avoid driving under the unfavorable road environment and traffic
condition (Molnar and Eby, 2008; Cantin et al., 2009; Trick et al., 2010; Teh et al., 2014).
In contrast, no evidence could be established for the degraded driving performance of
older professional drivers under the high traffic flow condition. This could be attributed
to the task familiarity of older professional drivers (Andrews and Westerman, 2012). Yet,
it is recommended that more rigorous medical assessment should be implemented for the
renewal of driving license of older drivers, considering their high crash involvement rates.
Also, the moderating effects by other environmental conditions, such as lighting and
weather, on the association between age and driving performance must be explored in the
extended study.
3.6.2 Performance of professional drivers
Results of overall model indicate that goods vehicle drivers have better lateral control
performance than the non-professional drivers. This can be attributed to the higher driving
experience and better driving skill of goods vehicle drivers (Borowsky and Oron-Gilad,
2013). Seemingly, goods vehicle drivers in Hong Kong demonstrate better driving skills
and attitudes. Indeed, the crash involvement rate (per million vehicle-km) of goods
vehicle was lower than that of other commercial vehicles (i.e. taxi, light bus and bus) in
Hong Kong (Transport Department of HKSAR, 2017). Yet, no evidence can be
established for significant difference in driving performance between passenger vehicle
drivers and non-professional drivers. Seemingly, superior driving skill of passenger
vehicle drivers related to driving experience on different types of the roads, vehicle size
relative to road width, and work-related trips could be offset by the aggressive driving
behaviors (Kontogiannis, 2006; Öz et al., 2010a; Li et al., 2019). Examples of aggressive
driving behaviors include but are not limited to speeding, red light running, and improper
lane changing. They are indeed more prevalent for passenger vehicle drivers because of
49
the desire for higher revenues and expectations of the employers/customers (Wong et al.,
2008). In this study, effects of operation characteristics and attitudes of the drivers on the
driving performance are however not considered. It is worth exploring the effects of
driver perceptions and characteristics (e.g. perceived or observed aggressive behaviours,
risk-taking traits, traffic offenses, and crash involvement) on the driving performance in
the extended study. Furthermore, it is of essence to measure the association between the
road geometry, driving performance (especially on steering performance) and crash risk,
when comprehensive vehicle trajectory and crash data of professional drivers are
available (Ahlström et al., 2018).
For the difference in effects of possible factors between professional and non-professional
drivers, age effect is found significant only among the professional drivers. In particular,
lateral and speed control performances of mid-aged professional drivers are better than
that of the older professional drivers. Seemingly, the reduction in exposure by age could
be a significant contributory factor to the degraded performance of professional drivers.
Older professional drivers have lower annual driving distance that their mid-aged
counterparts. It could be because the working and/or driving hours of older professional
drivers tend to be lower. It is likely that the older professional drivers proactively reduce
their exposure on road to mitigate the elevated crash risk due to age-related impairments.
On the other hand, the driving hours of older professional drivers can be limited by the
safety management policy of the transport operators. To this end, it is proposed that
additional driver training, particularly on lateral stability and speed control, could be
provided to the older professional drivers to mitigate the age-related impairments.
3.6.3 Effect of other factors on driving performance
As revealed in this study, the lateral performance of driver degrades over the 60-minute
drive in general. It is consistent to the findings of previous studies (Oron-Gilad and
Ronen, 2007; Ting et al., 2008; Farahmand and Boroujerdian, 2018). This could reflect
the increase in fatigue level resulted from the prolonged driving (Du et al., 2015;
Ahlström et al., 2018). Degradation of speed control, lateral stability and steering
performance are associated with the increase in driver sleepiness and fatigue, particularly
after prolonged driving (Boyle et al., 2008; Meng et al., 2019). In addition, the results of
50
overall and disaggregated models show that degraded lateral, steering and speed control
performances tend to occur when driving on the motorways. This could be attributed to
the drowsiness due to the monotonous driving environment, and limited roadside
activities and interactions with other road users (Oron-Gilad and Ronen, 2007;
Williamson et al., 2014; Du et al., 2015; Ahlström et al., 2018). Yet, such findings could
be verified when information on both subjective and physiological indicators are
available in the extended study (Oron-Gilad et al., 2008). On the other hand, the degraded
driving performance on the motorways could also be attributed to the geometric and
operational characteristics of the roadway. Indeed, degradation of lateral and speed
stabilities could be profound when speed limit and road width increase (Ahlström et al.,
2018; Meng et al., 2019). It would be worth exploring the effect of road curvature (in
term of the number of curves, interval between curves and radius of curvature), road width
and speed limit on the association between driving performance and driving time in the
extended study.
It was expected that the effect of driving time on driving performance should be different
between professional and non-professional drivers, since the professional drivers are
more skillful in general. Results of disaggregated model indicated that onset of the
significant degradations in lateral and speed control performance are different between
professional and non-professional drivers. Moreover, the lateral and steering performance
of professional drivers started to degrade after driving for 25 minutes. This should be
indicative to the safety management strategies of the transport operators, especially the
design and development of in-vehicle driver monitoring and assistance system on the
commercial vehicle fleets (Davidse et al., 2009). For example, eye tracking unit for the
detection of driver fatigue, and electronic stability control system could be installed on
the passenger vehicles (for franchised buses in Hong Kong, a subsidization scheme has
been introduced to retrofit smart safety devices including electronic stability control on
the existing bus fleets).
3.7 Concluding remarks
Professional drivers are considered more skillful and experienced. However, the overall
crash involvement rate of professional drivers is higher than their counterparts in Hong

51
Kong. Also, the population of older professional driver is increasing because of the ageing
population. In this chapter, we examined two hypotheses 1) the impairment of driving
performance by age could be reduced by the driving experience and task familiarity of
professional drivers; 2) the contributory factors to the driving performance of professional
drivers should be different from that of non-professional drivers. The driving performance
indicators considered are standard deviation of lateral position, standard deviation of
heading error, mean heading error and standard deviation of driving speed.
Results of overall model indicate that goods vehicle drivers tend to have better lateral
stability than the non-professional drivers. Driving performances of mid-aged drivers
tend to be better than that of the older drivers. Based on the results of disaggregated
analysis, the impairments on driving performance by age (i.e. older) are more prevalent
when driving under the high traffic flow condition among non-professional drivers. No
evidence could be established for the degraded driving performance of older professional
drivers under the high traffic flow condition. Although older drivers are often risk averse
and would avoid driving under the high traffic flow condition, age-related impairments
could be reduced by the driving experience and task familiarity of professional drivers.
Therefore, for the driver recruitment and management, decision making of transport
operators should not be solely based on driver age. Instead, rigorous assessment of driving
skills and enhanced training could be provided for the older drivers. Furthermore, results
of the disaggregated models indicate that the effect of age is found prevalent only among
the professional drivers. Lateral and speed control performance of mid-aged professional
drivers were superior than that of older professional drivers. Seemingly, reduction in
exposure could be a contributory factor to the impaired driving performance of older
professional drivers. It is recommended that driver training could be provided to the older
drivers, particular on vehicle control. This is to mitigate the increase in collision risk
attributed to reduced exposure. As for the second hypothesis, results of disaggregated
analyses indicate that effects of possible environmental factors (i.e. motorway and high
traffic flow condition) of professional drivers are similar to that of non-professional
drivers. However, the interaction between age and traffic flow condition are exclusive to
the non-professional drivers only.
52
In this study, the interaction effects by the driver perception and attitude on the association
between driving performance and driver characteristics are not considered. Additionally,
the driving performances of male drivers only are assessed in the driving simulator
experiment, given the relatively small sample size. Effect of gender on driving
performance is therefore not attempted. It is worth exploring the effects of driver
characteristics (in term of crash involvement, traffic offense and risk perception) on the
driving performance when the comprehensive information is available from the
attitudinal survey (Wong et al., 2008; Li et al., 2014). Furthermore, effects of road design
and environmental condition (e.g. lighting and weather) on the crash risk of professional
driver can be revealed based on comprehensive vehicle trajectory and crash data in
extended study.
53
Chapter 4 Evaluation of conflict risk using driving simulator
4.1 Introduction
The percentage of elderly who hold a valid driving license has been increasing rapidly in
those ageing societies (Newnam et al., 2020, 2018). Indeed, Hong Kong is facing the
problem of ageing population because of the reduction in fertility rates and increased life
expectancy. By 2035, proportion of population of age above 65 in Hong Kong would
reach 25% (Sze and Christensen, 2017). The proportion of drivers aged above 60 with a
valid public transport vehicle (e.g. taxi, light bus, and bus, etc.) driving license was 37-
46% in 2017 (Lee, 2018).
Safety of professional drivers is of great concern since they have much higher exposure
on roads. In Hong Kong, 50% of work trips are made by taxi, public light bus, and bus
(Hong Kong Transport Department, 2014). More importantly, the proportion of older
drivers in the transport sector increases dramatically because of the shortage of labour.
Given the age-related declines in driving performance, the strategy adopted by older
drivers to compensate for their elevated crash risk has drawn increasing attention in recent
years. This issue is of importance to employers given their multiple responsibilities to
keep the drivers, passengers, and cargo safe, as well as to support their older employees
who want to stay in the industry. This information can be used to review and revise control
measures, as well as develop new intervention, designed to promote the safety, health and
wellbeing of older professional drivers.
While the compensatory strategy adopted by older general drivers has been studied in
some depth, there is little work that researches into the compensatory behavior and its
safety implications of older professional drivers. This is surprising given that the
proportion of older drivers in the transport sector has been increasing dramatically
because of the shortage of labor. Therefore, we are motivated to study the driving
performance of professional drivers from the behavioral perspective. The aim of this
study is to address the research question that whether the older professional drivers reduce
the crash risk more effectively by capitalizing on their rich experience, and to provide
54
suggestions on driver training and management policy for transport authority and
operators.
In this chapter, two hypotheses are proposed, (i) older professional drivers have lower
likelihood and severity of rear-end conflict, as compared with older non-professional
drivers; and (ii) likelihood and severity of rear-end conflict after prolonged driving would
be higher for older non-professional drivers. The hypotheses are proposed considering
the possible differences in driving skill, exposure, and experience (especially driving long
hours) between professional and non-professional drivers. A car-following scenario with
sudden brakes of the leading vehicle is used to test the hypotheses. Time exposed time-
to-collision (TET) and time integrated time-to-collision (TIT) are adopted as performance
measure indicating the severity of traffic conflict. Also, drivers’ brake reaction times for
the sudden events are recorded. A random-parameter Tobit regression approach is applied
to investigate the associations between performance measures and possible factors
including driver occupation, driver age and traffic flow condition.
The remainder of this chapter is structured as follows. Section 4.2 describes the
experimental design and data collection. Section 4.3 and 4.4 illustrate the surrogate safety
measures and analysis method, respectively. Results of the hypotheses are presented in
Section 4.5 and implications of the results are discussed in Section 4.6. Finally, Section
4.7 provides the concluding remarks.
4.2 Simulator experiment design
4.2.1 Participants
Forty-four male drivers were recruited for the driving simulator experiment. The
inclusion criteria are having a full driving license, minimum driving time of 5 hours per
week and (self-declared) good health condition. The exclusion criteria are feeling unwell
and having any syndrome of simulator sickness (e.g. headache, nausea, blurred vision and
dizziness, etc.). Participants were asked to have enough rest and abstain from alcohol and
caffeinated beverages 24 hours prior the simulator test. Prior to the experiment, a 15-
minute training session was provided to each participant to help familiarize the

55
participants with the driving simulator controls. Informed consent in accordance with the
requirements of university research ethics committee was obtained, and monetary
compensation (US$25-50) was provided for the participation.
Table 4. 1 Summary of participants of driving simulator study
Professional driver
Non-professional driver
Overall
Mid-aged
Older
Mid-aged
Older
Number of participants
10
9
11
11
41
Mean (S.D.)
Age
43.5
(2.5)
63.4
(3.1)
46.5
(4.5)
60.1
(3.2)
53.3
(9.1)
Year holding full
driving license
21.5
(4.5)
41.4
(4.7)
21.4
(8.9)
32.1
(7.0)
29.1
(10.4)
Annual driving distance
(10
3
km)
51.6
(13.8)
34.4
(9.8)
10.8
(4.7)
7.0
(2.0)
26.0
(2.1)
All participants need to complete a short questionnaire survey to provide information on
driver age, annual driving distance, occupation, record of traffic convictions and accident
involvement. Table 4.1 presents the summary of participants of driving simulator study.
Of the 44 participants, three (i.e. 1 mid-aged professional and 2 older professional drivers)
were excluded since they had driving simulator sickness. Data collected from 19
professional drivers and 22 non-professional drivers were used for the analysis. In this
study, professional drivers refer to the full-time taxi, public light bus, public bus and
goods vehicle drivers. Furthermore, the participants were classified into two categories:
(i) mid-aged and (ii) older drivers, in accordance with the classification in some recent
studies in Hong Kong (Li et al., 2016; Chen et al., 2019). Specifically, “mid-aged” drivers
refer to those who are aged from 40 to 55 years, and “older” drivers refer to those who
are aged from 56 to 69 years.
4.2.2 Driving scenario and test procedures
In this study, the experiments were carried out using the OKTAL CDS-650 compact fix-
based simulator and the simulated driving scenarios were developed using the
SCANeRTM studio package. For instance, there are three 32’’ full HD LED monitors
providing a 100o horizontal field of view. Particularly, the simulator is equipped with
force-feedback pedals, steering wheel and indicator of real vehicle (e.g. Peugeot). It is to

56
provide the participants realistic control experience, especially the road texture and kerb
side. Driving and vehicle movement attributes including acceleration, speed, lateral
position, pedal force and steering angle are recorded at a frequency of 100 Hz.
As depicted in Figure 4.1, typical Hong Kong road environment is simulated in the
driving experiment. In particular, buildings, roads, intersections and road furniture in
Sham Shui Po District (a densely populated urban district in Hong Kong) are simulated.
The roads simulated are of three lanes (with on-street parking space on the left hand side)
and single direction. They form a grid network and the speed limit is 50km/h. Also, two
traffic conditions: (i) high traffic flow, more pedestrians on the footpaths and more
surrounding vehicles; and (ii) low traffic flow, less pedestrians and less surrounding
vehicles, are simulated. In high traffic flow condition, there are 10 vehicles moving
around the subject vehicle and 10 pedestrians per 100 meter long footpath. In low traffic
flow condition, there are 2 vehicles moving around the subject vehicle and 0.5 pedestrians
per 100 meter long footpath.
(a) High traffic flow
(b) Low traffic flow
Figure 4. 1 Typical simulated driving scenarios
Each participant was asked to complete one simulated driving session, either under the
low or high traffic condition. Duration of every session was 60 minutes. The scenarios
(high versus low traffic conditions) presented were randomized and counterbalanced
across the participants. In the experiment, participants were asked to drive as if driving a
small passenger car. They were instructed to drive on the middle lane and follow a leading
vehicle, with a comfortable and constant following distance. They were also required not
to overtake during the simulated driving. To assess the drivers’ response, ‘events’ (sudden
brake of leading vehicle as indicated by the ‘brake light’) were induced after 5 minutes

57
and 55 minutes of driving respectively. In particular, the leading vehicle would decelerate
from 50 km/h to complete stop within 3 seconds, stop for 2 seconds, and then accelerate
gradually to 50 km/h again.
4.3 Surrogate safety measures
In 1970s, researcher first attempted to evaluate safety using traffic conflict technique as
defined by the shortest time-to-collision (TTC) (Hayward, 1972). TTC refers to the
remaining time before two vehicles would collide, if there was no evasive maneuver to
avoid a collision. For car-following scenario, there is always a definite TTC when the
speed of leading vehicle is lower than that of following vehicle. When the separation
reduces or the speed difference increases, value of TTC decline. Value of TTC should be
sufficiently small to define a conflict. Threshold of minimum TTC can be defined based
on the driver perception-reaction time plus the time required for evasive maneuver to
avoid collision. In conventional studies, threshold of minimum TTC ranges from 1 to 5
second (Autey et al., 2012; Sayed et al., 2013; Zheng et al., 2014). To indicate the severity
of traffic conflict, two modified TTC-based measures - time exposed time-to-collision
(TET) and time integrated time-to-collision (TIT) were developed (Minderhoud and
Bovy, 2001). Values of TET and TIT are sensitive to the threshold of minimum TTC as
which a traffic conflict is defined. Threshold of 3 second is adopted for this study (Sayed
et al., 2013)
1
.
In this study, surrogate safety measures – TET and TIT are depicted in Figure 4.2. In
particular, TET refers to the duration when a safety-critical situation (i.e. TTC is lower
than the threshold) persists, and TIT refers to the integral that gives the area bounded by
the TTC curve and TTC threshold (during which TTC is lower than the threshold)
respectively. Increases in TET and TIT both indicate the increase in the severity level of
traffic conflict. It should be noted that the TET and TIT could become zero when the
minimum TTC is higher than the threshold (i.e. 3 second). It implies the absence of traffic
1
Different thresholds of minimum TTC (from 1 second to 5 second) were considered in preliminary
analysis. However, influences on the TET and TIT estimates and modeling results were marginal when
reducing the threshold further below 3 second. Hence, threshold of 3 second is considered appropriate.

58
conflict. Additionally, as shown in Figure 2, brake reaction time refers to time lag for the
onset of evasive action (i.e. when the driver of following vehicle presses the brake pedal,
tbr) in response to an event (i.e. sudden deceleration of a leading vehicle, tse). Also,
standard deviation of lateral position (SDLP) and standard deviation of driving speed
(SD_Speed) are employed to assess driver’s lateral and longitudinal controls (Chen et al.,
2019; Li et al., 2016; Shanmugaratnam et al., 2010). Moreover, average speed and time
headway are measured to examine the possible compensatory behaviors (Andrews and
Westerman, 2012; Martchouk et al., 2011; Ni et al., 2010).
To sum up, the performance indicators can be classified into three categories: (1) driving
capability, i.e. SDLP, SD_Speed, and brake reaction time (BRT), etc.; (2) compensatory
behavior, i.e. average speed and time headway, etc.; and (3) safety risk , i.e. TET and TIT,
etc. In particular, SDLP, SD_Speed, average speed, and time headway during the five-
minute period prior to the onsets of sudden brake, i.e. [0-5) minute and [50-55) minute
were measured.
Figure 4. 2 Illustration of proposed driving performance indicators
4.4 Statistical method
To accommodate the censoring nature (either left-censored or right-censored) of
dependent variable, Tobit regression was proposed (Tobin, 1958). In road safety research,
Tobit regression approach is commonly used to model the crash rate, which is left-

59
censored (Zeng et al., 2017, 2018; Anastasopoulos et al., 2008, 2012). In this study, the
surrogate safety measures - TET and TIT, are non-negative, continuous, and left censored
at zero. To address the problem of unobserved heterogeneity attributed to repeated
observations (at different driving time), random parameter Tobit regression should be
applied to measure the association between conflict risk and possible factors including
driver age, driving time, and traffic flow condition (Anastasopoulos et al., 2012).
Separated prediction models were established for professional and non-professional
drivers since the effects of possible factors could be different. For instance, the proposed
Tobit model can be specified as,
(1)
where
denotes the performance indicator (i.e. TET and TIT), x denotes the
explanatory variable, β denotes the corresponding coefficient, and ε
it
denotes the
independent residual (ε
it
~ N(0, σ
2
)), of ith participant (i = 1, 2, 3, …, 41) and tth event (t
= 1, 2) respectively.
The parameters are estimated using maximum likelihood approach. To evaluate the effect
of possible factor on the likelihood of traffic conflict, zero sensitivity is estimated using
the formulation specified as (Anastasopoulos et al., 2008),
(2)
where E denotes the expectation of occurrence of traffic conflict (i.e. TET and TIT
being greater than zero), z denotes the normalized variable,
denotes the probability
distribution function, and
denotes the probability density function respectively.
To model the brake reaction time, the random parameter linear model can be specified as,
60
(3)
where
denotes the brake reaction time, x denotes the explanatory variable, β denotes
the corresponding coefficient, and ε
it
denotes the independent residual (ε
it
~ N(0, σ
2
)), of
ith participant (i = 1, 2, 3, …, 41) and tth event (t = 1, 2) respectively.
To access the goodness-of-fit of proposed models, Maddala R
2
and likelihood ratio test
statistics would be estimated (Maddala, 1986; Anastasopoulos et al., 2008). In this study,
parameter estimations of proposed models are carried out using the software package
NLOGIT 5.0.
4.5 Results
Table 4.2 summarizes the performances (i.e. driving capability, compensatory behavior,
and safety risk) of simulated driving tests, with respect to driver type and age group. As
shown in Table 4.2, TIT and TET of older drivers are lower than that of the counterpart.
Also, average BRT of mid-aged drivers is lower than that of older drivers.
Table 4. 2 Summary statistics for the simulated driving tests
Scope of work
Driving
performance
indicator
Professional driver
Non-professional driver
Mid-aged
Older
Mid-aged
Older
Mean
S.D.
Mean
S.D.
Mean
S.D.
Mean
S.D.
Driving capability
SDLP (m)
0.14
0.03
0.15
0.05
0.16
0.04
0.17
0.07
SD_Speed (km/h)
2.64
1.13
2.61
1.01
2.64
0.84
2.32
0.62
BRT (s)
1.18
0.32
1.35
0.42
1.26
0.32
1.46
0.47
Compensatory
behavior
Average speed
(km/h)
51.20
1.25
51.38
1.60
51.91
2.16
50.61
1.26
Time headway (s)
2.25
0.56
2.50
0.59
2.20
0.44
2.42
0.59
Collision risk
TET (s)
1.32
0.43
0.70
0.63
1.17
0.53
0.78
0.60
TIT (s
2
)
1.10
0.71
0.51
0.68
1.01
0.79
0.63
0.70
61
4.5.1 Driving capability
In this study, driving capability measures considered are SDLP, SD_Speed, and BRT.
SDLP reflects the ability of a driver to maintain lateral stability. Increase in SDLP
indicates the degradation of lateral control performance. As shown in Table 4.3, traffic
flow condition, event time, driver type, and driver age are found significantly associated
with the lateral stability all at the 5% level. For instance, SDLP of professional drivers
are lower than that of the non-professional drivers. Also, SDLP of older drivers are higher
than that of the younger drivers. In addition, SDLP after prolonged driving and under the
high traffic flow condition are found to be higher.
On the other hand, SD_Speed reflects the driver’s capability of longitudinal control.
Increase in SD_Speed implies the incapability to maintain good longitudinal control. As
also shown in Table 4.3, SD_Speed when driving under the high traffic flow condition
are higher than that when driving under the low traffic flow condition. However, no
evidence can be established for the association between longitudinal control, driver type,
and driving time. Lastly, BRT of older drivers are significantly longer than that of mid-
aged drivers. Also, BRT increase when driving under the high traffic flow condition and
after driving for 55-minute, all at the 1% significant level.
4.5.2 Compensatory behaviour
In this study, compensatory behaviour is indicated by the average driving speed and time
headway in the car-following task. As shown in Table 4.4, separated prediction models
are established for professional drivers and non-professional drivers. As shown in Table
4.4(a), there exists difference in the contributing factors to average driving speed between
professional and non-professional drivers. For non-professional drivers, driver age and
event time significantly affect the average speed, at the 1% level. Results indicate that
older non-professional drivers tend to drive at a lower speed in the car-following task, as
compared with the mid-aged non-professional drivers. In addition, non-professional
drivers would reduce the driving speed after prolonged driving. In contrast, no evidence
can be established for the association between the average driving speed of professional
drivers and the factors including driver age, driving time, and traffic flow condition. As
shown in Table 4.4(b), driver age and traffic flow condition are found associated with the
62
time headway of professional drivers. Older professional and older non-professional
drivers tend to keep a longer time headway when following a leading vehicle. In addition,
professional drivers tend to keep a longer time headway when driving under the high
traffic flow condition.
4.5.3 Safety effectiveness of the compensatory strategy
To indicate the effectiveness of compensatory driving behavior in enhancing driving
safety, two safety surrogate measures - TET and TIT are used. Table 4.5 illustrates the
results of random parameter models for the association between safety risk and possible
contributory factors. Zero sensitivity indicates to the changes in the likelihood of the
prevalence of traffic conflict (i.e. TET and TIT being greater than zero) given the per unit
change of possible attribute. As shown in Table 4.5(a), TET of older drivers is
significantly lower than that of mid-aged drivers, both for the professional drivers (at the
1% level) and non-professional (at the 5% level) drivers. This implies the lower likelihood
of severe traffic conflict of older drivers. In particular, the zero sensitivity of older driver
is -3.8% for professional drivers and -2.6% for non-professional drivers respectively. In
other words, the compensatory driving behaviors of older drivers are effective in reducing
the likelihood of traffic conflict, especially for the professional drivers. Similar findings
could be revealed for TIT. Again, as shown in Table 4.5(b), TIT of older drivers is
significantly lower than that of mid-aged drivers, both for the professional (at the 1%
level) and non-professional (at the 5% level) drivers. Also, reduction in the likelihood of
traffic conflict of older professional drivers (-4.0%) is more remarkable than that of older
non-professional drivers (-2.8%).
For the effect of time, as shown in Table 4.5(a), TET after driving for 55 minutes is
significantly lower than that after driving for 5 minutes among the professional drivers.
This implies the reduction in possible collision risk after prolonged driving. Specifically,
the zero sensitivity of event time for TET of professional driver is -2.1%. In contrast, no
evidence can be established for the relationship between TET and event time among the
non-professional drivers. Similar findings are revealed for TIT. Again, as shown in Table
4.5(b), TIT after driving for 55 minutes is significantly lower than that after driving for 5
63
minutes among the professional drivers, at the 1% level. In particular, the zero sensitivity
of event time for TIT of professional driver is -3.3%.
For the effect of traffic flow condition, as shown in Table 4.5(a) and Table 4.5(b), except
for the TET of professional driver, the likelihood of severe traffic conflict under the high
traffic flow condition is higher than that under the low traffic flow condition, both for the
professional and non-professional drivers. In particular, increase in the likelihood of
traffic conflict among non-professional drivers (4.2%) is apparently higher than that
among professional drivers (2.5%).

64
Table 4. 3 Estimation results of random intercept models for driving capability
Factor
Attribute
SDLP
SD_Speed
BRT
Coefficient
z-statistic
Coefficient
z-statistic
Coefficient
z-statistic
Constant
Mean
0.145**
24.08
2.321**
19.00
0.933**
13.67
S.D.
0.046**
19.29
0.731**
12.96
0.154**
4.65
Traffic flow
condition
High traffic flow
0.011*
2.08
0.305**
2.85
0.269**
4.41
(Control: Low traffic)
Event time
55 minutes
0.016**
3.11
0.192
1.76
0.360**
5.69
(Control: 5 minutes)
Driver type
Professional
-0.023**
-4.50
0.146
1.36
-0.075
-1.20
(Control: Non-professional)
Driver age
Older
0.014**
2.63
-0.192
-1.80
0.199**
3.20
(Control: Mid-aged)
Unrestricted loglikelihood
147.29
-88.93
-18.90
Restricted loglikelihood
126.21
-104.99
-40.66
Likelihood ratio test statistics
42.16**
32.12**
43.52**
* Statistical significance at the 5% level
** Statistical significance at the 1% level

65
Table 4. 4 Estimation results of random intercept models for compensatory behavior
(a) Average speed
Factor
Attribute
Professional driver
Non-professional driver
Coefficient
z-statistic
Coefficient
z-statistic
Constant
Mean
51.338**
143.74
52.134**
129.03
S.D.
0.792**
3.37
1.165**
6.65
Traffic flow
condition
High traffic
-0.011
-0.03
0.582
1.50
(Control: Low traffic)
Event time
55 min
-0.261
-0.69
-1.084**
-2.63
(Control: 5 min)
Driver age
Older
0.178
0.46
-1.299**
-3.41
(Control: Mid-aged)
Unrestricted loglikelihood
-65.09
-81.27
Restricted loglikelihood
-66.45
-90.08
Likelihood ratio test statistics
2.72
17.62**
* Statistical significance at the 5% level
** Statistical significance at the 1% level
(b) Time headway
Factor
Attribute
Professional driver
Non-professional driver
Coefficient
z-statistic
Coefficient
z-statistic
Constant
Mean
2.038**
14.79
2.264**
22.15
S.D.
0.371**
5.75
0.376**
6.96
Traffic flow
condition
High traffic
0.302*
2.42
-0.129
-1.25
(Control: Low traffic)
Event time
55 minutes
0.099
0.78
0.010
0.09
(Control: 5 minutes)
Driver age
Older
0.276*
2.18
0.216*
2.05
(Control: Mid-aged)
Unrestricted loglikelihood
-25.38
-28.36
Restricted loglikelihood
-32.76
-34.33
Likelihood ratio test statistics
14.76*
11.94*
* Statistical significance at the 5% level
** Statistical significance at the 1% level
66
Table 4. 5 Estimation results of random parameter Tobit models for safety risk
(a) TET
Factor
Attribute
Professional driver
Non-professional driver
Coefficient
Zero
sensitivity
Coefficient
Zero
sensitivity
Constant
1.38**
--
1.05**
--
Traffic flow
condition
High traffic
0.29
--
0.44*
2.31%
(Control; Low traffic)
Event time
55 minutes
-0.40**
-2.14%
-0.28
--
(Control: 5 minutes)
Driver age
Older
(Control: Mid-aged)
Mean
-0.72**
-3.84%
-0.50*
-2.63%
S.D.
0.58**
0.52**
Unrestricted loglikelihood
-30.53
-39.64
Restricted loglikelihood
-41.42
-47.71
Likelihood ratio test statistics
21.78**
16.14**
Maddala R
2
0.44
0.31
* Statistical significance at the 5% level
** Statistical significance at the 1% level
(b) TIT
Factor
Attribute
Professional driver
Non-professional
driver
Coefficient
Zero
sensitivity
Coefficient
Zero
sensitivity
Constant
1.18**
--
0.75*
Traffic
flow
condition
High traffic
0.47**
2.48%
0.78**
4.15%
(Control: Low
traffic)
Event
time
55 minutes
-0.63**
-3.34%
-0.40
--
(Control:5
minutes)
Driver age
Older
(Control:
Mid-aged)
Mean
-0.76**
-4.00%
-0.53*
-2.79%
S.D.
0.64**
0.52**
Unrestricted loglikelihood
-36.84
-46.57
Restricted loglikelihood
-42.26
-54.74
Likelihood ratio test statistics
10.84**
16.34**
Maddala R
2
0.25
0.31
* Statistical significance at the 5% level
** Statistical significance at the 1% level
67
4.6 Discussion
This study attempts to investigate the compensatory behavior of professional drivers,
coping with the elevated safety risk attributed to ageing, using the driving simulator study.
Many modern societies are facing the problem of ageing population. The proportion of
older peoples who hold driving licensing has been increasing rapidly. There is great
concern for the prevalence of older drivers in the transport sector, since the drivers’
physiological and cognitive performances may deteriorate with the increase in age.
However, as evidenced in this study, older drivers could reduce the anticipated risk by
compensatory behaviors, such as intentionally reducing the speed and increasing the time
headway when following a car. Furthermore, professional drivers usually have better
driving skills, such as detecting the road hazards and adapting for the demanding driving
task. This research provides a significant contribution to furthering our understanding of
the safety of older professional drivers by filling the knowledge gap on the difference in
compensatory driving behavior between professional and non-professional drivers.
This study found that degraded lateral control performance and longer brake reaction time
among older drivers, as compared with mid-aged drivers. This aligns with the previous
findings that driving performance deteriorates with age because of the impairments on
physical and cognitive performance (Biernacki and Lewkowicz, 2020; Chen et al., 2019;
Andrews and Westerman, 2012; Shanmugaratnam et al., 2010). Indeed, older drivers tend
to have longer perception-reaction time. It could then result in the delay and even absence
of evasive maneuver (Islam and Mannering, 2006; Yan et al., 2005).
However, this study also found that older drivers tend keep a longer time headway and
lower driving speed in the car-following tasks. Such findings justify that compensatory
behavior is prevalent among the older drivers (Dykstra et al., 2020; Molnar et al., 2008).
Indeed, previous studies revealed that older drivers tend to compensate for the elevated
crash risk resulted from cognitive impairment by reducing the driving speed and
increasing the time headway in car-following process (Bao et al., 2020; Martchouk et al.,
2011; Ni et al., 2010; Shinar et al., 2005). Furthermore, it is revealed that compensatory
behaviors (e.g. to keep a longer time headway) are more effective in reducing the safety
risk of older professional drivers, as compared to the non-professional drivers.
68
Above finding indicates that age should not be the only consideration for human resource
management of transport operators. For example, some bus drivers in Hong Kong are
compelled to work part-time or retire when they reach their 60s, without undergoing any
health and driving capability assessment. This study also provides useful insights into the
driver licensing policy for the transport authority. Licensing requirements for older
drivers vary among jurisdictions. Policy strategies including shortened time intervals
between license renewals, mandatory health assessments, visual acuity checks and
driving tests, and defensive driving courses for older drivers are implemented (Transport
Department of HKSAR, 2020; Transport for New South Wales, 2015; Thomas et al.,
2013). It would be of essence to assess the capability of compensatory strategy of older
drivers in the driving tests for license renewals. In addition, older professional drivers can
shed some light on the driving skills for the younger cohorts.
4.6.1 Effective compensatory strategy of professional drivers
The findings of this study showed that older professional drivers showed a greater
reduction in the likelihood of traffic conflict. In other words, the compensatory strategy
adopted by the older professional drivers is more effective as compared with the older
non-professional drivers. This is consistent to the findings of previous studies that
existence of compensatory strategy is closely related to driving experience (Farrow and
Reynolds, 2012; Andrews and Westerman, 2012). Professional drivers are good at
identifying hazards since they have higher exposure on roads. Therefore, their driving
performances are better than that of non-professional drivers (Borowsky and Oron-Gilad,
2013). As experience accumulated over times, older professional drivers can maintain the
satisfactory driving performance (Newnam et al., 2018; Chen et al., 2019). While a recent
study reported that the driving experience of older professional drivers can not
compensate for their reaction slowed down by aging (Medic-Pericevic et al., 2020), our
results provide evidence of effective compensatory strategy reducing their safety risk.
Findings of this research contribute further to the literature on the safety of older
professional drivers from the behavioral perspectives. Transport operators can develop
tailored management strategies for older drivers to keep the drivers in the workforce for
as long as safely possible (Newnam et al., 2020; Newnam and Watson, 2011). For
69
example, regular assessments of cognitive performance and driving skills (including
effective compensatory behaviors) for the older drivers can be implemented. In addition,
training courses and driver enhancement programs on hazard identification and defensive
driving skills can be provided. Yet, it is worth exploring the relationship between driver
performance, safety perception and hazard identification skills based on cognitive
assessment and perception survey in the extended study (Chen et al., 2020).
4.6.2 Strategic adaptation of professional driver
Strategic adaptation refers to the intentional modification of driving behavior to adapt for
the prolonged driving or hazardous conditions. It is expected that strategic adaptation of
professional drivers is more prevalent than the non-professional drivers, and the elevated
crash risk of professional drivers after prolonged driving can be marginal. For the effect
of driving time, our results showed the impaired lateral control and longer brake reaction
time after driving for 55 minutes, as compared with those after 5 minutes. This could be
attributed to the existence of possible psychological fatigue. As also indicated in previous
driving simulator studies, greater variations in lateral position, longitudinal speed and
steering angle were observed after driving for 30 to 60 minutes (Chen et al., 2019; Ting
et al., 2008; Otmani et al., 2005). Interestingly, despite the degraded driving performance
and slower response over time, results indicate that the likelihood of traffic conflict of
professional drivers remarkably reduced after driving for 55 minutes, while there was no
such finding for the non-professional drivers. One possible explanation is that
professional drivers adopted strategic adaptation – that is, adjusting their behaviors to
accommodate the driving task. For example, professional drivers may adapt to the
situation by reducing the driving speed where appropriate (Smiley and Rudin-Brown,
2020; Williamson et al., 2002; Cnossen et al., 2004). In particular, detection of possible
fatigue and potential road hazards could trigger the strategic adaptation of professional
drivers (Filtness et al., 2012; Williamson et al., 2014). Meng et al.’s (2015) study suggests
that professional drivers are usually more confident in coping with fatigue given the rich
experience in long driving and working time. Moreover, Iseland et al.’s (2018) study
affirms that long-haul truck drivers usually engage in various secondary tasks
intentionally to get rid of the tedious driving task and maintain the level of alertness. Just,
no evidence could be established for the association between prolonged driving time and
70
presence of adaptation behaviors (e.g. reduction in driving speed or increase in time
headway) among the professional drivers in this study. As such, it is worth exploring the
adaption behavior of professional driver using alternate behavioral and psychological
metrics in the extended study.
Moreover, current study also considers the effects of traffic flow condition on the driving
capability, compensatory behavior, and safety risk. Results indicate the increase in brake
reaction time, and the degradations in lateral and longitudinal controls when driving under
high traffic condition. It could be attributed to the increase in visual stimuli and mental
workload, given the increase in surrounding vehicular traffic and pedestrian (Cantin et
al., 2009). However, though professional drivers tend to adopt the longer time headway
under the high traffic condition, current results indicate that their safety risk still increases.
It is worth exploring the relationship between traffic volume, strategic adaptation and
potential crash risk based on empirical observation survey in the extended study.
4.6.3 Study limitations
The findings from this research should be interpreted in the context of the limitations.
First, the ability of simulator studies to reflect realistic driving is often questioned.
However, many previous studies have demonstrated the absolute and relative validity of
the simulator experiment (Wynne et al., 2020; Meuleners and Fraser, 2015). Moreover,
the real-world driving data have been successfully explained by the findings from the
simulator research (Saifuzzaman et al., 2015). In this study, a high-fidelity driving
simulator was used. The driving scenario replicating the local environment in Hong Kong
was created with high-resolution images trying to simulate the real-life scenery as much
as possible. Nevertheless, naturalistic driving studies could aid in understanding the
interaction between the compensatory strategy of older drivers and the increased driving
experience of professional drivers.
Second, as compared with the random parameters linear model, hazard-based duration
models can be applied to analyse drivers’ reaction times to improve the estimation
accuracy in future study (Ali et al., 2019; Choudhary and Velaga, 2017). For example,
Haque and Washington (2014, 2015) used a parametric accelerated failure time (AFT)
71
duration model with a Weibull distribution to identify the factors affecting drivers’
reaction times. Results confirmed that the Weibull-AFT model with gamma heterogeneity
showed the best statistical fit.
Third, the cognitive ability of older drivers is not examined in current study. As
compensatory strategy is prevalent for the drivers who have known cognitive impairment,
traffic violation and crash involvement records (Wong et al., 2012; Molnar et al., 2008;
Charlton et al., 2006), it is worth collecting the data of safety perception, hazard
identification skills, and cognitive ability. Therefore, the association between these
human factors and compensatory strategy of older professional drivers can be measured.
Forth, the driving simulator experiment in this study involves the car-following task for
one hour. Presence of strategic adaptation is examined based on the changes in driving
performances between two time points (i.e. 5 minute and 55 minute). Despite that possible
driving simulator sickness can be avoided, one-hour drive may not be sufficient to induce
driver fatigue. In the extended study, it is possible to investigate the strategic adaptation
behaviors of long-haul drivers using naturalistic driving study (Mahajan et al., 2019).
Moreover, car following behavior of professional drivers at work could be influenced by
time pressure and market competition. However, it is not possible to incorporate the effect
of work pressure in the driving simulator study. In the extended study, it is worth
exploring the effect of work pressure when comprehensive information is available using
naturalistic driving study. Also, robustness of the results can be improved when the
sample size of each experimental group increases.
4.7 Concluding remarks
This simulator study investigated the effectiveness of the compensatory strategy adopted
by older professional drivers as compared with older non-professional drivers.
Specifically, the safety effects of compensatory behaviors on the rear-end conflict risk
were examined. Two modified traffic conflict measures: time exposed time-to-collision
(TET) and time integrated time-to-collision (TIT) were adopted to indicate the risk of
severe rear-end traffic conflict in the car-following tasks. Possible changes in the conflict
risk could indicate the effectiveness of compensatory strategy. Results reveal the longer
72
brake reaction time and greater variability in lateral position of older drivers as compared
with the mid-aged drivers, while the time headway of older drivers is longer. This
demonstrates the degradation in driving capability and the presence of compensatory
behavior among older drivers. More importantly, the effectiveness of compensatory
strategy is more profound among the older professional drivers, as compared to the older
non-professional drivers, given that the reduction in conflict risk among professional
drivers is more remarkable. The focus of existing research has tended to be on the
compensation mechanism of older drivers while few have considered that of the older
professional drivers. As anticipated, older professional drivers are able to adopt more
effective compensatory strategy to reduce the rear-end crash risk by capitalizing on their
rich experience. In the near future, the proportion of older drivers in the transportation
industry would continue to increase and older drivers would become a major cohort.
Findings of this research provide useful insights into the driver management strategies
tailored for older drivers. For example, not only the regular health checks, but also the
comprehensive assessments of cognitive performance and driving skills for older drivers
should be introduced. Furthermore, special training program that can improve the hazard
identification and defensive driving skills of professional drivers will be of essence. Yet,
it is worth investigating the effectiveness of driver education and training in improving
the safety of older professional drivers in the long run.
73
Chapter 5 Perceptions and attitudes of professional drivers
5.1 Introduction
In this study, we examine the effectiveness of a fixed ASEC system in Hong Kong to
deter speeding. While Hong Kong employs a combination of human agent-based mobile
speed enforcement mechanisms as well as a fixed ASEC system, the focus will be on a
fixed ASEC system in this paper. In Hong Kong, the shares of speed enforcement
prosecutions based on human agent-based mobile speed enforcement and a fixed ASEC
system are about the same (Hong Kong Police Force, 2018). From time to time, strong
public sentiment has been expressed to expand the ASEC system as a means not only to
enhance the deterrent effect, but also to reduce the costs associated with police human
resources. In this context, it become particularly imperative to evaluate the impacts of
alternative designs for such an expanded ASEC system. While there may be benefits to
supplementing an expanded automation-based ASEC speed enforcement mechanism
with a much smaller base (relative to today) of human-based enforcement mechanisms,
examining the possible optimal combination of investments in such fused mechanisms is
not considered here. In any case, society has consistently moved closer to automation in
traffic operations, and it is not inconceivable at all that there will be a time in the near
future when no human-based resources (police personnel) will be invested on the task of
field monitoring of speed for enforcement purposes.
Four main attributes associated with threat and coping appraisals related to an ASEC
system are evaluated in the paper: DOP penalty, fine levels, camera-to-housing ratio
(explained in detail later), and the placement of the warning sign. Among these four
attributes, the first three may be considered to be associated with threat appraisal, while
the last may be considered to be associated with coping appraisal (for instance, if a
warning sign is placed farther away from the camera location, it may provide individuals
with more time to absorb the information and act to adjust their speed to comply with the
speed limit before arriving within the range of the camera detection zone). A stated
preference experiment is conducted by developing scenarios that combine the attribute
levels of the four attributes just identified. The scenarios are presented to professional
74
drivers, who are asked to respond by choosing a speed level at which they would travel
on a 50 km/h road at each of three sections of a roadway (corresponding to a standard
section with no enforcement and no warning, a warning section that starts from 23 meters
ahead of the placement of a warning sign, and the camera housing section itself in which
a camera detects speeding violations).
Driver perceptions regarding speeding consequences and driving history (current level of
DOP points, whether received a speeding ticket in the past 12 months, and exposure to
ASEC systems when driving), as well as driver demographic characteristics and
employment characteristics, are also collected in the survey. These variables are
considered as direct influencers of travel speed as well as moderating the impact of the
four main attributes of the SP experiment (to capture inter-individual differences in
perceptions of threat appraisal and coping appraisal of speed enforcement, as well as
overall intentions to speed or not and general attitudes toward the risks travel speeding
poses to society). In doing so, we attempt to recognize the direct and moderating effects
of driver characteristics on travel speed levels, and contribute further to the literature on
the effectiveness of speeding enforcement mechanisms. Many earlier studies of
enforcement mechanisms, on the other hand, have considered drivers as a single
monolithic group or considered variations across drivers in a relatively limited manner.
In addition, unlike many other earlier studies on professional driver speed decisions, we
consider unobserved individual-specific heterogeneity to accommodate unobserved
individual factors that are likely to influence speed choices. Such heterogeneity is
important to consider in travel choice and safety studies to ensure consistent estimation
of model parameters (see, for example, Mannering et al., 2016).
In this chapter, Section 5.2 and 5.3 discusses the stated preference survey used for data
collection as well as the methodology for our analysis, respectively. Section 5.4 provides
a description of the sample used in the analysis. Section 5.5 presents the results. Section
5.6 concludes the paper with a summary of the findings and policy implications.
75
5.2 Stated preference survey design
The data used in the current analysis is drawn from a face-to-face survey conducted
during the period from October 2018 to February 2019 (months inclusive). Our emphasis
on a face-to-face survey is to avoid respondent biases that may accrue from less expensive
web-based and other social media-based surveys. The professional driver participants
were approached either at on-road parking areas (e.g. public bus, taxi, and public light
bus stations) or outside the licensing offices of the Hong Kong Transport Department.
The inclusion criteria were (1) having valid licences of bus, minibus, taxi or goods (cargo)
vehicles, and (2) driving for income, either full-time or part-time. Prior to the survey, the
ethical approval from the Human Subjects Ethics Sub-committee (HSESC) of the Hong
Kong Polytechnic University was obtained.
The questionnaire had three sections: (1) SP questions regarding speed choices, (2)
Driving history and safety perceptions, and (3) Demographics and employment
characteristics of professional drivers. The SP part is discussed in the next section. The
second section collected information on the involvement with traffic offences and
crashes, attitudes towards different speed enforcement measures, and actual experience
with speed enforcement. The third section collected information on driver demographics
(gender, age, education, marital status, and income) and employment characteristics
(salary system, driving hours per day etc.)
In this study, drivers’ perceptions and attitudes towards the deterrent effect of
enforcement and penalty against speeding was gauged using their stated speed choices in
an SP survey design. SP surveys have been widely applied to evaluate the effects of
enforcement strategies and speeding penalties on the propensity for traffic offences by
measuring the driver’s response under hypothetically constructed conditions (Hössinger
and Berger 2012; Li et al., 2016; Ryeng, 2012; Wong et al., 2008). The SP questions in
the current paper are based on the scenario of driving on an urban road with a speed limit
of 50km/h. For each question, three speed choices are presented to drivers for each of
three location sections. The location sections are defined as follows: (1) a standard section,
defined as one with neither ASEC-based speed enforcement and nor warning signs of
such enforcement, (2) a warning section, defined as the road section indicating the

76
presence of speed camera housing unit ahead (this section starts 23 meters ahead of the
warning sign and ends at the location of warning sign; the design of the section length is
based on the vision standard for the driver licensing requirement in Hong Kong), and (3)
a camera section, defined as being within the range of speed violation detection by the
camera (this section starts 23 meters ahead of a camera housing unit and ends at the
location of the housing; see Figure 5.1). The three speed choices (one to be selected) are:
(1) comply with the prescribed speed limit; (2) exceed the prescribed speed limit by 15
km/h or less (traveling at 51-65 kms./hour, corresponding to speeding range 1); and (3)
exceed the prescribed speed limit by more than 15 km/h but less than or equal to 30 km/h
(traveling at 66-80 kms./hour, corresponding to speeding range 2). Thus, for each SP
question presented, the respondent makes a speed choice at each of the three location
sections, providing three choices.
In each of the SP questions presented to respondents, four attributes are used to
characterize the choice context: (1) Driving Offence Points (DOP) for different ranges of
speeding infractions, (2) Monetary fines for different ranges of speeding infractions, (3)
Camera-to-housing ratio, and (4) placement of the warning sign that determines the
distance of the warning section. A screenshot of the content and format of a sample SP
question is provided in Figure 5.1.
The levels of the first attribute - DOP – were set by pivoting off the current DOP for each
of the two speed infraction ranges (of course, there are no DOPs for being within the
speed limit). The current DOPs are zero for speeding range 1 and three for speeding range
2. We used these base DOPs and also introduced a higher DOP level of two for speeding
range 1 and a DOP level of five for speeding range 2. Thus, for each speeding range, there
are two possible DOP levels, and across the two speeding ranges, there are a total of four
possible DOP levels.
The levels of the second attribute – monetary fine – were also set based on the current
fine levels of 320 HKD (about US $40) for speeding range 1 and 450 HKD (about US
$57) for speeding range 2. Again, we used these base fine levels, and also introduced
increased levels of 420 HKD (about US $54) for speeding range 1 and 550 HKD (about
77
US $ 70) for speeding range 2. Across the two speeding ranges, there are a total of four
possible fine levels.
In Hong Kong, not all the camera housings necessarily contain a speed camera, to save
on costs (both installation and operating costs). Thus, while Hong Kong laws require that
citizens be informed of any camera locations, it is not required that all the announced
camera locations necessarily have an actual functional camera. Dummy camera housing
boxes are allowed to be installed. However, the ratio of actual speed cameras to camera
housings must be publicized. The current ratio of speed camera-to-housing is 1:6. In
particular, there are 20 speed cameras and 120 housings across the entire territory of Hong
Kong (Audit Commission of HKSAR, 2013). Four levels of the third attribute -- camera-
to-housing ratio -- are set out by either increasing the number of housings or increasing
the number of cameras: 20:240, 20:120 (status quo), 40:120, and 60:120. An analysis of
how Hong Kong professional drivers respond to different camera-to-housing levels can
inform speed enforcement strategies considering the economic constraints of the transport
authority.
Finally, four levels of the fourth attribute associated with the placement of the warning
sign are considered: 50 meters, 100 meters, 150 meters, and 200 meters upstream of the
speed camera housing (see Figure 5.1). According to the Transport Department, to
remind drivers of the presence of a speed enforcement camera ahead, the distance
between the camera housing unit and the warning sign is about 100m for most of the
enforcement sites. Exploring the effect of the placement of the warning sign helps better
understand alternative coping mechanisms, and can provide insights regarding the
optimal placement of the warning sign that can minimize the “Kangaroo effect”
associated with speed cameras.

78
Scenario 1:
If you are at the Standard section, at which speed range would you travel? (choose one option
from below)
< 50 km/h 51-65 km/h 66-80 km/h
If you are at the Warning Section, at which speed range would you travel? (choose one option
from below)
< 50 km/h 51-65 km/h 66-80 km/h
If you are at the Camera Housing Section, at which speed range would you travel? (choose
one option from below)
< 50 km/h 51-65 km/h 66-80 km/h
Background information
Speed(km/h)
< 50
51 - 65
66 - 80
Penalty for speed
violation
➢ DOPs
➢ Fine
0
0
3
0
HK$ 320
HK$ 450
Camera-to-Housing ratio
20 cameras in 240 housing units
Location of the warning sign
Warning sign placed 50 meters ahead of housing unit
Figure 5. 1 Illustration of the location type and a hypothetical scenario for the stated
preference game
All the levels for each of the attributes were tested extensively for reasonability in pilot
surveys, and several changes were made before arriving at the final levels. In all, the SP
experiments have four factors, each with four levels. If the full factorial design were
considered, there would be 256 (4 4 4 4) combinations of factor attributes in
total for the SP question. It is however not efficient and feasible to gauge the drivers’

79
perceptions and attitudes if all the 256 combinations of scenarios are used. Therefore, an
orthogonal fractional factorial design (Bhat and Sardesai, 2006; Hössinger and Berger,
2012; Lavieri and Bhat, 2019; Li et al., 2014) was adopted to reduce the number of
combinations from 256 to 16. Further, our design enabled us to estimate models that are
more general than the multinomial logit model by maintaining factor orthogonality within
and between alternatives. Our design allowed for the estimation of main effects of
attributes, as well as two-way interaction effects between attributes and respondent
characteristics. Next, we developed a block design of four sets of four SP scenarios,
because it would be too much burden to ask each respondent to answer 16 SP questions.
Each participant was then presented with one of the four blocks of four SP scenarios in
the survey. The entire survey instrument is available at http://www.baige.me/v?i=RxE.
5.3 Data collection and sample used
A total of 401 professional drivers completed the questionnaire survey. Therefore, the
dataset has a total of 40112=4,812 SP choice occasions, with 1,604 choice occasions at
each of the three location sections (standard, warning, and camera). The distribution of
the dependent variable was as follows within the 1,604 choice occasions, as also shown
in Table 5.1: (1) Standard section – Not speeding (14.1%), Speeding Range 1 (71.2%),
and Speeding Range 2 (14.7%), (2) Warning section – Not speeding (57.2%), Speeding
Range 1 (40.0%), and Speeding Range 2 (2.8%), (3) Camera housing section – Not
speeding (99.8%), Speeding Range 1 (0.2%), and Speeding Range 2 (0%). As can be
observed from these descriptive statistics, drivers combine their threat and coping
appraisals due to which a large proportion of them are generally willing to speed at the
standard section (at least at speed range 1), but are more likely to adhere to the speed limit
at the camera housing section. Indeed, there is literally no variation in adherence at the
camera housing section regardless of the levels of DOP, monetary fine, camera-to-
housing ratio, warning sign placement, as well as driver characteristics. Thus, we drop
the 1,604 choice occasion observations corresponding to the camera housing section in
our analysis, because they do not contribute to understanding the effects of independent
variables on speeding ranges. The final sample for analysis includes the 3208 choice
occasions at the standard and warning sections.

80
Table 5. 1 Distribution of speed choices by location type
Section
Speed choice
Speed compliance
Speeding range 1
Speeding range 2
(<50 km/h)
(51-65 km/h)
(66-80 km/h)
Count
%
Count
%
Count
%
Standard
226
14.1
1142
71.2
236
14.7
Warning
918
57.2
641
40.0
45
2.8
Camera Housing
1600
99.8
4
0.2
0
0
Table 5.2 shows cross-tabulations of the four SP attributes with speed choice percentages
at each of the standard and warning sections. As expected, increasing the DOP penalty
by two points decreased the percentage of drivers choosing for speeding range 1 and
speeding range 2 in the standard section. Further, increasing the DOP penalty by two
points for both speeding levels led to a greater percentage of drivers complying with speed
limit. The descriptive statistics do not show a clear trend of the speed choices with respect
to increasing monetary fines. Interestingly, in the standard section, it seems that a greater
proportion of drivers choose to speed when the fine is increased. More discussion on this
will follow in the model results section. In the context of camera-to-housing ratio values,
an increase in the ratio from status quo (20:120) to 40:120 shows a greater decrease in the
percentage of drivers choosing speed ranges 1 or 2 than that from increasing the ratio
further to 60:120. It appears that the bang per buck is greater for increasing the ratio from
20:120 to 40:120 than that to 60:120. As for the placement of warning sign, there is a
monotonous trend of increasing percentage of speed compliance choice with decreasing
distance between the warning sign and the camera housing location.
Of course, the discussion above does not consider differential effects of the SP attributes
based on observed and unobserved driver characteristics, which is the focus of the
multivariate model results in Section 5.4.
81
Table 5. 2 Crosstabulation of SP attributes with speed choices at plain and warning sections
Factor
SP attribute level for different
speeds (<50kmph, 51-65kmph,
66-80kmph)
Speed choice %
Standard section
Warning section
Speed
compliance
Speeding
range 1
Speeding
range 2
Speed
compliance
Speeding
range 1
Speeding
range 2
<50 51-65 66-80 km/h
DOPs
0 0 3 (status quo)
13.2%
69.6%
17.2%
54.6%
2.6%
2.8%
0 0 5
12.0%
73.6%
14.4%
52.5%
3.8%
3.7%
0 2 3
13.2%
68.6%
18.2%
53.7%
4.3%
2.0%
0 2 5
15.5%
73.1%
11.4%
68.1%
9.2%
2.7%
Monetary fine (HK$)
0 320 450 (status quo)
11.8%
73.3%
14.9%
54.8%
1.3%
3.9%
0 320 550
15.2%
64.6%
20.2%
57.4%
9.9%
2.7%
0 420 450
14.5%
78.6%
6.9%
59.9%
8.7%
1.4%
0 420 550
15.0%
67.3%
17.7%
56.9%
0.1%
3.0%
Camera-to-Housing ratio
20:240
12.7%
71.8%
15.5%
57.9%
8.7%
3.4%
20: 120 (status quo)
13.5%
67.3%
19.2%
55.6%
0.1%
4.3%
40:120
13.7%
72.6%
13.7%
58.4%
8.7%
2.9%
60:120
16.2%
72.1%
11.7%
56.1%
2.4%
1.5%
Placement of warning sign
50m upstream
--
--
--
77.8%
2.2%
0%
100m upstream (status quo)
--
--
--
65.3%
1.2%
3.5%
150 m upstream
--
--
--
43.1%
3.9%
3%
200m upstream
--
--
--
42.6%
1.6%
5.8%

82
5.3.1 Driver demographics and employment characteristics
Table 5.3 presents the demographic and other characteristics of the 401 participants,
beginning with the demographic characteristics in the first set of rows. All participants of
this study are male. This is consistent with the distribution of employed persons by
occupation and gender in the population census dataset, which indicates that 97% of
workers in the machine operation sector are male (Census and Statistic Department,
2018a). Although the information on the official registry of professional drivers in Hong
Kong is not available, male drivers are believed to dominate the transport sector. The age
distribution of our sample is close to that of the driving licensing record of general drivers
in Hong Kong (Transport Department, 2017a). In terms of educational background, 79%
of the drivers in our sample have attained at least secondary education (the closest
possible comparison at the Hong Kong-wide level is that 89% of male workers in Hong
Kong have attained secondary education (Census and Statistic Department, 2018b). In
our sample, 73% of the drivers were married (the closest possible comparison is the most
updated marital status statistics in Hong Kong, which indicates that 62% of the males are
married (Census and Statistic Department, 2018c). Interestingly, almost all (395 of the
401) drivers provided their monthly income values. For the remaining six drivers who did
not provide this information, we imputed the income values based on the procedure
discussed in Bhat (1997). A little over 31% of the drivers have a monthly income below
HK$ 15,000 and a little over 21% of the sample earn over HK$ 20,000.
Table 5. 3 Distribution of the sample
Variable
Count
%
Demographics
Gender (Male)
401
100%
Age
Older (>55 years old)
98
24.4
Younger (<45 years old)
151
37.7
Mid-aged (46-55 years old)
152
37.9
Education
Primary or below
84
20.9
Secondary or above
317
79.1
Marital status
Married
293
73.1
Unmarried
108
26.9
Monthly income

83
less than 15K
127
31.7
Between 15K and 20K
183
45.6
More than 20K
85
21.2
Operational characteristics
Salary system
Trip-based
136
33.9
Monthly-based
126
31.4
Others (hourly or shift based)
139
34.7
Daily driving hours
More than 9 hours
168
41.9
Less than 8 hours
39
9.7
8 to 9 hours (normal working hours)
194
48.4
Work time per week
less than or equal to 48 hours
184
45.9
more than or equal to 63 hours
37
9.2
Others
179
44.9
Vehicle type
Bus
67
16.7
Taxi and Red Minibus
157
39.2
Green minibus
56
14.0
Goods vehicle
121
30.2
Driver history and safety perceptions
Received speeding ticket(s)
Yes
99
24.7
No
302
75.3
Perceive speeding as a cause of injury
High
281
70.1
Low
6
1.5
Neutral
114
28.4
Perceive speeding cameras are effective
High
270
67.3
Low
24
6.0
Neutral
107
26.7
Frequency of sighting cameras
High (7-10 times in 10 trips)
250
62.3
Medium (4-6 times in 10 trips)
98
24.4
Low (0-3 times in 10 trips)
53
13.3
Drivers’ employment characteristics are presented in the next set of rows in the table. The
salary system of professional drivers is stratified into three categories: (i) trip-based (34%
of the sample), (ii) monthly-based (31%), and (iii) others (hourly or shift based, 35%).
The trip-based drivers are self-employed, and their incomes vary greatly with the number
and distance of trips made (e.g. taxi, red minibus and light van drivers). The drivers who
84
are paid on a monthly basis are usually regular employees of a large corporation or
transport operator, such as the franchised bus companies and logistic firms. The hourly
or shift based drivers are usually (full-time or part-time) employees of small transport
operators, such as the green minibus. Their salaries vary greatly with the daily working
time. As for the daily driving hours, 8% of our sample drive for less than or equal to 7
hours per day while 42% of them drive for more than 9 hours daily. The corresponding
statistic from official reports is not accessible. The closest possible comparison is that 51%
of bus drivers in Hong Kong drive for more than 9 hours daily (Legislative Council of
HKSAR, 2018). In terms of weekly working hours, 46% of drivers in our sample work
for 48 hours or less per week, which is comparable to the 50% of employees in the
transport sector who work for less than or equal to 48 hours a week. However, only 9%
of our sample work for more than or equal to 63 hours per week, while the corresponding
percentage in the transport sector is close to 25% (Census and Statistic Department,
2018b). The commercial vehicles driven by our sample are categorized into four types –
bus, green minibus, taxi and red minibus, and goods vehicles (accounting for 17%, 14%,
39%, and 30% of the sample respectively). The official distribution for the vehicle types
of the commercial vehicle fleet in Hong Kong is not accessible.
Overall, the characteristics of drivers in the sample are reasonably close to general
expectations for Hong Kong professional drivers, at least based on the latest statistics
gleaned from the Census. Of course, one cannot be conclusive of the true
representativeness of our sample because there is no official registry of professional
drivers in Hong Kong, and the closest comparison we are able to make is with the
population census demographics for people employed in the transport sector.
5.3.2 Driver history and safety perceptions
The last set of rows in Table 5.3 report the descriptive statistics for driving history and
safety perceptions of the 401 participants, which might influence how they would respond
to the SP choice questions. As can be observed from these rows, 25% of the interviewed
professional drivers have received at least one speeding ticket in the recent past. 70% of
the drivers perceived speeding as a cause of injury while only 1.5% perceived a small
effect of speeding on traffic injuries. As for the perception on effectiveness of cameras,
85
67% of drivers believed that speeding cameras are effective in catching offenders, while
a smaller percentage (6%) perceived low effectiveness of this enforcement technique. The
frequency of drivers sighting camera housings was also collected in terms of the number
of times a driver would sight camera housings in 10 trips. It appears that a majority (62%)
of the drivers do usually visually locate camera housings at a frequency of at least 7 times
in 10 trips.
All the above driver history and perception variables are likely to influence drivers’
responses to the SP choice questions. Also, while we make no claim of our sample being
representative of the population of professional drivers, there is no reason to believe that
the individual-level relationship we develop between speed range choices and SP
attributes/driver characteristics would not be applicable for the general population of
professional drivers.
5.4 Statistical method
In this study, we formulate a panel mixed multinomial logit (or MMNL) model for the
speed choice of professional drivers. The panel MMNL model formulation
accommodates heterogeneity across individuals due to both observed and unobserved
individual attributes, while also recognizing correlations among the different observations
of a same individual. In the following discussion of the model structure, we will use the
index q (q = 1, 2, …, Q) for the decision-makers, i for the speed alternative (i = 1, 2, …,
I) and k for the choice occasion, i.e. SP choice occasions for a particular decision-maker,
(k = 1, 2, …, K). In the current study I = 3 (as indicated earlier, the choice alternatives are
speed compliance, or speeding range 1, or speeding range 2) and K = 43 = 12 for all q.
Within each of the four SP attribute scenarios presented, the respondents were asked to
state their speed range choice in three different sections – standard, warning, and camera
housing sections.

86
In the usual tradition of utility maximizing models of choice, we write the utility or
valuation that an individual q associates with the alternative i (speed range) on
choice occasion k as follows:
,
(1)
where is a -column vector affecting the valuation of individual q for
alternative i at the k
th
choice occasion, and that includes the following: (1) choice-
occasion specific attributes (that is, the four attributes varied in the SP experiments), (2)
alternative-specific constants for speeding ranges 1 and 2 (with no speeding being the
base category), (3) individual-specific attributes (driving history and perception, driver
demographics and employment characteristics), and (4) interactions within each of the
choice-specific and individual-specific variables, as well as across the two sets of
variables. β is a corresponding -column vector of the mean effects of the
coefficients of on speeding range valuations, and is another -column
vector with its m
th
element representing unobserved factors specific to individual q that
moderate the influence of the corresponding m
th
element of the vector . A natural
assumption is to consider the elements of the vector to be independent realizations
from a normal population distribution; . represents a choice-
occasion specific idiosyncratic random error term assumed to be identically and
independently standard Gumbel distributed. is assumed to be independent of .
For a given value of the vector , the probability that individual q will choose speed
range i at the k
th
choice occasion can be written in the usual multinomial logit form
(McFadden, 1978):
(2)
qik
U
qikqikqqik
xvU
+
+
= )(
qik
x
)1( M
)1( M
qik
x
q
v
)1( M
qik
x
q
v
),0(~
2
mqm
Nv
qik
qik
qk
x
q
v
=
=
+
+
I
j
xvx
xvx
qqik
qjkqqjk
qikqqik
e
e
vP
1
|

87
The unconditional probability can then be computed as:
(3)
where F is the multivariate cumulative normal distribution and σ is a vector that stacks
up the elements across all m. The reader will note that the dimensionality in the
integration above is dependent on the number of elements in the vector.
In the MMNL model, marginal effects are calculated for variables . For the marginal
effects of dummy variables, they are calculated as the differences in the estimated
probabilities when the variables change from 0 to 1, while the means of other variables
are used for the computation. The marginal self and cross effects are computed as
(Shaheed and Gkritza, 2014; Xie et al., 2012; Washington et al., 2020):
P
P (1 P )
qik
m
i qik qik
m
qik
x
=−
(4)
P
PP
qjk
m
i qik qjk
m
qik
x
=−
(5)
where Eq. (4) represents the effect that one unit change in has on the probability
for the decision-maker q to choose the speed alternative i on the choice occasion k
(denoted by P
qik
). Eq. (5) shows the effect of one unit change in the variable m of speed
alternative i (i≠j) on the probability (P
qjk
) for the decision-maker q to choose the speed
alternative j on the choice occasion k.
The parameters to be estimated in the model of Equation (3) are the β and σ vectors. To
develop the likelihood function for parameter estimation, we need the probability of each
individual's sequence of observed SP choices. Conditional on , the likelihood function
for individual q’s observed sequence of choices is:
)|()|(
q
v
qqikqik
vdvPP
q
= F
m
q
v
qik
x
qik
x
q
v
88
(6)
where is a dummy variable taking the value of 1 if the q
th
individual chooses the i
th
speed range in the k
th
occasion, and 0 otherwise. The unconditional likelihood function
for individual q’s observed set of choices is:
(7)
The log-likelihood function is . We apply quasi-Monte Carlo
simulation techniques to approximate the integrals in the likelihood function and
maximize the logarithm of the resulting simulated likelihood function across all
individuals with respect to the parameters β and σ. Under rather weak regularity
conditions, the maximum (log) simulated likelihood (MSL) estimator is consistent,
asymptotically efficient, and asymptotically normal (see Hajivassiliou and Ruud, 1994;
Lee and Carter, 1992; McFadden and Train, 2000).
In the current study, we use Halton sequences to draw realizations for from its
assumed normal distribution. Details of the Halton sequence and the procedure to
generate this sequence are available in Bhat (2001, 2003).
5.5 Results and discussion
Table 5.4 presents the results of a panel mixed multinomial logit model estimated on the
afore-mentioned 3,208 observations – 1604 for the standard section and 1604 for the
= =
=
K
k
I
i
qqikqq
qik
vPvL
1 1
|)|(
qik
=
q
v
qqqq
vdFvLL )|()|(),(
),(ln),(
qq
LL =
q
v

89
warning section
2
– with normal distributed random coefficients
3
. The dependent variable
is speed choice (i.e. speed compliance, speeding range 1, or speeding range 2; with speed
compliance considered as the base alternative). For each independent variable, a common
coefficient was estimated for both standard and warning sections as well as a difference
coefficient was introduced to account for the differential effect of that variable on the
warning section compared to the standard section. In Table 5.4, the parameter estimates
reported under the “Standard section” column are that of the common coefficients, which
may also be interpreted as coefficients for the standard section. The parameter estimates
under the “Difference between Warning and Standard section” column are the difference
coefficients. For a given variable, a sum of its common coefficient and the difference
coefficient would give its coefficient for the warning section. The parameter estimates
are interpreted and discussed next in Sections 5.4.1-5.4.4. The coefficients on the
constants indicate a general aversion to speeding, especially at level 2, at both the standard
and warning sections. This aversion is typically higher in the warning section than in the
standard section, though there is unobserved heterogeneity (captured by the significant
standard deviation estimates on the constants) in these general trends (the panel nature of
the data allows us to estimate the standard deviations on the constants in the table).
An important note is in order here. All results in this paper pertain to the influence of
variables on the reported speed choices in our stated experiments, not actual speed choices
in the real world. But, for presentation ease and tightness, we do not belabour over this
distinction in the rest of this paper and use the general word “speeding”. However, all our
statements should be viewed in the context of stated speed choices, not actual speed
choices.
2
Recall from the descriptive analysis of the SP choice data for the camera housing section that only a
single alternative (speed compliance) was chosen 99.8% of the times. So, these data were not included in
the model as the speed choice is deterministic in the camera housing section. This observation is
consistent with the findings of previous studies that drivers would slow down when they notice or are
warned of cameras (De Pauw et al., 2014a; De Pauw et al., 2014b; Elvik, 1997; Marciano and Norman,
2015).
3
We also explored alternative distributional assumptions such as log-normal for the random coefficients,
but the model with normal distribution provided the best fit. Besides, other distributions did not offer
substantive interpretations that were very different from the model with normal distributions.

90
Table 5. 4 Parameter estimates of a panel MMNL model for the speed choice of professional drivers*
Explanatory variables
Standard section
Difference between warning and
standard sections
Speed
compliance
Speed range 1
Speed range 2
Speed range 1
Speed range 2
Constants
Mean
0 (Fixed)
-1.35 (-2.52)
-10.14 (-1.77)
-5.59 (-3.71)
-13.16 (-4.64)
SD
3.82
(10.73)
1.24 (2.46)
7.55 (6.5)
1.41 (1.67)
1.91 (2.18)
Stated Preference (SP) attributes
DOP
Mean
-0.17 (-1.96)
-0.17 (-1.96)
-0.48 (-1.80)
-0.48 (-1.80)
SD
0.15 (1.82)
0.15 (1.82)
1.19 (5.20)
1.19 (5.20)
DOP x drivers with recent speeding ticket
IS
IS
-0.17 (-2.17)
-0.17 (-2.17)
Fines (in HK$ 100)
Mean
Dropped
Dropped
-0.11 (-1.76)
-0.11 (-1.76)
SD
-
-
0.14 (2.13)
0.14 (2.13)
Fine (in HK$ 100) x drivers with trip-based salary
IS
IS
-0.13 (-2.43)
-0.13 (-2.43)
Fine (in HK$ 100) x drivers with recent speeding
ticket
IS
IS
-0.23 (2.05)
-0.23 (2.05)
Camera-to-
Housing ratio
(Base case:
status quo (20/120)
and (20/240)
Minor increase (40/120)
Mean
IS
-1.92 (-2.7)
IS
IS
SD
-
1.33 (2.8)
IS
IS
Major Increase (60/120)
Mean
IS
-2.03 (-3.6)
IS
IS
SD
-
IS
IS
IS
Distance of
warning sign from
the camera section
(Base case: 100m)
50 m
-
-
-2.09 (-6.44)
-3.91 (-1.72)
150 m
-
-
2.42 (6.64)
4 (1.96)
200 m
-
-
2.31 (6.5)
9.2 (4.6)
Drivers' operational and perception characteristics
91
Age
(Base case: Mid-
age 46-55 years)
Older drivers (> 55
years)
IS
IS
-0.70 (-2.13)
IS
Young drivers (<45
years)
IS
IS
IS
3.75 (2.1)
Education status
(Base case:
secondary and
tertiary education)
Up to primary level
1.81 (2.99)
IS
IS
IS
Marital status
(Base case:
unmarried)
Married
-0.45 (-2.56)
-2.59 (-2.68)
IS
IS
Monthly income
(in HK$)
(Base case: less
than 15K)
Between 15K and 20K
IS
IS
IS
IS
More than 20K
IS
IS
1.78 (2.49)
7.86 (1.94)
Salary system
(Base case: others)
Trip-based
1.37 (2.07)
10.32 (5.90)
IS
IS
Monthly
IS
IS
IS
IS
Daily driving
hours
More than 9 hours
IS
-2.41 (-1.91)
-1.16 (-1.98)
-11.36 (-2.4)
Less than 8 hours
IS
IS
0.57 (2.71)
2.45 (2.32)
Vehicle Type
(Base case: Bus)
Green minibus
5.19 (5.77)
IS
-2.71 (-2.6)
IS
Goods vehicle
7.30 (7.87)
5.02 (2.35)
-3.06 (-3.4)
-3.31 (-2.58)
Red minibus and Taxi
5.77 (4.41)
IS
-2.23 (-1.95)
IS
Dummy if the driver recently received
speeding ticket
7.16 (2.93)
10.74 (3.35)
IS
-5.02 (2.16)
Perception on
speeding as a cause
of injury
(Base case:
Neutral and high)
Low
IS
6.00 (2.84)
IS
IS

92
Perception on
effectiveness of
cameras
(Base case: Low
and neutral)
High
IS
IS
IS
-2.30 (-1.79)
Frequency of
sighting cameras
(Base case:
Medium (4-6/10)
and low (0-3/10)
High (>7 times per 10
trips)
IS
-3.61 (-3.25)
IS
-7.15 (-1.95)
Goodness of fit measures:
Number of cases
3208
Number of parameters
56
Log-likelihood of constants only model
-2911.09
Log-likelihood at convergence
-1279.21
Bayesian Information Criterion
3010.53
Base alternative: Speed compliance; IS: Statistically Insignificant at 90% confidence level.
93
5.5.1 Effects of penalty level and enforcement strategy
Among the SP attributes for penalty and enforcement, the DOP variable shows a
statistically significant deterrence on speeding in both standard and warning sections,
with higher deterrence in the warning section than in the standard section. Professional
drivers are indeed, generically speaking, sensitive to the increase in DOPs since incurring
DOPs may lead to disqualification of driving license, which is the source of their
livelihood (Wong et al., 2008). However, there is significant heterogeneity in the
influence of the DOP variable both due to observed and unobserved factors. Specifically,
drivers who were recently issued a ticket are more likely than their peers to be deterred
by DOPs when traveling in the warning section. Considerable unobserved heterogeneity
also exists in the influence of DOPs on drivers’ speeding choices in both standard and
warning sections. Interestingly, the standard deviation of the DOP coefficient in the
warning section is higher than in the standard section, implying that the deterrent effect
of an increased DOP penalty tends to be more diverse in the warning section despite its
greater deterrent effect on average. This finding could be attributed to the heterogeneity
in driver’s threat and coping appraisals of the warning messages (Kergoat et al., 2017),
as well as the effects of drivers’ characteristics on the comprehension of traffic signs (Ng
and Chan, 2008). For example, different drivers may perceive the self-efficacy of
avoiding the speeding penalty differently when forewarned about camera enforcement.
Thus, some drivers may actually initially increase their speeds as soon as they encounter
the warning section (to compensate for the fact that they have to reduce speeds at the
downstream camera section) because they feel confident in their ability (self-efficacy) to
estimate where the camera section will begin and in their ability to decelerate at the right
time to avoid speeding penalties in the camera section. Other drivers may immediately
reduce their speed upon encountering the warning section because they feel less confident
in their ability to take evasive speed reduction actions later downstream to avoid penalties
in the camera section. Such variations in self-efficacy are likely to get magnified as the
DOP penalty increases in the camera section, leading to the higher speed variance in the
warning section as the DOP penalty increases.
Unlike the deterrent effect of DOPs, the monetary fines variable turned out to have a
marginally positive coefficient in the standard section suggesting an increase in the
94
propensity for speeding with an increase in fines. While this may be a coping mechanism
to “make up” time in the standard section in anticipation of lost time due to adherence to
speed limits in the warning section, we noted that this effect had a strong interaction with
the length of the warning section. Thus, we chose to drop this variable and include the
length of the warning section as the primary determinant variable in our model (more on
this warning section length effect later). In the warning section itself, monetary fines are
associated with a negative coefficient for a majority of the sample (obtained from the
mean and standard deviation of the corresponding random coefficient), suggesting a
deterrent effect of monetary fine when it is combined with a warning of speed
enforcement ahead for a majority of the drivers. Furthermore, there is heterogeneity in
response to fines in the warning section based on driver characteristics. Specifically, in
warning sections, monetary fines have a larger deterrent effect (in the context of speeding)
for drivers who are paid on a per-trip basis and those with a recent speeding ticket relative
to other drivers. These results are again an illustration of the interplay between drivers’
threat and coping appraisal mechanisms, where drivers respond to the threat of a monetary
fine when they are made aware of the cameras that will increase the likelihood of them
being fined. And such interplay appears to vary across drivers based on both observed
and unobserved factors.
In the context of camera-based enforcement strategy, reducing the camera-to-housing
ratio from the status quo (i.e., from 20:120 to 20:240 camera-to-housing ratio) did not
show a statistically significant effect on the drivers’ stated speeding choices. However,
drivers were less likely to opt for severe speeding (range 2) in both the standard and
warning sections when the camera to housing ratio was increased from the status quo.
This is presumably because an increase in the number of camera installations would result
in an increased “threat” of being apprehended for speed limit violations. Interestingly, the
standard deviation associated with the coefficient of a minor increase in camera-to-
housing variable suggests that a small fraction (9%) of the drivers tend to choose speeding
with an increase in camera-to-housing. This result may be attributed to the risk-taking
behaviors of such individuals as well as heterogeneity in perceiving a threat of
apprehension due to a minor increase in the number of cameras. However, with a major
increase in the camera-to-housing ratio, this risk-taking behavior reduces, perhaps due to
a greater perception of the threat of apprehension.
95
The placement of the warning sign – that is, the distance of the warning sign from the
camera housing location – exhibits an influence on speeding in the warning section.
Specifically, reducing the distance between the warning sign and the housing unit leads
to lower speeding tendencies (for both speeding ranges). This is intuitive as individuals
may want to start slowing down (or at least not speed) to avoid sudden decelerations just
before arriving at the camera housing. In fact, the presence of a warning sign (upstream
of a fixed speed camera) has been found to be associated with reductions in mean driving
speed and proportion of more severe speeding (Retting et al., 2008; Høye, 2014). Kergoat
et al. (2017) postulated that the distance between warning sign and speed camera should
be increased to weaken the “Kangaroo effect”. However, the parameter estimates for
speeding range 2 suggest a heightened increase in the propensity to choose that speeding
range when the warning sign is installed 150m or 200m upstream of a camera housing.
That is, our results suggest that the deterrent effect of a warning sign could in fact be
diminished when the distance between the warning sign and the housing unit increases
excessively. That is, as drivers learn that the warning signs are placed farther away from
the housing, they speed up because they know they have a larger cushion to decelerate
and they also want to make up some time in anticipation of slowing down closer to the
actual camera housing location. Basically, as warning signs are placed farther away from
the camera housing, professional drivers start to view the early part of the warning section
as a “standard” section. This indicates a need for optimal placement of warning sign that
can tradeoff between the “Kangaroo effect” and effectiveness of the warning sign in
deterring speeding behavior.
5.5.2 Effects of demographic characteristics of professional drivers
Driver age does not have a strong association with speeding behavior in the standard
section. This could be because all professional drivers, regardless of age, tend to be more
aggressive when there is no speed enforcement and no warning (Öz et al., 2010a, Wong
et al., 2008). In contrast, in the warning section, older drivers are less likely to speed up
to range 1 and younger drivers are more likely to speed up to range 2. These results
suggest that the likelihood of speeding offences decreases with driver age, perhaps
because older drivers tend to be more cautious (Ram and Chand, 2016; Rosenbloom and
96
Shahar, 2007) but younger people are more likely to be sensation- and thrill-seeking
(Delhomme et al., 2012; Fernandes et al., 2010; Tseng, 2013). In the context of education
background, individuals with up to primary level education are more likely to speed up
to range 1 in both standard and warning sections. Previous studies also suggest that
professional drivers with higher education attainment are less likely to commit traffic
offences (Mallia et al., 2015; Mehdizadeh et al., 2018; Tronsmoen, 2010). Married drivers
(relative to those who are single) are less likely to speed in both the standard and warning
sections (see Mehdizadeh et al., 2018 and Wong et al., 2008 for similar findings), perhaps
because married individuals, due to their familial responsibilities, tend to be more
responsible in driving than single individuals.
Individuals with high monthly income (>20K), ceteris paribus, are more likely than
others to choose to violate speed limits in warning sections. This is perhaps because they
can afford to pay the fines. Also, recall from earlier discussion that the maximum fine of
HK$550 for speeding range 2 is a rather small percentage of HK$ 20K per month. In
contrast, the maximum monetary fine for speeding can reach 50% of average monthly
incomes of taxi drivers in the United States (United States Department of labor, 2018)
and 35% in the United Kingdom (Sentencing Council, 2017), respectively. In road safety
research, deterrence theory is widely used to investigate driver’s perception of the
sanctions (in terms of severity, certainty and celerity) for traffic offences (Kergoat et al.,
2017; Li et al., 2014; Tay, 2005a, 2005b, 2005c, 2009). It is based on the idea that people
avoid committing a crime due to the threat and fear of being legally punished, which also
involves an evaluation of the costs and benefits of the crime (Gibbs, 1985). In this sense,
the ratio of the cost (monetary fine) to the benefits (possible income) of speeding offence
is indeed quite low in Hong Kong.
5.5.3 Effects of operational characteristics of professional drivers
As discussed earlier, drivers who earn on a per-trip basis (i.e., trip-based salary) are more
likely to be deterred by monetary fines in the context of speeding in warning sections.
Regardless of the level of monetary fines, the coefficients of the trip-based salary dummy
variable suggest that such drivers are more likely than others to commit speeding offences
in both the standard and warning sections. Since their earnings depend on the number and
97
distance of the trips made, trip-based salaried drivers have a higher incentive to speed up
to arrive at the destination quickly. In Hong Kong, trip-based drivers (these are typically
drivers of taxis, light vans, red minibuses etc.) are generally self-employed and are not
well-regulated (Meng et al., 2017; Wong et al., 2008). In contrast, the monthly-salaried
drivers are typically regular employees of large transport operators and logistics firms
with good safety culture and driver management systems (Newnam et al., 2004; Öz et al.,
2010b, 2013) including GPS-based tracking of vehicle speeds. These factors also have a
bearing on the salary system-based differences in speeding choices.
Individuals who drive for more than nine hours per day have a lower inclination than
others to violate speed limits. This could be attributed to the possible driver fatigue caused
by a prolonged driving time. Drivers may adopt a compensation strategy by reducing their
speed to lower their risk of fatigue-related crashes (Williamson et al., 2002). In contrast,
individuals who drive for less than eight hours per day are associated with a greater
likelihood (than others) of violating speed limits in the warning section. This finding will
need further investigation to assess its robustness.
In the context of vehicle type, drivers of all types of vehicles other than buses have a
higher tendency of speeding up in both standard and warning sections, albeit they are
relatively less likely to speed up in warning sections than in standard sections. Indeed,
minibus drivers and taxi drivers in Hong Kong have been recognized as problematic and
risk-taking groups (Meng et al., 2017; Wong et al., 2008). On the other hand, goods
vehicle drivers are paid to drive for the transport of goods while bus drivers are to drive
for the transport of passengers. A greater sense of social responsibility on bus drivers
might make them less aggressive (at least in a stated preference setting) than the drivers
of other types of vehicles (Paleti et al., 2010).
5.5.4 Driver history and safety perceptions
Driving history and safety perceptions have a substantial influence on the participants’
stated speed choices. For instance, drivers who recently received a traffic ticket are
associated with a greater likelihood of speeding in both standard and warning sections
(albeit the tendency for speeding range 2 is lower in warning sections than that in standard
98
sections). Further, as discussed earlier in the context of interaction between this variable
with the SP attributes, increasing fines or DOP appears to reduce the speeding tendency
of these drivers in warning sections. However, even at the highest level of fine and DOP
values presented in the SP experiment, these drivers show a higher tendency (than others
without recent tickets) to violate speed limits. These results suggest that risk-taking
behavior and aggressive driving styles of these drivers overshadow any deterrent effect
from receiving a speeding ticket (Sagberg and Ingebrigtsen, 2018). It appears that simply
imposing fines or DOPs might not suffice to reduce the aggressive driving traits of such
drivers. This result suggests a need for additional investigations to assess the effectiveness
of combining DOPs and fines with driver training programs aimed to reduce risk-taking
and aggressive driving traits.
Individuals who perceive that speeding does not cause injuries have a higher tendency of
opting for speed range 2 in both standard and warning sections. This aligns with the
previous findings that drivers with lower risk perception tend to be associated with
aggressive driving behaviors (Cestac et al., 2011; Rosenbloom, 2003). In addition, drivers
who perceive that cameras are highly effective in catching offenders are associated with
a lower tendency of speeding in speed range 2 in the warning section, while their
disposition for speed range 1 is not statistically different from compliance. Individuals
who sight speed enforcement camera housings more frequently (in at least 7 out of 10
trips) have a lower tendency of speeding in range 2 (in both standard and warning
sections). This could be attributed to the perceived higher level of enforcement, which
may contribute to the decrease in driver’s speeding intention (Blincoe et al., 2006;
Hössinger and Berger, 2012) at least in the high-speed range.
5.5.5 Marginal effects due to changes in SP attributes
The model was applied to estimate marginal effects on market shares (of speed choice)
in response to changes in the SP attributes. As shown in Table 5.5, the marginal effects
were computed for both the standard and warning sections. According to these results, an
increase in the DOP by 1 point resulted in greater than 4% increase in compliance in both
the sections. In the context of monetary fines, a 10% increase resulted in only a 1.73%
increase in compliance. Such a low marginal effect is consistent with the discussion of
99
model estimation results that monetary fines alone might not significantly deter
professional drivers from speed violations. Note that the percentage reduction in the share
of drivers who would opt for speeding range 2 is high (13.02%). However, such a high
percentage reduction is an artifact of a rather small proportion of drivers choosing this
option in the base case.
Increasing camera-to-housing ratio from the status quo (20:120) to 40:120 shows a
considerable (at least 29%) decrease in the share of drivers choosing speed range 2.
However, the decrease is not substantial when the ratio is increased to 60:120. This
suggests that the marginal benefit from increasing the camera-to-housing ratio beyond
40:120 might not be substantial. Furthermore, since the proportion of drivers choosing
speed range 2 is itself very small (1%), even a 32% decrease in this share due to increasing
the ratio to 60:120 does not appear to hold practical effectiveness.
In the context of the placement of warning sign, increase in the distance between the
warning sign from 100m is associated with a substantial increase in the proportion of
drivers choosing to speed in the warning section. Even if we neglect these increases for
speed range 2 (due to a rather small base market share for this alternative), the increases
in the proportion of people choosing speed range 1 is substantial when the distance is
increased. These results suggest the need for an optimal placement of warning sign that
can trade-off between the “Kangaroo effect” and effectiveness of the warning sign in
deterring speeding behavior.
100
Table 5. 5 Marginal effects due to changes in the SP attributes
Variables
Percentage change in market shares
Standard section
Warning section
Speed
Compliance
Speed
range 1
Speed
range 2
Speed
Compliance
Speed
range 1
Speed
range 2
DOP
Market share in base case
16.96%
78.64%
4.40%
66.27%
32.88%
0.85%
Change in market share upon
increment by 1 point
4.22%
-0.64%
-4.85%
4.63%
-9.01%
-12.74%
Fines
Market share in base case
16.96%
78.64%
4.40%
66.27%
32.88%
0.85%
Change in market share upon
increment by 10 percent
0.00%
0.00%
0.00%
1.73%
-3.16%
-13.02%
Camera-to-Housing ratio
(Base case: 20/120)
Market share in base case
16.89%
77.78%
5.34%
66.20%
32.80%
1.00%
Change in market share upon change
from base case to minor increase
(40/120)
0.83%
2.11%
-33.39%
0.20%
0.50%
-29.52%
Change in market share upon change
from base case to major increase
(60/120)
0.96%
2.40%
-38.06%
0.22%
0.55%
-32.80%
Distance of warning sign from
camera housing unit
(base case: 100m)
Market share in base case
18.01%
80.91%
1.08%
73.50%
26.41%
0.09%
Change in market share upon change
from base case to 50m
0.00%
0.00%
0.00%
14.18%
-34.37%
-50.09%
Change in market share upon change
from base case to 150m
0.00%
0.00%
0.00%
-23.02%
63.56%
143.85%
Change in market share upon change
from base case to 200m
0.00%
0.00%
0.00%
-22.81%
59.00%
1277.90%
101
5.6 Concluding remarks
This study applied a stated preference survey and a panel mixed logit model to evaluate
the deterrent effects of penalty and enforcement strategies – DOP penalty, monetary fines,
and speed enforcement cameras along with a warning of such enforcement – on the
propensity and severity of speeding among professional drivers. In doing so, the study
controlled for the effects of driver demographics and operational characteristics as well
as driver history and safety perceptions. As importantly, observed and unobserved
heterogeneity were incorporated in drivers’ responses to penalty and enforcement
strategies. A panel mixed logit model is estimated and applied to understand the
effectiveness of penalties and enforcement strategies on driver’s speeding behaviors.
The results indicate that an increase in DOP penalty is more effective as a deterrent against
speeding than increasing monetary fines. This could be attributed to the higher sensitivity
of professional drivers to the increase in DOPs since incurring more DOPs may lead to
disqualification of the driving licence. Monetary fines were not found to be very effective,
perhaps because the monetary fine levels were very low relative to the income levels of
the drivers. It remains to be explored if increasing the quantity of fines combined with
appropriate warning messages (such as “Check speed––fines up to $1000”) can help
increase the effectiveness of monetary fines. Significant heterogeneity was found in the
influence of the DOP variable both due to observed and unobserved factors. Specifically,
while increasing DOP deters all drivers from speeding, doing so when combined with a
warning (i.e., in the warning sections) appears to more strongly deter those who recently
received a speeding ticket than others. However, the unobserved variation in the warning
section is greater than that in the standard section, perhaps because of differences in
drivers’ threat and coping appraisals of the warning messages, as discussed in section
5.4.1.
In the context of camera-based enforcement strategy, increasing the ratio from status quo
(20:120) to 40:120 showed a considerable effect (29%) on reducing the percentage of
drivers opting for severe speeding, albeit it should be noted that the base percentage of
drivers in this category is only 1%. Increasing it further to 60:120 did not show a
102
substantial effect in the policy simulations we conducted. Further, reducing the ratio from
the status quo (20:120) to 20:240 did not show a significant effect on the drivers’ stated
speeding choices.
The placement of the warning sign – that is, the distance of the warning sign from the
camera housing location – exhibits an influence on speeding behaviors in the warning
section. Placing it close to the camera housing location decreases the likelihood of
speeding but can potentially increase the “kangaroo” effect. And placing it too far from
the camera location would substantially increase the percentage of speeding behaviors.
These findings suggest a need for the optimal location of warning signs. Alternatively,
information on the penalty level can be added to the warning signs to increase the threat
appraisal of the driver for reducing speeding behaviors in warning sections.
The demographic characteristics of drivers such as age, education, income have an
influence on how drivers respond to strategies aimed at increasing speed compliance.
Similarly, the drivers’ operational characteristics, driving history and perceptions have a
substantial bearing on the efficacy of speed compliance strategies. Therefore, targeted
driver educational and training campaigns might help increase the speed compliance rates
in the population. For example, drivers with a recent history of traffic tickets continue to
demonstrate a greater tendency for speeding even for high levels of DOP and monetary
fines. It appears that simply imposing fines or DOPs might not suffice to reduce the
aggressive driving traits of such drivers. A combination of DOPs and fines with driver
training programs aimed at addressing risk-taking and aggressive driving traits may be
needed to increase safe driving tendencies among these drivers. Further, higher penalties
may be considered for repeat offenders to enhance the deterrent effect of the penalties
(Watson et al., 2015). Similar penalty strategies have been applied for repeat offenders of
drink driving in Hong Kong (Li et al., 2014).
Speeding and other traffic offences may be attributed to drivers’ goals of travel time
saving and revenue maximization (Cestac et al., 2011; Peer, 2010; Tarko, 2009), while
safe driving performance and social responsibility may be lower in the hierarchy of
professional drivers’ goals (Hatakka et al., 2002). Therefore, inclusion of positive motives
and goals in the education/training and licensing of professional drivers may be beneficial.
103
In addition, technology-based interventions, such as GPS-based automated speed
surveillance and related automated speed enforcement mechanisms, may aid in reducing
speeding behaviors.
The results from this study help enhance the current understanding and effectiveness of
penalties and speed-enforcement strategies (i.e. penalties, warning signs, camera
housings, etc.). Yet, this study is limited to the assessment of a few demographics and
operational characteristics of professional drivers. It would be worth exploring the
possible effects of latent characteristics on speeding propensity and severity, when more
comprehensive information on the physiological and psychological metrics of the
participants is available. Moreover, results of this questionnaire survey are derived from
a scenario of a typical city road with a speed limit of 50km/h. It would be interesting to
explore the effect of other road environments, such as an expressway with a speed limit
of 70 km/h or higher, on the speeding behavior of professional drivers. Further, it would
be helpful to undertake a study that evaluates the effectiveness of combining speeding
penalties with driver education/training campaigns in reducing risk-taking and aggressive
driving. Also, the separation between the placement of a warning sign and the camera
housing unit was expressed as a distance in the current study. Perhaps a time separation
rather than a space separation would be a better approach to capture how individuals
respond to warning signs before entering monitored roadway section. Yet another line of
research would be to investigate whether fixed ASEC systems, when complemented with
a small human police force, would have a higher impact in reducing speeding than a fixed
ASEC system alone. And, if so, what may be the optimal combination of investment in
human-based and machine-based enforcement mechanisms. Perhaps most importantly,
all the results and recommendations in this study are based on self-reported speed
indications within stated experiments, which clearly can influence the reliability and
accuracy of the relationships estimated. A study based on an actual field experimental
design and field observations of speed at different sections would be more credible.
104
Chapter 6 Effects of commercial vehicle mix and multivariate
analysis of crash rates by vehicle type
6.1 Introduction
In Hong Kong, commercial vehicles (buses, taxis, light-goods vehicles, and medium- and
heavy-goods vehicles) constitute only 20% of total vehicle fleet but are involved in over
70% of road crashes. A plausible reason for such disproportionate crash share of
commercial vehicles could be their relatively higher travel amounts (per-vehicle distance)
(Pei et al., 2012; Transport Department, 2019). For example, recently-published statistics
indicate that the annual per-vehicle distances travelled (million km) by commercial
vehicles (licensed taxi (0.14), bus (0.06), light goods vehicle (0.03), medium and heavy
goods vehicle (0.03)) are all significantly higher compared to the private car (0.01)
(Transport Department, 2019). In addition, it has been determined that traffic violation
rates and crash involvement are higher for commercial vehicle drivers compared to
private car drivers (Chen et al., 2020a; Öz et al., 2010; Tang et al., 2018; Wong et al.,
2008).
In this chapter, the commercial vehicle proportion (CVP) refers to the ratio of commercial
vehicles to all vehicles in the traffic stream. Interactions between road safety factors,
including road user behaviour, weather, and road geometric factors, have been examined
in previous studies. However, this has rarely been done for the CVPs and roadway
features. While consideration of the interactions between these two specific factors may
be a contribution that seems to be only incremental, it is important to address this gap in
the literature because both roadway features and commercial vehicle proportion have
been found to be significant factors of urban road crash propensity. Therefore, in this
study, we hypothesize that these two factors have some interaction effects on road safety.
If this is affirmed, then one of the two factors (the prevailing roadway features) potentially
mediates the safety effect of the second factor (CVP). In that case, the urban road design
and operations policies related to commercial vehicle operations that fail to consider such
mediating effects, could lead to increased urban crashes involving commercial vehicles
105
(Bao et al., 2019). This is a critical issue, given the realization that in several urban areas
including the city used in the methodology demonstration (Hong Kong), commercial
vehicles account for a significant fraction of all trips.
Against the background presented in the previous section, the goal of this paper is to
measure the association between the commercial vehicle proportion and crash rate; more
importantly, to examine the mediating (moderating or magnifying) effects of roadway
attributes on this association; and ascertain how this association and the moderating
effects vary by the commercial vehicle type, considering the crash severity level and road
attribute type. It is anticipated that the results will help guide policy development by the
road authorities and transport operators regarding the management and regulation of
commercial vehicles and their drivers.
The scope of this study is such that it addresses commercial vehicles at urban areas. The
reason for this is the higher travel amounts (per-vehicle mileages) and crash propensities
of this vehicle class compared to other vehicle classes in urban areas, as evidenced in past
research. The role of commercial vehicle operations in urban road safety has come under
increasing scrutiny in recent years, and the resolution of the problem of high crash rates
for commercial vehicles at such areas, continues to be an important roadway safety issue
and public relations concern for urban road agencies. Therefore, city road authorities and
transport operators seek to regularly review crash propensities and to revise safety
countermeasures, including operations policies and physical roadway interventions, to
enhance commercial vehicle safety. The commercial vehicle classes are: (i) public buses,
including single- and double-decker buses, and light buses, (ii) taxi, (iii) light van or light-
goods vehicle (5.5 tonnes maximum gross vehicle weight, and (iv) medium- and heavy-
goods vehicles (24 and 38 tonnes, respectively). This study analyses the safety effects of
the interaction between commercial vehicle percentage and roadway attributes.
This chapter is organized as follows. Section 6.2 describes the method of analysis. Section
6.3 presents the method of data collection. The analysis results and interpretations for the
overall crash rates at different severity levels are given in Section 6.4. Section 6.5
provides the results and discussion on the multivariate analysis of crash rates by vehicle
type. Finally, findings and recommendations are summarized in Section 6.6.

106
6.2 Data collection
6.2.1 Overall crash rates by injury severity
This study used comprehensive crash and traffic data from eighty-eight (88) road
segments in the study area (the City of Hong Kong) spanning a four-year period (2014–
2017) (Figure 6.1). The road segments under investigation are widely distributed
spatially over the study area. The traffic count data were collected from the Annual Traffic
Census (ATC) database which was established by the road agency primarily for transport
planning purposes. The ATC database provided road geometry data (e.g., the number of
lanes, lane width, and road type), and the traffic data. This included the annual average
daily traffic by vehicle type, hourly variation, and weekday/weekend distribution), and
the proportions of vehicle classes including public bus, taxi, light-, medium-, and heavy-
goods vehicles. The source of the crash data is the Hong Kong Transport Department’s
Transport Information System (TIS) which includes accident data (e.g., injury severity,
date and time, and location), vehicle attribute data (e.g., vehicle type and year of
manufacture), and casualty characteristics (e.g., injury severity, casualty role, age, and
gender). The crash severity levels are: killed (fatal), severe injury, and slight injury. Due
to the paucity of fatal and severe injuries, these two levels were combined to form a single
level: killed and severe injury (KSI).
The Hong Kong Road Network Dataset provided data on the length, number of
intersections, presence of on-street parking, and speed limits of the road segments. The
data on hourly variations and percentage distribution across the commercial vehicle
classes, were available for a 16-hour period (7AM to 11PM) during weekdays; therefore,
crashes that occurred within 11PM-7AM and on weekends are not included in the data.
The traffic and crash data were aggregated into eight 2-hour periods: 7AM–9AM, 9AM–
11AM, 11AM–1PM, 1PM–3PM, 3PM–5PM, 5PM–7PM, 7PM–9PM, and 9PM–11PM.
The traffic, crash and road network characteristics data were mapped to the corresponding
road segments using a geographical information system (GIS) platform.
In the study, the overall weekday crash rate (crash count per million vehicle-kilometers
travelled) of crash severity level k at road segment i in period p of year t, is specified as:
(1)

107
Where: i = 1,2,…88; k = 1,2; p = 1,2,…,8; t = 2014, 2015, 2016, 2017;
is the number of weekday crashes at severity level k at road segment i in period p of year
t;
is the two-hour traffic flow of road segment i in period p of year t
(calculated by hourly variation of the weekday AADT on road segment i in year t);
is the length of road segment i.
The crash data are aggregated into eight 2-hour periods to mitigate the problem of
excessive zero (crash) observations. Of the 2,816 observations, 1,018 observations had
zero slight-injury crashes and the remaining 1,798 had at least one slight-injury crash;
2,322 observations had no KSI crashes and the remaining 494 had at least one KSI crash.
Figure 6.2 presents the temporal distribution of the various vehicle classes at the road
segments under study, and Table 6.1 defines and presents the descriptive statistics of the
variables considered in this study.
(a) Average annual KSI and slight-injury crash counts of the selected road segments, 2014-2017

108
(b) Average annual KSI and slight-injury crash rates of the selected road segments, 2014-2017
Figure 6. 1 Study area (Hong Kong) showing the road segments studied and safety
trends
Figure 6. 2 Variation of commercial vehicle percentage by time of day
109
Table 6. 1 Descriptive statistics of the variables
Variable
Mean
S.D.
Min.
Max.
KSI crash rate
0.17
1.12
0.00
30.72
Slight-injury crash rate
1.16
4.14
0.00
151.43
Length (km)
3.00
3.48
0.18
19.08
Logarithm of 2-hour traffic flow
8.11
1.01
4.42
9.94
Average lane width (m)
3.59
0.45
2.70
5.25
Wide roadway
(more than four traffic lanes: yes = 1, no = 0)
0.48
0.50
0
1
High intersection density
( 3 intersections per km, yes = 1, no = 0)
0.21
0.41
0
1
Speed limit (km/h)
64.79
13.07
30
100
Presence of on-street parking
(yes = 1, no = 0)
0.06
0.23
0
1
Proportion of taxi (%)
22.20
11.18
0.00
69.75
Proportion of public buses (%)
8.08
7.34
0.00
60.15
Proportion of light-goods vehicles (%)
14.69
8.09
0.20
40.70
Proportion of medium and heavy (M&H) goods vehicles (%)
5.80
8.07
0.00
57.95
Figure 6.3 attempts to better demonstrate possible relationship between commercial
vehicle mix and crash rates by injury severity. The z-axis of Figure 6.3 is the normalized
crash rates using the equation (2) below (see Ulak et al., 2018), in order to get the same
scale for KSI and slight injury crash rates. However, it should be noted that the crash rates
used in statistical modeling are
from equation (1).
(2)
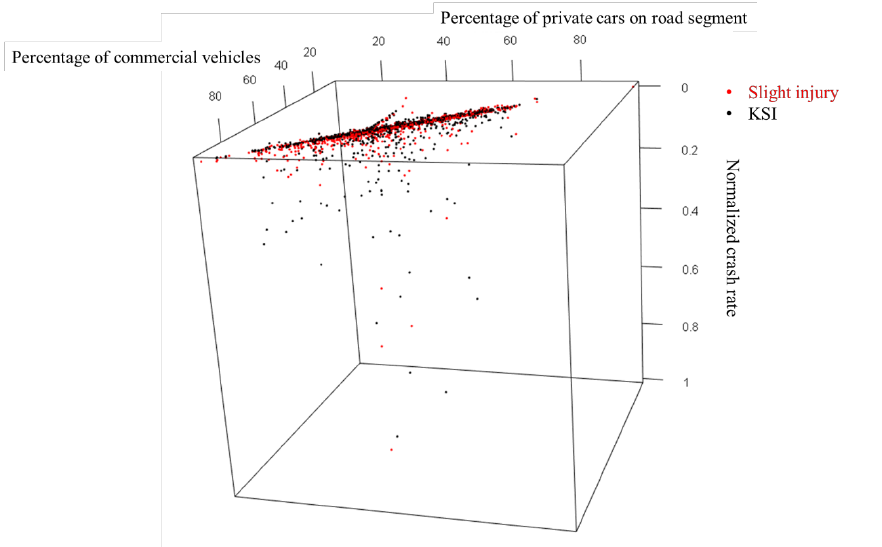
110
Figure 6. 3 Normalized overall crash rates by injury severity under different commercial
vehicle mix
6.2.2 Crash rates by vehicle type
In this study, comprehensive crash and traffic data of 100 road segments in Hong Kong
in the 3-year period from 2015 to 2017 are used. For instances, crash data are obtained
from the Transport Information System (TIS) of Hong Kong Transport Department
during the period from 2015 to 2017. TIS database consists of three profiles: accident
profile (e.g. injury severity, date and time, location, speed limit, road type, etc.); vehicle
attributes (e.g. vehicle type, year of manufacture, driver age, etc.), and casualty
characteristics (e.g. injury severity, casualty role, age, gender, etc.). Crashes are stratified
into three categories in accordance to injury severity: killed, severely injured and slightly
injured. Since the numbers of killed crash and severely injured crash are too small for
efficient analysis, they are combined into ‘killed and severely injured’ crash (known as
‘KSI’).
On the other hand, traffic count (e.g. annual average daily traffic by vehicle type and
hourly variation) and road geometry data (e.g. number of lanes, lane width, road type,
etc.) are obtained from the Annual Traffic Census (ATC) database. Vehicle classes
111
considered are private car, bus, light bus, taxi, light goods vehicle, and medium and heavy
goods vehicles. Furthermore, information on road segment length and number of
intersections are obtained from the Hong Kong Road Network Dataset. Since the
information on hourly variation and percentages of different vehicle classes is available
only for 16-hour period from 7 am to 11 pm. Crashes occurred in the period from 11 pm
to 7 am are not considered in the subsequent analysis. Also, the sample would be too
small if the crashes are disaggregated at hourly level. Then, the traffic and crash data are
aggregated to four-hour period as: 7 am – 11 am (morning), 11 am – 3 pm (noon), 3 pm
– 7 pm (afternoon) and 7 pm – 11 pm (evening). The abovementioned traffic, crash and
road network characteristics data are mapped to the corresponding road segments using
the geographical information system (GIS) technique.
Furthermore, crashes are classified into three categories by vehicle type -private car, light
commercial vehicle, and heavy commercial vehicle. In Hong Kong, road traffic
regulations (see chapter 374A, construction and maintenance of vehicles) has specified
the maximum gross vehicle weights of private car (3.0 tonnes), taxi (3.0 tonnes), light bus
(5.5 tonnes), light goods vehicle (5.5 tonnes), bus (24 tonnes), medium goods vehicle (24
tonnes), and heavy goods vehicle (38 tonnes). In this study, light commercial vehicles
include taxis, light goods vehicles, and light buses, while heavy commercial vehicles
include medium and heavy goods vehicles, and buses. A total of 2323, 2655, and 1024
crashes were identified to involve private cars, light commercial vehicle crashes, and
heavy commercial vehicle crashes, respectively. Among these 6002 crashes, 1233 only
involved private cars, 2114 only involved light commercial vehicle, and 458 only
involved heavy commercial vehicle. The remaining crashes could be multiple-vehicle
crashes involving different vehicle types. It is likely that private car often collides with
other vehicle types, so does the heavy commercial vehicle. It should be noted that the
multiple-vehicle crashes involving a motorcycle (that is, a private car/light commercial
vehicle/heavy commercial vehicle collides with a motorcycle) were not excluded in this
study. Figure 6.4 presents the histograms of crashes involving private cars, light
commercial vehicles, and heavy commercial vehicles across observations.
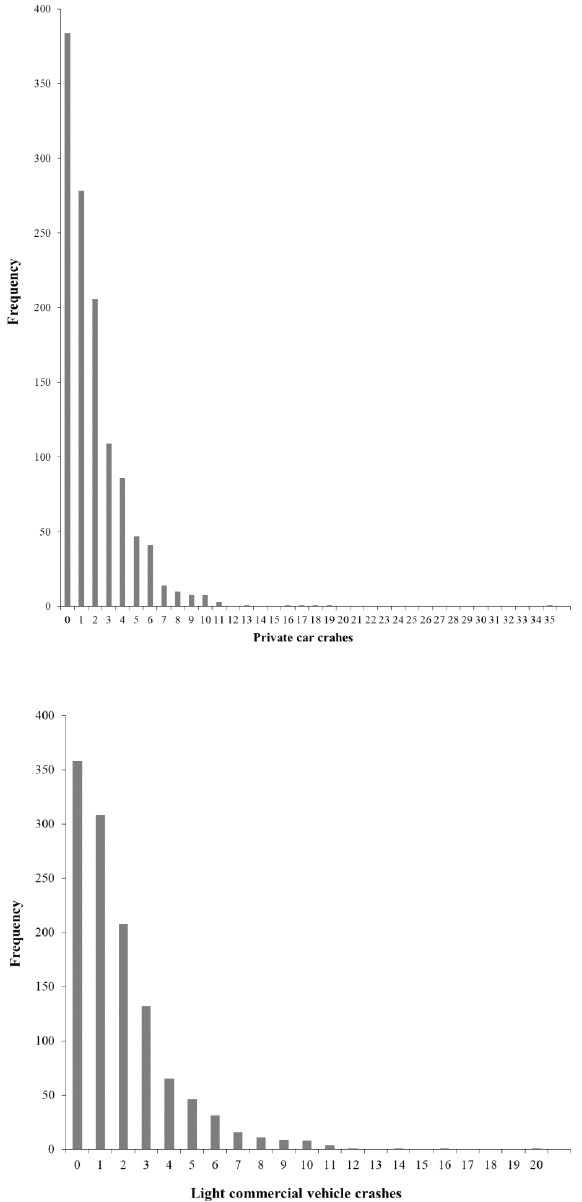
112

113
Figure 6. 4 Histograms of private car, light commercial vehicle, and heavy commercial
vehicle crashes
In this study, crash rate (per million vehicle-kilometre travelled) of vehicle type v at road
segment i in period p of year t is specified as,
(3)
i = 1,2,…100; v = 1,2,3; t = 1, 2, 3; p = 1,2,3,4
Table 6.2 summarizes the statistics of considered variables. Prior to parameter estimation,
multicollinearity test is conducted to assess the correlation between independent variables.
Results indicate that VIF (variance inflation factor) of independent variables are all less
than 3, hence, there is no multicollinearity between independent variables.

114
Table 6. 2 Descriptive statistics of the variables
Variable
Mean
SD
Min.
Max.
Private car crash count
1.94
2.48
0
35
Light vehicle crash count
1.89
2.21
0
20
Heavy vehicle crash count
0.85
1.28
0
12
Private car crash rate
1.69
11.58
0
274.85
Light vehicle crash rate
1.62
7.47
0
195.28
Heavy vehicle crash rate
0.75
7.75
0
262.86
Length (km)
2.71
3.35
0.08
19.08
Average lane width (m)
3.75
0.89
2.70
10.00
Number of lanes
4.58
2.35
1
12
Intersection density (number per km)
2.08
3.24
0.00
14.36
Speed limit (km/h)
64
13
30
100
Logarithm of four-hour traffic flow
1.74
1.11
-3.30
3.66
Presence of on-street parking (yes = 1,
no = 0)
0.12
0.33
0
1
6.3 Model specification and goodness-of-fit
In this section, the formulations of univariate random parameter Tobit model for overall
crash rates by injury severity (KSI and slight injury), and multivariate Tobit model for
crash rates by vehicle types (private car, light commercial vehicle and heavy commercial
vehicle) are specified under the Bayesian framework.
6.3.1 Random parameter Tobit model
In conventional safety literature, crash frequencies are typically modeled using count-
data approaches. In this paper, however, we examine the crash experience using an
alternative outcome – the crash rate, that is, the number of crashes per million vehicle-
kilometer travelled (Anastasopoulos et al., 2008). The advantages of crash-rate analysis
have been discussed by several recent studies (Zeng et al., 2017b, 2019; Guo et al., 2019).
For example, crash rate represents a standardized measure of the relative safety
performance of road entities as it neutralizes the crash exposure. Crash rates have always
been a common feature of government agency safety reports, and cash rate analysis
currently has several common applications including the identification of hotspots. The
crash rate variable is continuous in nature and left-censored at zero, as some road
segments in the study dataset have zero crashes; therefore, as recommended by previous

115
studies (Anastasopoulos et al., 2008; Guo et al., 2019; Zeng et al., 2017a, 2017b, 2018),
this study uses a Tobit regression approach.
The dependent variable is the crash rate, and the analysis is carried out for each level of
crash severity. The crash rate is a non-negative and continuous variable that is censored
at zero (meaning that there could exist road segments where no crash is observed during
a specific period). As such, in the analysis, we used a Tobit model (an econometric
technique originally proposed by Tobin (1958)) to resolve the problem of left- or right-
censoring of the dependent variable. Anastasopoulos et al. (2008) first applied the Tobit
approach in road safety research. It is often recommended to develop crash prediction
models separately for each level of crash severity because underreporting is often more
prevalent for less severe crashes (Anastasopoulos et al., 2012b; Pei et al., 2016).
Additionally, separate development of models by crash severity level helps eliminate
estimation bias that may arise from any shared but unobserved heterogeneity across
observations. To address this issue, previous researchers including Guo et al. (2019),
Chen et al. (2017a), Zeng et al. (2018, 2017a, 2017b), Anastasopoulos et al. (2012a,
2012b), and Anastasopoulos (2016) have used advanced modelling approaches including
random parameter Tobit model, multivariate Tobit model and multivariate random-
parameter Tobit model.
In this study, a random-parameter Tobit model
4
was developed to account for unobserved
shared effect among crashes and any heterogeneity in the effects of certain crash factors
across the observations. This was done for different levels of crash severity. The analysis
helped examine the associations between the crash rate and the commercial vehicle mix
(i.e., the respective proportions of the five commercial vehicle classes), and other
prospective explanatory factors including year, time of the day, road geometry, traffic
control, traffic flow were examined. The model proposed for the analysis has the form
(Equation (2) and Equation (3)):
4
To account for the possible unobserved shared effect among crashes at different crash severity levels,
multivariate Tobit model was also considered. However, results of goodness-of-fit assessment suggest that
multivariate Tobit model did not outperform the univariate one. Besides, our preliminary results suggest
that there is no evidence for significant correlation between KSI and slight crash rates.

116
(2)
(3)
Where: i = 1, 2, …, N; p = 1, 2, …, P; k = 1, 2, …, K;
denotes the latent variable
linking the expected crash rate of severity level k at segment i during period p;
denotes the observed crash rate; N, P and K refer to the total number of road segments,
time periods and crash severity levels, respectively;
denotes the value of j
th
explanatory variable at segment i during period p;
refers to a normally and
independently distributed random error term with zero mean and variance
;
is a
constant;
is the normal distributed random parameter
5
with a mean vector of
(that is, the coefficient of the j
th
explanatory variable
corresponding to crash severity
level k).
refers to a normally and independently distributed random error term with
zero mean and variance
. It should be noted that
is set to be random only when
its variance is statistically significant at 5% level, otherwise the parameter is set to be
fixed.
With regard to the non-zero crash case, the marginal effect (i.e., effect of per unit increase
in an independent variable on the expected crash rate) can be determined using
methodologies established in the literature (Anastasopoulos et al., 2008, 2016; Roncek,
1992):
2
2
[ ] ( ) ( )
1
( ) ( )
j
j
E Y f z f z
z
x F z F z
= − −
For the zero-crash case, the marginal effect can be specified as,
5
Alternative distributional assumptions such as log-normal for the random parameters were also explored.
Nevertheless, the model with normal distribution provided the best fit. For the considerations about the
random-parameter density functions, detailed discussions can refer to Anastasopoulos and Mannering
(2009). Moreover, the model with normal distribution can provide substantive interpretations that were
very different from models with other distributions.

117
( ) ( )
j
j
F z f z
x
=
Where:
denotes the change in the expected crash rate for non-zero crash
case;
denotes the change in the cumulative probability of having a crash for
the cases with no crashes; β
j
denotes the coefficient of the j
th
explanatory variable; F(z) is
the area bounded by the normal curve (i.e., the normal distribution function) for the
propensity of the crash occurrence; z denotes the normalized score; f(z) denotes the
standard normal density function; is the standard deviation of the error term
.
6.3.2 Multivariate Tobit model
To capture common unobserved factors across different crash types, multivariate analysis
is commonly adopted in previous research for a better modelling performance. For
examples, Lee et al., (2015) presented a significant unobserved shared effect between the
numbers of motor vehicle, bicycle, and pedestrian crashes, using multivariate Poisson
log-normal model. Zeng et al. (2017b) and Anastasopoulos et al. (2012b) accommodated
the significant correlation between crash rates at different severity levels, using
multivariate Tobit model. Guo et al. (2019) investigated the rear-end, sideswipe, and
angle crashes at freeway diverge areas and revealed the presence of unobserved risk
factors that jointly affect different crash rates by collision type. As the dependent
variables of the proposed analysis are crash rates by different vehicle type (private car,
light commercial vehicle, and heavy commercial vehicle), a multivariate Tobit model is
specified as follows:
(6)
i = 1,2,…,N; p = 1,2,…,P; v = 1,2,3
where
denotes the latent variable linking the expected crash rate of vehicle type v
118
(1,2,3 represents for private car, light commercial vehicle, and heavy commercial vehicle
crashes per million vehicle-kilometer traveled in road segment i, respectively) at segment
i during period p, while
denotes the observed crash rate.
is the constant,
is the estimated parameter for j
th
explanatory variable
corresponding to vehicle type v.
refers to a multivariate normally and independently distributed random error term
with zero mean, variance , and correlation , which can be expressed as
~ N (0, ).
The covariance matrix is,
=
=
(7)
where
,
,
represents the variance of error term
,
,
, respectively.
6.3.3 Goodness-of-fit
To assess the goodness-of-fit of the proposed model using Bayesian approach, deviance
information criteria (DIC) and Bayesian R
2
are commonly used (Huang et al., 2016; Zeng
and Huang, 2014; Zeng et al., 2017a, 2017b, 2018; Wen et al., 2018). DIC is essentially
a generalization of Akaike's Information Criterion (AIC) and is given by (Spiegelhalter
et al., 2002),
DIC =
+ pD
(8)
denotes the posterior mean of deviance, pD is the complexity term for the effective
number of parameters in the model. Model with the lowest DIC value, among the
candidate models, is considered to have the best prediction performance. Yet, difference
in DICs between models should also be considered. Specifically, difference should be
preferably greater than ten (Spiegelhalter et al., 2005).
For the multivariate analysis of crash rates by vehicle type, another goodness-of-fit
measure – Bayesian R
2
is also considered (Ahmed et al., 2011). Bayesian R
2
refers to the
ratio of explained sum of squares to total sum of squares. Bayesian
for model of crash

119
severity k is specified as:
, k = 1, 2
(9)
(10)
(11)
where
denotes the estimated crash rate of severity level k at segment i during period
p, and
represents the mean observed crash rate of severity level k.
In addition, for the multivariate Tobit model,
and
represent the Bayesian R
2
values of crash rates by vehicle type v and all observations. They are specified as:
, v = 1, 2, 3
(12)
(13)
(14)
(15)
(16)
120
where
denotes the estimated crash rate of vehicle type v at segment i during period
p,
and
represent the mean observed crash rate of vehicle type v and all
observations, respectively.
In this study, WinBUGS software was used to specify the formulations of the random-
parameter Tobit models under the Bayesian framework. Markov chain Monte Carlo
(MCMC) simulations were used to sample the posterior distribution of the model
parameters. Prior distributions of
were specified as being diffusely and normally
distributed N(0, 10
4
) (Guo et al., 2019; Lee et al., 2015; Zeng et al., 2017b, 2019).
For each model, a chain of 200,000 iterations of Markov chain Monte Carlo (MCMC)
simulation were established. In particular, the first 5,000 iterations served as burn-ins and
therefore were discarded. MCMC convergence was assessed by visually inspecting the
time-series plots of the estimated parameters, and the ratios of MC error to the
corresponding standard deviation of the estimates –specifically, the ratios should be less
than 0.05 (Ahmed et al., 2011; Guo et al., 2019; Wen et al., 2018; Zeng et al., 2017a,
2017b).
6.4 Results and discussion on the effects of commercial vehicle mix
Prior to parameter estimation, a multicollinearity test was conducted to assess the
correlations between the independent variables. The results indicated that the VIFs
(variance inflation factor) of the pairs of independent variables are all less than 5, hence,
there is no multicollinearity between the independent variables. The random parameter
Tobit models were used to identify the crash factors associated with crash rates by severity
level. Two broad categories of analysis were carried out: 1) basic models to reaffirm the
main effects of commercial vehicle proportions (CVP) on crashes, and 2) refined models
to closely examine the mediating effect of road environment crash factors on the CVP-
crash rate relationship. In the basic models, variables that were found not statistically
significant at the 5% level were eliminated using a backward stepwise regression
technique (Abdel-Aty et al., 2004; Bose et al., 2013; Huo et al., 2020). However, variables

121
including speed limit, public buses%, taxi%, and segment with wide roadways were
retained in the model. This is to allow for the possible confounding effects on the crash
rates. Then, refined models were developed to consider any interactions between the
significant variables representing the CVP and the other crash factors related to the
roadway environment, particularly, road geometry and traffic control facilities. In the
refined models, only the variables significant at the 5% level were included. Table 6.3
presents the goodness-of-fit results for the models developed. The refined models were
generally superior to the basic models in terms of DIC value, and the interactions between
the variables were manifest to a greater degree.
Table 6. 3 Results of the goodness-of-fit tests
Slight-injury crash rate
KSI crash rate
Basic model
Refined model
Basic model
Refined model
–4,185
–3,925
–9,254
–9,417
pD
6,353
6,071
3,865
3,784
DIC
2,167
2,145
–5,389
–5,633
DIC
basic
-DIC
refined
22
244
Note: Model with lower DIC (difference in DICs exceeding 10) has superior prediction
performance.
Tables 6.4 and 6.5 present the estimation results of random-parameter Tobit models for
slight-injury crash rate and KSI crash rate, respectively. The basic model (Table 6.4)
confirmed that the factors representing traffic flow, road geometry, traffic control,
commercial vehicle proportion, and time of day all influenced the slight-injury crash rate.
In particular, the [log of 2-hour] traffic flow (coefficient = –1.009) and the proportion of
medium and heavy goods vehicle (–0.026) were associated with lower slight-injury crash
rate. On the contrary, a wide roadway or 5 or more traffic lanes (0.926), high intersection
density (1.120), presence of on-street parking (1.818), proportions of taxi (0.029) and
light goods vehicle (0.061), and the time of day from 5PM to 9PM (0.630), were found
positively associated with slight-injury crash rate, at 5% significance level. Also, the
heterogenous effect of the average lane width (mean of 0.479 and standard deviation of
1.151) on slight-injury crash rate was found to be statistically significant. With regard to
the basic model in Table 6.4, also, log of 2-hour traffic flow (–0.092) and the proportion
of medium- and heavy-goods vehicle (–0.006) were associated with lower KSI crash rate.
In contrast, presence of on-street parking (0.392), proportions of public buses (0.009) and
light-goods vehicle (0.005) were found to be positively associated with the KSI crash rate.
122
Also, it was shown that the effects of average lane width (mean of 0.124 and standard
deviation of 0.035) and high intersection density (mean of 0.168 and standard deviation
of 2.920) on KSI crash rate varied across the observations.
The refined models for slight-injury and KSI crash rates (Table 6.5) present the interaction
effects of the commercial vehicle proportion which were found to be statistically
significant in the basic model and the other potential crash factors. The interaction terms
that were significant at the 5% level were included in the final set of the refined models.
A comparison of the estimation results of the basic and refined models showed that most
of the contributory factors showed consistent safety effects across these two groups of
models. The exception is that the insignificant variable (wide roadways) becomes
statistically significant when the interaction terms are considered for the KSI crash rate
(see Table 6.5). Thus, only the interaction effects in the refined models are discussed here.
As shown in Table 6.5, the interactions between (i) the proportion of taxi and high
intersection density, and (ii) the proportion of light goods vehicle and presence of on-
street parking, were significantly associated with slight-injury crash rate at the 5% level.
On the other hand, interactions between (iii) the proportion of medium- and heavy-goods
vehicle and high intersection density, and (iv) the proportion of medium and heavy goods
vehicle and a wide roadway (5 or more lanes) were significantly associated with KSI
crash rate at the 5% level (see Table 6.5).
Table 6.6 presents the marginal effects of the refined models. For example, for the cases
above the limit (with crashes), a 10% increase in the proportion of taxi is expected to
contribute to an increase in the slight-injury crash rate by 0.07, while it contributes to an
increase in the slight-injury crash rate of road segments with high intersection density by
0.14. Also, it is expected that a 10% increase in the proportion of light-goods vehicle
generally increases the slight-injury crash rate by 0.21, while it increases the slight-injury
crash rate of road segments with on-street parking areas by 0.53. Moreover, a 10%
increase in the proportion of medium- and heavy-goods vehicle is expected to increase
the KSI crash rate of road segments with high intersection density by 0.16, while it
decreases the KSI crash rate of road segments with more traffic lanes by 0.02.
On the other hand, for the cases at the limit (no crashes), the probability of having a slight-
123
injury crash is expected to be increased by 2.9%, due to a 10% increase in the proportion
of taxi on the road segments with high intersection density. The probability of having a
slight-injury crash is expected to increase by 10.5% for the road segments with on-street
parking areas, due to 10% increase in the proportion of light-goods vehicle. For the road
segments with high intersection density and zero-crash observation, the probability of
having a KSI crash is expected to increase by 6.8%, due to a 10% increase in the
proportion of medium- and heavy-goods vehicle.

124
Table 6. 4 Results of random-parameter Tobit model
Variable
Basic model
Refined model
Mean
S.D.
BCI
Mean
S.D.
BCI
2.5%
97.5%
2.5%
97.5%
Constant
5.844
1.050
4.018
7.948
5.736
0.873
4.145
7.646
Ln (2-hour traffic flow)
–1.009
0.088
–1.183
–0.841
–1.030
0.097
–1.214
–0.857
Average lane width
0.479
0.177
0.105
0.728
0.531
0.121
0.238
0.725
S.D. of Average lane width
1.151
0.035
1.089
1.215
1.149
0.031
1.089
1.212
Wide roadway (nr. of traffic lanes >4)
0.926
0.199
0.559
1.328
0.925
0.158
0.624
1.248
Speed limit
–0.008
0.007
–0.022
0.006
-
-
-
-
High intersection density (>3 per km)
1.120
0.219
0.717
1.545
-
-
-
-
Presence of on-street parking
1.818
0.352
1.169
2.501
-
-
-
-
Variables for commercial vehicle proportions
Public buses %
0.000
0.012
–0.022
0.024
-
-
-
-
Taxi %
0.029
0.008
0.013
0.046
0.019
0.010
0.001
0.038
Light-goods vehicle %
0.061
0.013
0.037
0.089
0.055
0.013
0.028
0.079
M&H-goods vehicle %
–0.026
0.013
–0.050
–0.001
–0.045
0.013
–0.073
–0.023
Time effect variables
5PM-9PM
0.630
0.177
0.302
0.987
0.554
0.211
0.134
0.905
Interaction effect variables
Taxi % × High intersection density
-
-
-
-
0.038
0.006
0.025
0.048
Light goods vehicle % × Presence of on-street parking
-
-
-
-
0.138
0.023
0.091
0.190
BCI refers to Bayesian credible interval
Boldface indicates statistical significance at the 5% level
Insignificant variables are retained in the basic model to account for the possible confounding effects on crash rates
In the refined model, only significant variables are retained
125
Table 6. 5 Random parameter Tobit model for KSI crash rate
Variable
Basic model
Refined model
Mean
S.D.
BCI
Mean
S.D.
BCI
2.5%
97.5%
2.5%
97.5%
Constant
0.435
0.201
0.055
0.844
0.425
0.258
–0.068
0.952
Ln (2-hour traffic flow)
–0.092
0.019
–0.130
–0.055
–0.108
0.024
–0.156
–0.062
Average lane width
0.124
0.036
0.040
0.189
0.121
0.057
0.022
0.232
S.D. of Average lane width
0.035
0.001
0.033
0.038
0.071
0.002
0.067
0.075
Wide roadway (nr. of traffic lanes >4)
0.041
0.037
–0.032
0.113
0.121
0.052
0.023
0.226
Presence of on-street parking
0.392
0.065
0.267
0.522
0.487
0.087
0.320
0.662
High intersection density (>3 per km)
0.168
0.079
0.012
0.323
-
-
-
-
S.D. of High intersection density
2.920
0.214
2.525
3.365
-
-
-
-
Speed limit
–0.001
0.001
–0.004
0.001
-
-
-
-
Variables for commercial vehicle proportions
Taxi %
–0.003
0.002
–0.006
4.13E-04
-
-
-
-
Public buses %
0.009
0.002
0.004
0.014
0.006
0.003
8.62E-05
0.011
Light-goods vehicle %
0.005
0.002
4.03E-04
0.009
0.005
0.002
1.26E-04
0.010
M&H-goods vehicle %
–0.006
0.002
–0.011
–0.002
-
-
-
-
Interaction effect variables
M&H-goods vehicle % × High intersection density
-
-
-
-
0.084
0.020
0.045
0.123
M&H-goods vehicle % × Wide roadway
-
-
-
-
–0.010
0.003
–0.016
–0.005
Boldface indicates statistical significance at the 5% level
Insignificant variables are retained in the basic model to account for the possible confounding effects on crash rates
In the refined model, only significant variables are retained.

126
Table 6. 6 Marginal effects results for the refined models
Slight-injury crash rate
KSI crash rate
Zero-crash
sensitivity
Zero-crash
sensitivity
Ln (2-hour Traffic flow)
-0.392
-7.83%
-0.020
-0.87%
Average lane width
0.202
4.04%
0.023
0.98%
More traffic lanes (>4)
0.352
7.03%
0.023
0.98%
Presence of on-street parking
--
--
0.091
3.94%
Public buses %
--
--
0.001
0.05%
Taxi %
0.007
0.14%
--
--
Light goods vehicle %
0.021
0.42%
0.001
0.04%
M&H goods vehicle %
-0.017
-0.34%
--
--
5pm-9pm
0.211
4.21%
--
--
Taxi % * High intersection density
0.014
0.29%
--
--
Light goods vehicle % * Presence of on-street parking
0.053
1.05%
--
--
M&H goods vehicle % * High intersection density
--
--
0.016
0.68%
M&H goods vehicle % * More traffic lanes
--
--
-0.002
-0.08%
Note: Zero crash sensitivity is determined as multiplying
by 100%
6.4.1 Effects of geometric factors
The model results suggest that the average lane width is positively associated with slight-
injury crash rate and KSI crash rate. Specifically, when the average lane width increases,
the rate of slight-injury crashes increases at 66.1% of the road segments and the rate of
KSI crashes increases at 100% of the road segments. This finding is generally consistent
with that of recent studies (Zeng et al., 2017b). This could be because drivers tend to be
less cautious and speed up when the traffic lane is wider. Therefore, potential crash and
injury risks both increase (Gross and Jovanis, 2007). Furthermore, heterogeneity for the
effect of lane width can be attributed to the variation in pavement surface condition and
driver response. In other words, the relationship between lane width and crash propensity
is not necessarily monotonic. As our results also suggest that 33.9% of the road segments
would experience reduction in slight-injury crash rate with an increase in average lane
width. Indeed, it has been reported that crash propensity increases when the lane width
first increases (known as ‘driver extreme cautious zone’), then decreases when the lane
width further increases (‘driver normal zone’), and eventually bounce back again
(‘reckless driving zone’) (Labi et al., 2017; Chen S., 2019b; Chen S. et al., 2019c; Chen
et al., 2020b). As such, it is worth exploring the non-linear relationship between lane
width and crash propensity when comprehensive information on driving behavior is
available in a future extended study. The analysis results also suggest that a wider
roadway (with more traffic lanes) is generally positively associated with slight-injury
127
crash rate, and this results could be attributed to increased lane-changing opportunities
when the number of lanes increases (Pei et al., 2012, 2016; Zeng et al., 2017b; Chen S. et
al., 2019c).
6.4.2 Effects of Traffic flow and traffic control
With regard to the effect of traffic flow, the two-hour overall traffic flow (logarithmic
form) is negatively associated with slight-injury and KSI crash rates. This result, which
suggests that the increased traffic volume would reduce the average travel speed of the
road segment and thereby decrease the likelihood of crash occurrence and severity, is
consistent with the findings of previous studies (Anastasopoulos et al., 2012a, 2012b;
Huang et al., 2016; Zeng et al., 2017a, 2017b, 2018). With regard to the effect of traffic
control, the results suggest that the presence of on-street parking increases slight-injury
and KSI crash rates. This aligns with the previous findings that higher crash propensity is
associated with more frequent roadside activities near the on-street parking areas (Pei et
al., 2016).
In addition, high intersection density was found to be positively associated with slight-
injury and KSI crash rates, which could be attributed to the effect of prevalent traffic
conflicts typically experienced at intersections (Wong et al., 2007; Sze and Wong, 2007).
However, our results also suggest that for 47.7% of the road segments, high intersection
density is associated with lower KSI crash rates. Such heterogeneous effect of intersection
density on KSI crash rate can be explained by the risk compensation theory (Mannering
and Bhat, 2014; Chen et al., 2017) where drivers adopt more cautious driving behavior to
compensate for the increased crash propensity arising from a complex driving
environment such as frequent intersections In particular, since pedestrian crashes at
intersections are more likely to be fatal or have serious injury (Zhai et al., 2019; Sze et
al., 2019), drivers generally may pay more attention to the pedestrian’s location and
behavior when driving through an intersection. As such, the lower KSI crash rate found
in some road segments with high intersection density could be attributed to the risk
compensation by drivers at these locations (Zeng et al., 2017b).
128
6.4.3 Temporal effect
The study did not find any temporal variations in the slight-injury and KSI crash rates
over the years of study. With respect to the time of day, it was determined that in the
period 5PM –9PM, the slight-injury crash rate is significantly higher than that of other
time periods at 5% level of significance. This is not surprising since such period covers
the evening peak hours that the city residents are off work and are engaging various
activities including homebound trip, shopping, and gathering with friends. In particular,
drivers tend to drive less cautiously during their off-work hours; therefore, at this period,
violation behaviours are relatively more prevalent, thus are characterized by higher crash
risk (Chin and Huang, 2009). Moreover, driving under the influence of fatigue
(particularly among commercial vehicle drivers) is more likely to occur during this period
(Boufous and Williamson, 2006). In contrast, no significant evidence was found for the
effect of time on KSI crash rate, suggesting that the temporal variation in crash rates are
different across the different levels of crash severity.
6.4.4 Main effects of commercial vehicle proportions (CVPs)
There exist anecdotal reports that the drivers of Hong Kong taxis and light-goods vehicles
tend to be risk-prone and aggressive because they are self-employed and their income
levels depend on the number and distance of their trips (Chen et al., 2020a; Meng et al.,
2017). It has also been found that taxi drivers in general, in several countries including
China, are more likely to involved in texting while driving, speeding, dangerous
overtaking and red light running (Wang et al., 2019a, 2019b; Nguyen-Phuoc et al., 2020).
The situation is exacerbated further by the taxi driver demographics: the aging taxi driver
population contributes to elevated crash propensity, as their driving performance is more
likely to be impaired plausibly due to deteriorating health, fatigue and slow response time
(Chen et al., 2019a, 2019b; Meng et al., 2017). Hence, it is not surprising that increases
in the proportions of taxi and light goods vehicle both are associated with higher rates of
slight-injury crashes.
Moreover, an increase in the proportion of light-goods vehicle is associated with an
increase in the KSI crash rate. Indeed, it could also be attributed to the difference in sense
of social responsibility across various types of professional drivers (Paleti et al., 2010).
129
For example, light-goods vehicle drivers who transport goods, presented a higher
tendency to commit traffic offenses and a higher injury risk, i.e., fatal and severe injury
(see Zhang et al., 2013, 2014), whereas a higher proportion of medium- and heavy-goods
vehicles is associated with lower rates of slight-injury and KSI crash rates. This result
could be due to the stricter regulation of the driving speed of medium- and heavy-goods
vehicles (Transport Department, 2020a). Besides the cognizance of the regulations,
heavy-goods vehicle drivers themselves tend to drive at a lower speed to compensate for
the elevated injury risk resulted from their higher vehicle weights (Saifizul et al., 2011).
On the other hand, it was expected that bus is a relatively safe transportation mode (Feng
et al., 2016). Bus drivers tend to be more risk averse because they typically possess a
stronger sense of social responsibility and lower preference to commit traffic offense
(possibly due to greater enforcement of regulations for heavy-vehicles operators) (Paleti
et al., 2010; Chen et al., 2020a; Öz et al., 2010, 2013). Surprisingly, our results showed
that the higher proportion of public buses is generally associated with a higher KSI crash
rate. This could be attributed to the exposure of commuters, the passenger capacity, the
size and weight of public buses, as well as the determination of crash severity levels
(Chimba et al., 2010; Feng et al., 2016; Tsui et al., 2009). In Hong Kong, crash severity
is determined based on the observations by police at scene and the follow-up hospital
records for up to 30 days. A severe injury crash refers to a traffic accident in which one
or more persons injured and detained in hospital for more than twelve hours. In this
context, larger capacity of passengers on the bus and higher exposure of commuters on
the road segments would contribute to the increase in KSI crash rate, as the severity level
is mainly determined by the people involved in the crash. Specifically, the passenger
capacity of public buses is much higher than that of other passenger vehicles (e.g., the
maximum capacity of a double-decker bus can reach 150 passengers, while that of a taxi
is 5 in Hong Kong). In addition, public buses in Hong Kong (including franchised bus
and public light bus) constitute 73% of overall road-based public transport patronage
(Transport Department, 2014). They are operated on fixed routes and schedules by
sizeable operators, which are regulated by the Hong Kong Transport Department. Road
segments with higher proportion of public buses tend to be located in Central Business
District, where the exposure of commuters tend to be very high on weekdays.
130
6.4.5 Interaction effects of CVPs and roadway attributes
Tables 6.4 and 6.5, which present the interaction effects, suggest that traffic control and
road geometry influence the relationship between commercial vehicle mix and slight-
injury crash rate. In particular, the increasing effect of taxi proportion on slight-injury
crash rate is magnified at road segments with high intersection density. This could be
attributed to the prevalence of traffic violations and reckless driving among taxi drivers
at intersections as evidenced in the literature. For example, Wu et al. (2016) revealed that
non-professional drivers generally tend to be more careful when driving through
intersections while taxi drivers are prone to committing red-light running and other
violations. Also, Xu et al. (2014) found that taxis are more likely to be involved in traffic
conflicts at intersections compared with other vehicle types. As such, greater emphasis
could be placed on enforcement strategies to combat the traffic violation behaviours by
taxi drivers at intersections. For example, Hong Kong presently has very few (195)
intersections with digital red-light cameras in operation (out of a total of 1,916 signalized
intersections) (Transport Department, 2017b, 2020b) and these could be significantly
increased. Based on our current finding, it is suggested that for expanding the red-light
camera network, priority could be given to road segments with relatively high proportions
of taxis. Besides, it is recommended that taxi drivers should be carefully regulated in
accordance with the licensing requirements. For example, the licensing office may invite
the taxi drivers (particularly those with a record of red-light running) to attend educational
program aimed at addressing risk-taking behaviour at intersections.
Similarly, the increasing effect of light-goods vehicle percentage on slight-injury crash
rate is magnified at road segments with on-street parking. In Hong Kong, on-street
parking is typically provided at the urban roads to facilitate direct access to the buildings.
Hence, it is likely that the road segments with on-street parking would have more frequent
roadside pick-ups, drop-offs, and loading/unloading activities involving light goods
vehicles (Sze and Wong, 2007). To address the higher crash propensity at on-street
parking areas, police patrols could be enforced at these areas, particularly at those urban
road segments that tend to have a higher proportion of light-goods vehicles. With regard
to medium- and heavy-goods vehicles on the other hand, the association between the CVP
percentage and the KSI crash rate seems to be moderated by the roadway width (number
of traffic lanes). Specifically, the decreasing effect of medium- and heavy-goods vehicle
131
percentage on KSI crash rate would be magnified by the increase in the roadway width.
A previous study revealed a dichotomous effect of heavy truck percentage on lane-
changing frequency across different traffic phases (e.g., free flow, synchronized flow and
congestion); however, the frequency of lane-changing events was found to decrease
remarkably with effective lane control measures for heavy trucks (Li et al., 2016). Hong
Kong road traffic regulations specify that medium- and heavy-goods vehicles are not
allowed to use the rightmost lane of expressway with three or more lanes in each
direction, and lane control measures implemented at such roadways are effective in
separating traffic flows by vehicle class. Thereby, such, possible conflicts between heavy
truck and other light vehicles, as well as the likelihood of fatal or serious-injury crashes,
are generally reduced (Mooren et al., 2014).
Finally, the association between medium- and heavy-goods vehicle percentage and KSI
crash rate was found to be moderated by intersection density (number of intersections
within a given unit length of road). In particular, an increase in medium- and heavy-goods
vehicle percentage would contribute to the increase in KSI crash rate of the road segments
with high intersection density. A possible explanation is the design of intersections. Over
the past decades, the dimension and weight of heavy vehicles have increased
substantially. Therefore, Dong et al. (2014) aptly questioned whether intersections
designed using earlier standards is capable of serving vehicles with various dimensions
and weights. The authors developed count models for intersection crashes and found that
an increase in the percentage of heavy trucks in the traffic stream contributes to the
increase in truck-involved crashes. Another possible explanation is the dilemma zone
driver behaviour. It was revealed that heavy truck drivers are less likely to decelerate in
response to a yellow stage of the traffic signal, thus contributing to a higher rate of red-
light running (Gates et al., 2007, 2010). Therefore, it is not surprising that in this study,
the KSI crash rate was found to be sensitive particularly to the interaction between high
intersection density and medium- and heavy-goods vehicle percentage. This result
suggests that the existence of a need for government road agencies to review the service
capability of the intersections at roads that serve a significant fraction of medium- and
heavy-goods vehicles; that way, it may be possible to reduce crashes caused by or related
to such vehicle classes at road intersections. On the other hand, to eliminate the risk-prone
behaviours of heavy-truck drivers in dilemma zones, trucking employers and freight

132
carriers could provide tailored training programs for their drivers to ensure enhanced
driving decisions and responsible driving behaviour.
6.5 Results and discussion on crash rates by vehicle type
Two models were considered to analyse the crash rates of three vehicle types: (i)
univariate Tobit model, and (ii) multivariate Tobit model. Results of DIC shown in Table
6.7 suggest that multivariate Tobit model outperforms the univariate one (difference in
DIC more than 10). Table 6. 8 presents the error parameters and goodness-of-fit of the
multivariate Tobit model. Significant correlation between crash rates across vehicle types
are found. The positive correlation between private car and light commercial vehicle, as
well as the negative correlation between private car and heavy commercial vehicle could
be attributed to the unobserved common risk factors affecting the crash rates across
vehicle types simultaneously. Moreover, it is likely that the significant correlations come
from the multiple-vehicle crashes. For example, the crash count used for calculating the
crash rate of private car includes private car only, private car-light commercial vehicle,
private car-heavy commercial vehicle, and private car-motorcycle crashes. Therefore,
when the number of private car-light commercial vehicle crashes increases, both the crash
rates of private car and light commercial vehicle increase. In either explanation,
multivariate analysis should be employed to accommodate the correlations between crash
rates.
Table 6. 7 Comparison of model performance
Multivariate Tobit
Univariate Tobit
Private car
Light commercial
vehicle
Heavy commercial
vehicle
25351
9168
8084
8286
pD
42
13
13
13
DIC
25393
9181
8097
8299

133
Table 6. 8 Multivariate Tobit model error parameters and goodness-of-fit
Mean
SD
95% BCI
*
private car
121.80
5.00
(113.8, 130.2)
light commercial vehicle
49.35
2.03
(46.12, 52.77)
heavy commercial vehicle
58.38
2.39
(54.56, 62.43)
(private car vs. light commercial vehicle)
0.379
0.025
(0.338, 0.420)
(private car vs. heavy commercial vehicle)
-0.053
0.029
(-0.101, -0.005)
(light commercial vehicle vs. heavy commercial vehicle)
-0.017
0.029
(-0.065, 0.031)
0.104
0.005
(0.095, 0.112)
0.126
0.005
(0.117, 0.133)
0.036
0.005
(0.027, 0.043)
0.084
0.002
(0.079, 0.087)
*BCI refers to Bayesian credible interval
Boldface indicates statistical significance at the 5% level
The estimation results of multivariate Tobit model are presented in Table 6.9. It is found
that number of lanes, average lane width, traffic flow, presence of on-street parking, and
year are associated with the crash rates of private car and light commercial vehicle, all at
the 95% credibility level. However, effect of intersection density is significant only for
light commercial vehicle. Time period is revealed to be associated with the crash rates of
private car and heavy commercial vehicle. For heavy commercial vehicle, two more risk
factors - number of lanes and traffic flow are found significantly affect its crash rate.
Difference in the risk factors to crash rates by vehicle type is discussed in the following
paragraphs.

134
Table 6. 9 Results of multivariate Tobit model
*BCI refers to Bayesian credible interval
Boldface indicates statistical significance at the 5% level
Insignificant variables are retained to account for the possible confounding effects on crash rates
Variable
Private car
Light commercial Vehicle
Heavy commercial Vehicle
Mean
SD
95% BCI
*
Mean
SD
95% BCI
*
Mean
SD
95% BCI
*
Constant
-1.339
2.284
(-5.075, 2.431)
0.928
1.455
(-1.438, 3.332)
0.669
1.568
(-1.934, 3.211)
Number of lanes
0.540
0.207
(0.202, 0.881)
0.359
0.132
(0.143, 0.576)
0.289
0.143
(0.054, 0.524)
Average lane width
1.533
0.434
(0.819, 2.246)
0.572
0.279
(0.112, 1.025)
0.245
0.300
(-0.249, 0.738)
Density of intersection
-0.023
0.082
(-0.157, 0.111)
0.252
0.052
(0.167, 0.338)
-0.025
0.056
(-0.118, 0.067)
Presence of on-street parking
3.053
1.274
(0.955, 5.148)
2.719
0.811
(1.384, 4.052)
1.100
0.883
(-0.356, 2.553)
Ln(4-hour traffic flow)
-2.501
0.521
(-3.363, -1.644)
-1.466
0.333
(-2.015, -0.923)
-1.317
0.362
(-1.909, -0.719)
Speed limit
-0.020
0.028
(-0.067, 0.026)
-0.017
0.018
(-0.046, 0.012)
-0.010
0.020
(-0.043, 0.021)
Temporal effect (reference: 7pm-11pm)
Time period 1 (7am-11am)
0.395
0.929
(-1.133, 1.926)
0.152
0.594
(-0.823, 1.130)
0.478
0.645
(-0.584, 1.538)
Time period 2 (11am-3pm)
1.938
0.925
(0.414, 3.455)
0.721
0.593
(-0.254, 1.695)
0.511
0.645
(-0.553, 1.569)
Time period 3 (3pm-7pm)
1.857
0.928
(0.332, 3.381)
0.440
0.595
(-0.537, 1.421)
1.549
0.648
(0.482, 2.614)
Year (reference: year 2015)
Year 2016
-1.108
0.778
(-2.386, 0.171)
-0.730
0.496
(-1.548, 0.086)
-0.193
0.538
(-1.078, 0.694)
Year 2017
-1.525
0.777
(-2.805, -0.250)
-1.422
0.495
(-2.236, -0.608)
0.494
0.537
(-0.389, 1.378)
135
6.5.1 Effects of geometric factors
For the effect of road geometry, average lane width is positively associated with private
car and light commercial vehicle crash rates. However, such finding is not applicable to
the crash rate of heavy commercial vehicle. This could be attributed to the differences in
gross vehicle weight and dimensions (mainly the vehicle width) across vehicle types. In
particular, the weight of heavy commercial vehicle (e.g. 24 tonnes) is much higher than
that of private car (e.g. 3.0 tonnes) or light commercial vehicle (e.g. 5.5 tonnes). Indeed,
the consequences of crashes involving professional drivers, especially drivers of buses
and heavy goods vehicles, are often mortality and severe injury of other innocent road
users (Alvarez and Fierro, 2008). Therefore, to control vehicle trajectories and avoid lane
departure events, various systems have been developed and installed to stabilize the
lateral position of heavy vehicles (Imine et al., 2011; Netto et al., 2004; Hingwe et al.,
2002). On the other hand, crash rates of private car and light commercial vehicle would
increase with the increase in average lane width of road segments. This could be attributed
to driver’s reckless driving on the wider lane (Labi et al., 2017). The increase in average
lane width appears to provide relatively more space for light vehicles, which may imbue
a false sense of security to drivers, thus leading to degraded driving performance.
Moreover, wider lane in general leads to more overtaking events, in which private car,
taxi, and light goods vehicle drivers tend to overtake aggressively (Shackel and Parkin,
2014).
Number of lanes is associated with a positive coefficient for the crash rates of private car,
light commercial vehicle, and heavy commercial vehicle. This finding suggests that crash
risk would increase with the increase in lane-changing opportunities (Pei et al., 2012,
2016; Zeng et al., 2017b). Furthermore, effect of intersection density is found significant
only for the light commercial vehicles. This could be attributed to the prevalence of traffic
violations among light commercial vehicle drivers (Chen et al., 2020; Meng et al., 2017).
For example, light bus drivers have a higher tendency of red light running, speeding,
and/or stopping at intersections (Wong et al., 2008), while bus drivers tend to drive in a
cautious manner with a greater sense of social responsibility (Chen et al., 2020; Paleti et
al., 2010). Consistently, Wu et al. (2016) revealed that non-professional drivers are more
careful when driving through the intersection while taxi drivers are inclined to commit
136
red-light running. Moreover, taxis are more likely to be involved in traffic conflicts at
intersections compared with private cars (Xu et al., 2014). Hence, crash rate of light
commercial vehicle increases when intersection density of the road segment increases.
Presence of on-street parking increases the crash rates of private car and light commercial
vehicle. This aligns with the previous findings that higher crash risk is associated with
more frequent roadside activities near the on-street parking areas (Pei et al., 2016). In
Hong Kong, on-street parking areas are normally provided for the urban roads giving
direct access to the buildings. Hence, it is likely that the road segments with on-street
parking would have more frequent roadside pick-ups, drop-offs, and loading/unloading
activities involving private cars and light commercial vehicles (Sze and Wong, 2007).
Moreover, these roadside activities could translate into more frequent incidences of errant
pedestrian behavior (such as reckless crossing), thus increasing pedestrian-vehicle crash
frequency (Kim et al., 2017; Granié et al., 2014; Ukkusuri et al., 2012).
6.5.2 Effects of traffic condition and time
Regardless of the crash types, crash rates are generally lower when the overall traffic flow
increases. This could be because the mean travel speed of the road segment reduces when
the traffic volume increases (Huang et al., 2016; Zeng et al., 2017a, 2017b). However,
previous study also revealed that increase in exposure would lead to higher crash risk (Pei
et al., 2012, 2016). In this study, the four-hour traffic flow (in a logarithmical form) is
also considered as one of the exposure measures to the risk involved. As such, it would
be worth introducing other exposure measures such as the flows of different vehicle types
in the proposed crash prediction models. In addition, although it is expected that speed
limit would present different effects on crash rates by vehicle type, no significant
evidence could be established based on the current results.
As for the temporal variation, the crash rates of private car and light commercial vehicle
are found to be statistically lower in year 2017 compared with 2015 (see Table 6.9). Such
reductions in crash risk appear to be a favourable consequence of implementing various
road safety measures (e.g. penalty and enforcement strategies against traffic offences,
driver educational and training programs, and road remedial works, etc.). Moreover, as
137
discussed in Pei et al. (2016), the relationship between year and crash risk could possibly
resulted from the effects of other confounding factors over time. As such, it would be
more appropriate to say, effect of the crash year is used as a proxy to the effects of
unobserved risk factors.
With respect to the time of day, crash rate of private car is higher during noon (11am-
3pm) and afternoon (3pm-7pm), as compared to the evening period (7pm-11pm). This is
not surprising since such periods cover the afternoon peak hours that private car drivers
are off work for various activities (e.g. back home, shopping, gathering with friends, etc.).
Higher exposure of private cars on road during afternoon peak hours would contribute to
their higher crash risk. Moreover, private car drivers tend to drive less cautiously during
their off-work hours, when violation behaviours are prevalent, thus increasing the crash
risk (Huang and Chin, 2009). Also, it is revealed that heavy commercial vehicle would
have higher crash risk during the afternoon period (3pm-7pm). In contrast, no significant
evidence was found for temporal variation in the crash rate of light commercial vehicle.
Nevertheless, effects of time on crash rates are revealed to be different across vehicle
type, suggesting different temporal patterns for crash risks across vehicle types.
6.6 Concluding remarks
This chapter proposes two research objectives, 1) to throw more light on the moderating
(mitigating) or magnifying (exacerbating) safety effects of the interaction between
commercial vehicle proportion and road features, and to provide some indication of the
variation of these mediating effects across the commercial vehicle classes, 2) to
simultaneously estimate the crash rates of private car, light commercial vehicle, and
heavy commercial vehicle using the same set of possible risk factors. Effects of road
geometry, traffic control and time period are also considered. Such knowledge could help
urban road authorities develop more context-sensitive and effective roadway design and
commercial traffic operations policies for overall urban road safety enhancement. The
Bayesian random parameter Tobit model and multivariate Tobit model are adopted
respectively for the two objectives, to account for unobserved heterogeneity across
observations and unobserved shared effects across crashes of different vehicle types.
138
For the first objective, the influence of the proportions of each class of commercial
vehicles (bus, taxi, light-goods vehicle, and medium- and heavy-goods vehicles) on crash
rates, for different levels of crash injury severity, were examined. The effects of road
geometry, traffic control and time of day were also investigated. The study also
investigated whether the association between the commercial vehicle percentage and
crashes is moderated by prevailing roadway attributes. The study used random parameters
techniques within a Bayesian Tobit modelling framework, to accommodate possible
heterogeneous effects of the crash factors across the observations. Results suggest that
increases in the proportions of taxi and light-goods vehicle contribute to higher rates of
slight-injury crashes, while the proportion of medium- and heavy-goods vehicles showed
the opposite effect. Also, KSI crash rate decreases with the increase in the proportion of
medium and heavy goods vehicle, while the proportions of public buses and light-goods
vehicle impose an increasing effect. More importantly, significant interaction effects of
commercial vehicle proportions and roadway attributes were revealed in this study. First,
the increasing effect of taxi proportion on slight-injury crash rate is magnified at road
segments that have high intersection density, second, the increasing effect of light-goods
vehicle proportion on slight-injury crash rate is magnified at road segments with on-street
parking, and third, the association between the medium- and heavy- goods vehicle
proportion and KSI crash rate is moderated by the roadway width (number of traffic lanes).
Fourth, an increase in the proportion of medium- and heavy-goods vehicles contributes
to the increase in KSI crash rate of the road segments with high intersection density.
This study bridges the gap in the literature on the interaction between roadway attributes
and commercial vehicle percentages on crash rates, for different levels of crash severity.
The findings of this research provide the transport authority some policy implications in
terms of the further expansion of the red-light camera system, licensing requirements,
arrangement of human police patrols, lane control measures, and review of roadway
design. As there exist limited options to reduce the crash exposure of commercial vehicles,
it is necessary to mitigate their crash risk by improving the safety climate associated with
the operations of trucking companies and regulating the behaviour of their professional
drivers. Therefore, the results of this study can help enhance driver education and training
139
programs that can enhance the social responsibility and safe driving behaviours of
professional drivers.
For the second objective, results show that significant correlations exist between crash
rates across vehicle types. In particular, positive coefficient is found for the correlation
between private car and light commercial vehicle, while negative coefficient is found for
the correlation between private car and heavy commercial vehicle. Effects of average lane
width and presence of on-street parking are significant only for the crash rates of private
car and light commercial vehicle. This could be attributed to the difference in vehicle
characteristics (e.g. gross weight and dimensions), as well as more frequent roadside
activities involving private cars and light commercial vehicles. On the other hand,
previous studies reveal that drivers of light commercial vehicle show higher probability
of traffic violations at intersections, compared with private car and heavy vehicle drivers.
Consistently, our results show that intersection density has statistically significant
increasing effect only for the crash rate of light commercial vehicle. In addition,
significant associations between risk factors including number of lanes, traffic flow, and
temporal variation, and crash rates across three vehicle types are revealed.
To summarize, contribution of this study is twofold. First, it enhances the understanding
on the interaction between commercial vehicle percentages and roadway attributes on
crash rates. Second, risk factors associated with the crash rates across different vehicle
types are identified using the multivariate Tobit regression approach. As it is not viable
to reduce the crash exposure of commercial vehicles, it is necessary to mitigate their crash
risk by moderating the behaviour of professional drivers and crashworthiness of
commercial vehicle fleets. Yet, this study is limited to the major roads that have
continuous and detailed traffic count data. In the extended study, it is worth exploring the
effects of other road environment factors like road class and traffic control when
comprehensive vehicle trajectory data from the transport agency or operators is available.
140
Chapter 7 Conclusions and recommendations
7.1 General conclusions
In this study, attempts have been made to assess safety of professional drivers in Hong
Kong from the behavioural, psychological, and empirical perspectives. First, we
conducted simulators studies to evaluate the interaction between better driving skills of
professional drivers and age-related impairments on driving performance of elderly
drivers, using both conventional performance indicators and surrogate safety measures.
Second, we applied deterrence theory and stated preference survey to investigate the
perceptions and attitudes of professional drivers towards the traffic legislation, in terms
of the penalty and enforcement strategies. Lastly, we developed prediction models for
crash rates by injury severity and vehicle type, incorporating the factors of commercial
vehicle mix, road geometry, traffic control, and time period. Overall, findings of the
driving simulator studies, the perception survey of professional drivers, and the crash risk
analysis of commercial vehicles would provide useful insights into the training and
education, driver management strategies of the transport operators, as well as the driver
licensing policy and enforcement effectiveness of the authorities. Therefore, safety
performance of professional drivers would be enhanced in the long run.
Chapter 2 reviews the literature on the safety of professional drivers, with respect to
driving performance, perception and attitude, and crash risks. Driving under the influence
of fatigue, compensatory and adaptive driving of professional drivers can be measured
using driving simulator approach. Conventional driving performance indicators such as
lateral, steering and speed controls over the vehicle, as well as surrogate safety measures
such as time-to-collision, headway and braking time, are commonly used to assess the
safety of drivers from the behavioural perspective. From the psychological perspective,
questionnaire survey is widely used to measure drivers’ perceptions, attitudes, and self-
reported behaviours. More importantly, emphasis was given to the drivers’ perceptions
towards traffic legislation in terms of penalty and enforcement. Also, findings of the
empirical studies indicating the crash risks of various commercial vehicle types are
presented. An obvious research gap existed for the effects of increasing elderly drivers in
141
the transport sector on road safety. Effects of age, road environment and traffic condition
on the driving performance have been attempted in previous research. However, the
moderating effects by better driving skill and task familiarity of professional drivers have
yet to be explored. Another research gap lays in the evaluation of professional drivers’
perceptions and attitudes towards traffic legislation. As revealed by previous studies,
professional drivers show higher traffic violation rates and propensity to aggressive
driving. It is necessary to apply perception survey to enhance the understanding and
effectiveness of penalty and enforcement strategies. Last but not least, driver behaviour
and crashworthiness of different vehicle types are different. A study examining the safety
effects of the commercial vehicle proportions is thus urgently needed. Overall, the
aforementioned deficiencies motivated us to bridge the gap in the safety assessment of
professional drivers.
Of the road crashes involving personal injury in Hong Kong, over 70% involved at least
one commercial vehicle. Besides, the proportion of older drivers in the transport sector
has been increasing due to the shortage of labor and aging population. It is believed that
increase in age can have adverse impact on driving performance, even that professional
drivers may possess better driving skill than non-professional drivers and the age-related
impairment can be reduced by task familiarity of professional drivers. In Chapter 3, a
driving simulator experiment was conducted to address this question. Additionally,
possible factors that affect the driving performance of professional drivers and that of
non-professional drivers were examined. A total of 50 participants were recruited and 94
tests were completed. Driving performance was assessed in terms of standard deviation
of lateral position (SDLP), standard deviation of heading error (SDHE), mean heading
error (MeanHE) and standard deviation of speed (SDspeed). Results of random intercept
models indicate that lateral and speed control performances of mid-aged drivers were
better than those of older drivers. Then, disaggregated models were established for
professional and non-professional drivers respectively based on the results of market
segmentation analysis. It is found that lateral and speed control performance of mid-aged
professional drivers were better than that of older professional drivers. In contrast, older
non-professional drivers were more likely to have degraded steering performance under
high traffic conditions. Results of this study are indicative to the driver management
142
strategies of the transport operators for sustained safety improvement of commercial
vehicle fleet.
In Chapter 4, we attempt to examine the compensatory behavior and its safety effect
amongst older professional drivers, as compared to those of older non-professional
drivers, using the driving simulator approach. It has been a controversial issue for the
effect of ageing population on driving safety. Apparently, drivers’ physiological and
cognitive performances deteriorate with age. However, older drivers may compensate for
the elevated risk by adjusting their behaviors, known as compensatory strategy. Despite
the extensive research on this topic, the compensatory strategy of older professional
drivers is not well understood since many studies focused on the differences in
compensatory behavior between older and young drivers. Professional drivers tend to be
more skillful and able to cope with the unfavorable driving environments, thus presenting
a higher capability to mitigate the risk. In the driving simulator experiment, participants
were asked to follow a leading vehicle for one hour, and two sudden brake events were
presented. 41 (mid-aged and older) drivers completed the driving tests. Each participant
was required to complete a car-following test, either under high or low traffic flow
conditions. Performance indicators include driving capability (i.e. lateral control,
longitudinal control, and brake reaction time) and compensatory behavior (i.e. average
speed, and time headway). Additionally, two modified traffic conflict measures: time
exposed time-to-collision (TET) and time integrated time-to-collision (TIT) are applied
to indicate the traffic conflict risk. The random parameter Tobit models were estimated
to measure the association between conflict risk and driver attributes, and random
intercept models were used to assess other driving performance indicators. Results show
that despite the impaired lateral control performance and longer brake reaction time of
older drivers, the likelihood of severe traffic conflict of older drivers is lower than that of
mid-aged drivers. Furthermore, though both older professional and older non-
professional drivers adopted longer time headway, the reduction in the risk of severe
traffic conflict is more profound among the older professional drivers. Such findings
suggest that older professional drivers are more capable of mitigating the possible
collision risk by adopting the compensatory strategy, as compared to older non-
professional drivers. This justifies the existence of compound effect by the compensatory
strategy of older driver and better driving skills of professional driver. This research
143
provides useful insights into driver training and management strategies for employers, as
older drivers would become a major cohort in the transportation industry.
Next, for the drivers’ perceptions and attitudes, Chapter 5 presents an evaluation of the
effectiveness of different penalty and camera-based enforcement strategies in curbing
speeding offences by professional drivers in Hong Kong. A stated preference survey
approach is employed to measure the association between penalty and enforcement
strategies and drivers’ speed choices. Data suggest that almost all drivers comply with
speed limits when they reach a camera housing section of the road. For other road
sections, a panel mixed logit model is estimated and applied to understand the
effectiveness of penalties and enforcement strategies on driver’s speeding behaviors.
Driving-offence points (DOPs) are found to be more effective than monetary fines in
deterring speeding offences, albeit there is significant heterogeneity in how drivers
respond to these strategies. Warning drivers of an upcoming camera-based enforcement
section increased speed compliance. Several demographic and employment
characteristics, driving history and perception variables also influence drivers’ choices of
speed compliance. Finally, besides penalty and enforcement strategies, driver education
and training programs aimed at addressing aggressiveness/risk-taking traits might help
reduce repeated speeding offences among drivers.
Finally, in Chapter 6, we aim to examine the main and interaction effects of commercial
vehicle proportion (CVP) and roadway attributes on the overall crash rates, and to conduct
a multivariate analysis of crash rates by vehicle type. First, a random-parameter Tobit
model was used to measure the relationships between the CVP and crash rates by severity
level. Second, a multivariate Tobit model is applied to identify the risk factors affecting
the crash rates across different vehicle types (including private car, light commercial
vehicle, and heavy commercial vehicle). A comprehensive database integrating the crash,
traffic and road inventory data of the target road segments in Hong Kong was used. The
results suggest that the CVP of each class significantly and directly affect the crash rates,
for the various crash severity levels. The results also suggest that the interaction between
CVP and roadway attributes is significant enough to mediate the effect of CVP on crash
rates, and the magnitude and direction of such mediation varies across the vehicle classes,
crash severity levels, and roadway attribute type in four ways. First, the increasing effect
144
of taxi proportion on slight-injury crash rate is magnified at road segments with high
intersection density. Second, the increasing effect of light-goods vehicle proportion on
slight-injury crash rate is magnified at road segments with on-street parking. Third, the
association between the medium- and heavy-goods vehicle proportion and killed/severe
injury (KSI) crash rate, is moderated by the roadway width (number of traffic lanes).
Finally, a higher proportion of medium- and heavy-goods vehicles generally contributes
to increased KSI crash rate at road segments with high intersection density. Furthermore,
the results of crash rates across three vehicle types show that correlations exist between
crash rates across vehicle types. Crash risks of private car and light commercial vehicle
are affected by number of lanes, average lane width, traffic flow, presence of on-street
parking, and year. While effect of intersection density is significant only for the light
commercial vehicle. For the crash risk of heavy commercial vehicle, three risk factors -
number of lanes, traffic flow, and time period are significant. Overall, the findings of this
research are expected not only to help guide commercial vehicle enforcement strategy,
licensing policy, and lane control measures, but also to review existing urban roadway
designs to enhance safety.
7.2 Main findings and contributions
This thesis has assessed the safety of professional drivers in Hong Kong by addressing
five research questions from the behavioural, psychological, and empirical perspectives:
1) whether age-related impairments on driving performance can be reduced by the driving
experience and task familiarity of professional drivers, 2) whether the compensatory
strategies of older drivers are different between professional and non-professional drivers,
3) how the penalty and enforcement strategies deter professional drivers from traffic
violations, 4) whether the relationship between commercial vehicle proportions and
crashes can be moderated by roadway attributes, and 5) whether the effects of risk factors
vary across crashes categorized by vehicle type. The main findings are concluded below.
1) Driving performance of professional drivers
Results of the driving simulator experiment evidence the better driving skill of
professional drivers and impaired driving performance of older drivers. It is revealed
145
that age-related impairments on driving performance (i.e. steering control) could be
reduced by the driving experience and task familiarity of professional drivers.
2) Conflict risk of professional drivers
Two modified traffic conflict measures: time exposed time-to-collision (TET) and
time integrated time-to-collision (TIT) are applied to indicate the traffic conflict risk.
Though both older professional and older non-professional drivers adopted longer
time headway for risk compensation, a more profound reduction in conflict risk is
found for the older professional drivers.
Older professional drivers are more capable of mitigating the possible collision risk
by adopting the compensatory strategy, as compared to older non-professional
drivers.
3) Perceptions and attitudes of professional drivers
A stated preference approach was employed to evaluate the deterrent effects of
penalty and enforcement strategies on the speeding behaviours of professional
drivers.
Driving-offence points are found to be more effective than monetary fines in
deterring speeding offences among professional drivers. Also, warning drivers of an
upcoming camera enforcement section increased speed compliance.
4) Safety effect of commercial vehicle mix
This study examines the moderating effects of roadway attributes on the association
between commercial vehicle proportion and crash rate.
Small commercial passenger vehicle (taxi) proportion: effect on slight-injury crash
rate is moderated by intersection density.
Light-goods commercial vehicle proportion: effect on slight-injury crash rate is
magnified by the presence of on-street parking.
Medium- and heavy-goods vehicle proportion: association with KSI crash rate is
moderated by the number of traffic lanes and intersection density.
146
5) Risk factors to crash rates of different vehicle types
Vehicles are categorized into three types — private car, light commercial vehicle,
and heavy commercial vehicle.
A Bayesian multivariate Tobit model was used to estimate the crash rates of private
car, light commercial vehicle, and heavy commercial vehicle simultaneously.
Significant correlations exist between crash rates across vehicle types.
Effects of geometric factors and traffic control on crash rates vary among different
vehicle types.
Based on the results from the proposed research questions, this thesis is able to make
contributions to driver recruitment and management strategies, effective penalties and
enforcement strategies against traffic violations, as well as safety countermeasures
tailored for professional drivers. Here suggest some potential implications derived from
the above findings. For examples, (i) in the context of the driver recruitment and
management in an aging society like Hong Kong, transport operators should not make
decisions solely based on driver age. Instead, rigorous assessment of driving skills and
training programs should be provided for the older drivers. (ii) For the effectiveness of
penalties, combining the quantity of fines with appropriate warning messages could
probably increase the deterrent effect of monetary fines. Further, higher penalties could
be considered for repeat offenders. Moreover, equipping all dummy camera housing
boxes with actual speed cameras may not necessarily enhance the effectiveness of
camera-base enforcement. (iii) Increases in the proportions of taxi, light bus, light goods
vehicle is associated with increase in the crash rates of the studied road segments.
Transport authorities or operators should provide taxi, light bus and light goods vehicle
drivers with additional training programs aimed to reduce risk-taking and aggressive
driving traits. (iv) Effects of geometric factors and traffic control vary across the crash
rates of private car, light commercial vehicle, and heavy commercial vehicle. This would
provide useful insights for the roadway safety design. For instance, engineers would
consider whether a particular design (e.g. lane width, intersection) is capable of serving
heavy vehicles and private cars simultaneously.
147
7.3 Limitations
Despite the contributions to the literature described in the above paragraphs, this research
should be interpreted in the context of the limitations. Firstly, with respect to the simulator
studies, effect of gender on driving performance is not attempted. The driving
performances of male drivers only are assessed in the driving simulator experiment, given
the relatively small sample size. In addition, although many previous studies have
demonstrated the absolute and relative validity of the simulator experiment, the ability of
simulator studies to reflect realistic driving is often questioned. Naturalistic driving
studies could aid in verifying the findings of our simulator studies. In particular, car
following behaviour of professional drivers at work could be influenced by time pressure
and market competition. However, it is not possible to incorporate the effect of work
pressure in the driving simulator study. Moreover, compensatory strategy could be
prevalent for the drivers who have known cognitive impairment and crash involvement
records. However, the cognitive ability of older drivers is not examined in current study.
Secondly, for the stated preference survey, the study merely investigates a few
demographics and operational characteristics of professional drivers, while the
information on the psychological metrics of the participants is not collected. In addition,
our scenarios are limited to a typical city road with a speed limit of 50km/h. Moreover,
for the attribute associated with the placement of the warning sign, distance of 50 meters,
100 meters, 150 meters, and 200 meters upstream of the speed camera housing are
considered in the survey setting. Perhaps a time separation rather than a space separation
(between the placement of a warning sign and the camera housing unit) would be better
capture how individuals respond to warning signs before entering monitored roadway
section. It is also important to note, findings of this study are based on self-reported speed
choices within stated experiments, which could influence the reliability and accuracy of
the relationships estimated. A study based on an actual field experimental design and field
observations of speed at different sections would be more credible. Finally, for sensitive
questions related to social desirability, a self-administered or internet survey could
improve the reliability of the survey, despite that face-to-face interviews help receive
more serious responses from the participants.
148
There were limitations for the crash rate analysis as well. First, its scope is limited to the
major roads that have continuous and detailed traffic count data. Also, due to the data
availability, this study only considered weekday crashes. Moreover, the effects of other
road attributes such as road functional class, horizontal alignment and the mean speed of
traffic are not attempted. Last but not least, consistent with the positions of Zhai et al.
(2019), Xing et al. (2019), and Gao et al. (2020), it will be worth exploring, when
comprehensive weather information is available, the moderating effects of weather
conditions on the association between commercial vehicle percentage and crash rates.
7.4 Recommendations for future research
Section 7.1 and 7.2 has outlined the contributions of this thesis to the safety assessment
of professional drivers through the behavioural, psychological, and empirical studies. Yet,
the current work can be further extended in the future. The recommendations for future
research in four aspects are listed.
7.4.1 Conventional driving performance measured by simulator
Further studies could explore the possible effect of personal characteristics on the level
of aggressiveness, and thus the driving behaviour, when more comprehensive information
on the psychological metrics of participants is available. Similarly, the effects of driving
history (e.g. crash involvement, traffic offense) and risk perception of professional drivers
on the driving performance should be attempted. The effect of gender on the temporal
change in driving performance of professional drivers could be explored. Moreover,
cognitive measures for the elderly drivers could be adopted, as well as the subjective or
physiological measures for mental workload and fatigue. Furthermore, effects of
environmental factors such as road design, lighting condition and weather on the driving
performance of professional drivers can be revealed in extended study.
7.4.2 Traffic conflict analysis using driving simulator
Driving simulator can capture the driving behaviour and vehicle trajectory data in a
controlled driving environment. Thus, it could be a promising approach for traffic conflict
149
analysis in the future. In addition, other surrogate measures such as headway, post
encroachment time, lateral distance to departure, etc., can be adopted in driving simulator
experiments to explore their applicability. Moreover, other critical events (e.g. pedestrian
crossing; car incursion from roadside) can be incorporated into experimental design to
assess the driver’s conflict risk in different situations. Furthermore, effects of other driver
characteristics (e.g. income, vehicle type, salary system), driving history, and safety
perception on drivers’ conflict risks certainly constitute important avenues for future
research as the findings from these studies could be indicative to the safety management
of professional drivers.
7.4.3 Perception survey
In addition to a few demographics and operational characteristics of professional drivers,
it would be worth exploring the possible effects of latent characteristics on the propensity
and severity of traffic offense, when more comprehensive information on the
physiological and psychological metrics of the participants is available. Moreover, other
driving environments could be incorporated in the stated preference design. It would be
interesting to explore the effects of different road environments on the violation behaviour
of professional drivers. On the other hand, the perceptions and attitudes of private car
drivers towards the penalty and enforcement strategies could be revealed in the extended
study for a comparable result. Also, similar approach can be applied to examine the
deterrent effect of police surveillance, as drivers would perceive differently when
encountering automated enforcement systems and manual enforcement.
7.4.4 Crash risk analysis for commercial vehicles
In future studies, it will be worthwhile to explore the safety effects of other road attributes
such as road class, horizontal alignment and average vehicle speed of traffic when more
comprehensive data are available. Furthermore, the study did not include the crash
pattern, and therefore, in a future study of this kind, it will be illuminating to consider that
factor using a multivariate approach. For the multivariate analysis, possible
heterogeneous effects of risk factors across observations should be carefully considered
by introducing random parameters. Also, defining an exposure measure is critical in crash
150
risk assessment. As such, it would be worth introducing other exposure measures such as
the flow of vehicles by different modes in crash prediction models.
Moreover, the safety effects of behavioural attributes of commercial vehicle drivers could
be insightful to the practical effectiveness of traffic control and management strategies
geared towards commercial vehicle safety enhancement and could be considered in future
studies. Last but not least, it may be worthwhile collecting comprehensive weather
information and including such data in similar future analysis. That way, the moderating
effects of weather conditions on the association between commercial vehicle percentage
and crash rates. Prospectively, the information to be earned from all such future research
could help the road agency refine existing driver regulations and streamline urban traffic
control and management strategies related to commercial vehicle operations and safety.

151
References
Abdel-Aty, M., Uddin, N., Pande, A., Abdalla, M. F., & Hsia, L. (2004). Predicting
freeway crashes from loop detector data by matched case-control logistic
regression. Transportation Research Record, 1897(1), 88-95.
Abdel-Rahim, A., & Sonnen, J. (2012). Potential safety effects of lane width and shoulder
width on two-lane rural state highways in Idaho (No. FHWA-ID-12-200). Idaho.
Transportation Department.
Aguero-Valverde, J., & Jovanis, P. P. (2008). Analysis of road crash frequency with
spatial models. Transportation Research Record, 2061(1), 55-63.
Ahlström, C., Anund, A., Fors, C., & Åkerstedt, T. (2018). Effects of the road
environment on the development of driver sleepiness in young male
drivers. Accident Analysis and Prevention, 112, 127-134.
Ahmed, M. M., Abdel-Aty, M., & Yu, R. (2012). Assessment of interaction of crash
occurrence, mountainous freeway geometry, real-time weather, and traffic
data. Transportation Research Record, 2280(1), 51-59.
Ahmed, M., Huang, H., Abdel-Aty, M., & Guevara, B. (2011). Exploring a Bayesian
hierarchical approach for developing safety performance functions for a
mountainous freeway. Accident Analysis & Prevention, 43(4), 1581-1589.
Ajzen, I. (1991). The theory of planned behavior. Organizational behavior and human
decision processes, 50(2), 179-211.
Alarifi, S. A., Abdel-Aty, M., & Lee, J. (2018). A Bayesian multivariate hierarchical
spatial joint model for predicting crash counts by crash type at intersections and
segments along corridors. Accident Analysis & Prevention, 119, 263-273.
Albertsson, P., & Falkmer, T. (2005). Is there a pattern in European bus and coach
incidents? A literature analysis with special focus on injury causation and injury
mechanisms. Accident Analysis & Prevention, 37(2), 225-233.
Ali, Y., Haque, M. M., Zheng, Z., Washington, S., & Yildirimoglu, M. (2019). A hazard-
based duration model to quantify the impact of connected driving environment on
safety during mandatory lane-changing. Transportation Research Part C: Emerging
Technologies, 106, 113-131.

152
Alvarez, F. J., & Fierro, I. (2008). Older drivers, medical condition, medical impairment
and crash risk. Accident Analysis & Prevention, 40(1), 55-60.
Álvarez, P., Fernández, M. A., Gordaliza, A., Mansilla, A., & Molinero, A. (2020).
Geometric road design factors affecting the risk of urban run-off crashes. A case-
control study. Plos One, 15(6), e0234564.
Anastasopoulos, P. C. (2016). Random parameters multivariate tobit and zero-inflated
count data models: addressing unobserved and zero-state heterogeneity in accident
injury-severity rate and frequency analysis. Analytic Methods in Accident
Research, 11, 17-32.
Anastasopoulos, P. C., Mannering, F. L., Shankar, V. N., & Haddock, J. E. (2012a). A
study of factors affecting highway accident rates using the random-parameters tobit
model. Accident Analysis & Prevention, 45, 628-633.
Anastasopoulos, P. C., Shankar, V. N., Haddock, J. E., & Mannering, F. L. (2012b). A
multivariate tobit analysis of highway accident-injury-severity rates. Accident
Analysis & Prevention, 45, 110-119.
Anastasopoulos, P. C., Tarko, A. P., & Mannering, F. L. (2008). Tobit analysis of vehicle
accident rates on interstate highways. Accident Analysis & Prevention, 40(2), 768-
775.
Anastasopoulos, P.C., & Mannering, F. L. (2009). A note on modeling vehicle accident
frequencies with random-parameters count models. Accident Analysis &
Prevention, 41(1), 153-159.
Andrews, E. C., & Westerman, S. J. (2012). Age differences in simulated driving
performance: Compensatory processes. Accident Analysis & Prevention, 45, 660-
668.
Arnedt, J. T., Geddes, M. A. C., & MacLean, A. W. (2005). Comparative sensitivity of a
simulated driving task to self-report, physiological, and other performance measures
during prolonged wakefulness. Journal of Psychosomatic Research, 58(1), 61-71.
Audit Commission of Hong Kong Special Administrative Region. (2013, March).
Administration of Road Safety Measures. Retrieved July 10, 2018, from
https://www.aud.gov.hk/eng/pubpr_arpt/aud_TraDep.htm
Autey, J., Sayed, T., & Zaki, M. H. (2012). Safety evaluation of right-turn smart channels
using automated traffic conflict analysis. Accident Analysis & Prevention, 45, 120-
130.

153
Azimi, G., Rahimi, A., Asgari, H., & Jin, X. (2020). Severity analysis for large truck
rollover crashes using a random parameter ordered logit model. Accident Analysis
& Prevention, 135, 105355.
Ballesteros, M. F., Dischinger, P. C., & Langenberg, P. (2004). Pedestrian injuries and
vehicle type in Maryland, 1995–1999. Accident Analysis & Prevention, 36(1), 73-
81.
Bao, J., Liu, P., & Ukkusuri, S. V. (2019). A spatiotemporal deep learning approach for
citywide short-term crash risk prediction with multi-source data. Accident Analysis
& Prevention, 122, 239-254.
Barua, U., & Tay, R. (2010). Severity of urban transit bus crashes in Bangladesh. Journal
of Advanced Transportation, 44(1), 34-41.
Behnood, A., & Mannering, F. (2019). Time-of-day variations and temporal instability of
factors affecting injury severities in large-truck crashes. Analytic Methods in
Accident Research, 23, 100102.
Bélanger, A., Gagnon, S., & Yamin, S. (2010). Capturing the serial nature of older drivers’
responses towards challenging events: A simulator study. Accident Analysis &
Prevention, 42(3), 809-817.
Bhat, C. R. (1997). Work travel mode choice and number of non-work commute
stops. Transportation Research Part B: Methodological, 31(1), 41-54.
Bhat, C. R. (2001). Quasi-random maximum simulated likelihood estimation of the mixed
multinomial logit model. Transportation Research Part B: Methodological, 35(7),
677-693.
Bhat, C. R. (2003). Simulation estimation of mixed discrete choice models using
randomized and scrambled Halton sequences. Transportation Research Part B:
Methodological, 37(9), 837-855.
Bhat, C. R., & Sardesai, R. (2006). The impact of stop-making and travel time reliability
on commute mode choice. Transportation Research Part B: Methodological, 40(9),
709-730.
Blincoe, K. M., Jones, A. P., Sauerzapf, V., & Haynes, R. (2006). Speeding drivers’
attitudes and perceptions of speed cameras in rural England. Accident Analysis &
Prevention, 38(2), 371-378.
Blower, D. F., Campbell, K. L., & Green, P. E. (1993). Accident rates for heavy truck-
tractors in Michigan. Accident Analysis & Prevention, 25(3), 307-321.

154
Borowsky, A., & Oron-Gilad, T. (2013). Exploring the effects of driving experience on
hazard awareness and risk perception via real-time hazard identification, hazard
classification, and rating tasks. Accident Analysis & Prevention, 59, 548-565.
Bose, D., Arregui-Dalmases, C., Sanchez-Molina, D., Velazquez-Ameijide, J., &
Crandall, J. (2013). Increased risk of driver fatality due to unrestrained rear-seat
passengers in severe frontal crashes. Accident Analysis & Prevention, 53, 100-104.
Boufous, S., & Williamson, A. (2006). Work-related traffic crashes: a record linkage
study. Accident Analysis & Prevention, 38(1), 14-21.
Boyle, L. N., & Lee, J. D. (2010). Using driving simulators to assess driving safety.
Accident Analysis & Prevention, 42(3), 785-787.
Boyle, L. N., Tippin, J., Paul, A., & Rizzo, M. (2008). Driver performance in the moments
surrounding a microsleep. Transportation Research Part F: Traffic Psychology and
Behaviour, 11(2), 126-136.
Braitman, K. A., Kirley, B. B., Ferguson, S., & Chaudhary, N. K. (2007). Factors leading
to older drivers' intersection crashes. Traffic Injury Prevention, 8(3), 267-274.
Briscoe, S. (2004). Raising the bar: can increased statutory penalties deter drink-
drivers?. Accident Analysis & Prevention, 36(5), 919-929.
Brookhuis, K. A., & De Waard, D. (1993). The use of psychophysiology to assess driver
status. Ergonomics, 36(9), 1099-1110.
Brown, I. D. (1997). Prospects for technological countermeasures against driver fatigue.
Accident Analysis & Prevention, 29(4), 525-531.
Bunn, T. L., Slavova, S., Struttmann, T. W., & Browning, S. R. (2005). Sleepiness/fatigue
and distraction/inattention as factors for fatal versus nonfatal commercial motor
vehicle driver injuries. Accident Analysis & Prevention, 37(5), 862-869.
Cameron, M. H., Newstead, S. V., Diamantopoulou, K., & Oxley, P. (2003). The
interaction between speed camera enforcement and speed-related mass media
publicity in Victoria, Australia. In Annual Proceedings/Association for the
Advancement of Automotive Medicine (Vol. 47, p. 267).
Cantin, V., Lavallière, M., Simoneau, M., & Teasdale, N. (2009). Mental workload when
driving in a simulator: Effects of age and driving complexity. Accident Analysis &
Prevention, 41(4), 763-771.
Carnis, L., & Blais, E. (2013). An assessment of the safety effects of the French speed
camera program. Accident Analysis & Prevention, 51, 301-309.
155
Census and Statistic Department of Hong Kong Special Administrative Region. (2018a,
July).Women and Men in Hong Kong - Key Statistics. Retrieved March 6, 2019, from
https://www.censtatd.gov.hk/hkstat/sub/sp180.jsp?productCode=B1130303
Census and Statistic Department of Hong Kong Special Administrative Region. (2018b,
March). Report on Annual Earnings and Hours Survey. Retrieved March 6, 2019,
from https://www.censtatd.gov.hk/hkstat/sub/sp210_tc.jsp?productCode=B1050014
Census and Statistic Department of Hong Kong Special Administrative Region. (2018c,
March). Report on Marriage and Divorce Trends in Hong Kong, 1991 to 2016.
Retrieved July 20, 2019, from
https://www.censtatd.gov.hk/hkstat/sub/sp160.jsp?productCode=FA100055
Census and Statistics Department of Hong Kong Special Administrative Region,
Demographic Statistics Section. (2017, September 8). Hong Kong Population
Projections. Retrieved April 26, 2018, from
http://www.censtatd.gov.hk/hkstat/sub/sp190.jsp?productCode=B1120015
Cestac, J., Paran, F., & Delhomme, P. (2011). Young drivers’ sensation seeking,
subjective norms, and perceived behavioral control and their roles in predicting
speeding intention: How risk-taking motivations evolve with gender and driving
experience. Safety Science, 49(3), 424-432.
Chang, X., Li, H., Qin, L., Rong, J., Lu, Y., & Chen, X. (2019). Evaluation of cooperative
systems on driver behavior in heavy fog condition based on a driving
simulator. Accident Analysis & Prevention, 128, 197-205.
Charlton, J. L., Oxley, J., Fildes, B., Oxley, P., Newstead, S., Koppel, S., & O’Hare, M.
(2006). Characteristics of older drivers who adopt self-regulatory driving
behaviours. Transportation Research Part F: Traffic Psychology and
Behaviour, 9(5), 363-373.
Chen, F., Ma, X., & Chen, S. (2014). Refined-scale panel data crash rate analysis using
random-effects tobit model. Accident Analysis & Prevention, 73, 323-332.
Chen, S. (2019b). Safety implications of roadway design and management: new evidence
and insights in the traditional and emerging (autonomous vehicle) operating
environments (Doctoral dissertation, Purdue University Graduate School).
Chen, S., Saeed, T. U., Alqadhi, S. D., & Labi, S. (2019a). Safety impacts of pavement
surface roughness at two-lane and multi-lane highways: accounting for

156
heterogeneity and seemingly unrelated correlation across crash severities.
Transportmetrica A: transport science, 15(1), 18-33.
Chen, S., Saeed, T. U., Alqadhi, S.D., & Labi, S. (2017b). Safety impacts of pavement
surface roughness at two-lane and multi-lane highways: accounting for
heterogeneity and seemingly unrelated correlation across crash severities.
Transportmetrica A: Transport Science, 15(1), 18-33.
Chen, S., Saeed, T.U., & Labi, S. (2017a). Impact of road-surface condition on rural
highway safety: A multivariate random parameters negative binomial approach.
Analytic Methods in Accident Research, 16, 75-89.
Chen, S., Saeed, T.U., Alinizzi, M., Lavrenz, S., Labi, S. (2019c). Safety sensitivity to
roadway characteristics: A comparison across highway classes. Accident Analysis &
Prevention, 123, 39-50.
Chen, T., Bai, L., & Sze, N. N. (2019b). Factors affecting the severity of rear-end conflicts:
a driving simulator study. In 2019 5th International Conference on Transportation
Information and Safety (ICTIS) (pp. 1182-1187). IEEE.
Chen, T., Sze, N. N., & Bai, L. (2019a). Safety of professional drivers in an ageing
society–A driving simulator study. Transportation Research Part F: Traffic
Psychology and Behaviour, 67, 101-112.
Chen, T., Sze, N. N., Saxena, S., Pinjari, A. R., Bhat, C. R., & Bai, L. (2020). Evaluation
of penalty and enforcement strategies to combat speeding offences among
professional drivers: a Hong Kong stated preference experiment. Accident Analysis
& Prevention, 135, 105366.
Chen, T., Sze, N.N., Chen, S., Labi, S. (2020b). Urban road space allocation incorporating
the safety and construction cost impacts of lane and footpath widths. Journal of
Safety Research, In press.
Chen, T., Sze, N.N., Saxena, S., Pinjari, A.R., Bhat, C.R., & Bai, L. (2020a). Evaluation
of penalty and enforcement strategies to combat speeding offences among
professional drivers: a Hong Kong stated preference experiment. Accident Analysis
& Prevention, 135, 105366.
Chimba, D., Sando, T., & Kwigizile, V. (2010). Effect of bus size and operation to crash
occurrences. Accident Analysis & Prevention, 42(6), 2063-2067.
Chin, H.C., & Huang, H.L. (2009). Safety assessment of taxi drivers in
Singapore. Transportation Research Record, 2114(1), 47-56.

157
Choudhary, P., & Velaga, N. R. (2017). Modelling driver distraction effects due to mobile
phone use on reaction time. Transportation Research Part C: Emerging
Technologies, 77, 351-365.
Cnossen, F., Meijman, T., & Rothengatter, T. (2004). Adaptive strategy changes as a
function of task demands: a study of car drivers. Ergonomics, 47(2), 218-236.
Comte, S. L., & Jamson, A. H. (2000). Traditional and innovative speed-reducing
measures for curves: an investigation of driver behaviour using a driving
simulator. Safety Science, 36(3), 137-150.
Cooper, P. J. (1984). Experience with traffic conflicts in Canada with emphasis on “post
encroachment time” techniques. In International calibration study of traffic conflict
techniques (pp. 75-96). Springer, Berlin, Heidelberg.
Damm, L., Nachtergaële, C., Meskali, M., & Berthelon, C. (2011). The evaluation of
traditional and early driver training with simulated accident scenarios. Human
Factors, 53(4), 323-337.
Davidse, R. J., Hagenzieker, M. P., van Wolffelaar, P. C., & Brouwer, W. H. (2009).
Effects of in-car support on mental workload and driving performance of older
drivers. Human Factors, 51(4), 463-476.
De Craen, S., Twisk, D. A., Hagenzieker, M. P., Elffers, H., & Brookhuis, K. A. (2008).
The development of a method to measure speed adaptation to traffic complexity:
Identifying novice, unsafe, and overconfident drivers. Accident Analysis &
Prevention, 40(4), 1524-1530.
De Pauw, E., Daniels, S., Brijs, T., Hermans, E., & Wets, G. (2014a). An evaluation of
the traffic safety effect of fixed speed cameras. Safety Science, 62, 168-174.
De Pauw, E., Daniels, S., Brijs, T., Hermans, E., & Wets, G. (2014b). Behavioural effects
of fixed speed cameras on motorways: Overall improved speed compliance or
kangaroo jumps?. Accident Analysis & Prevention, 73, 132-140.
De Raedt, R., & Ponjaert‐Kristoffersen, I. (2000). Can strategic and tactical compensation
reduce crash risk in older drivers?. Age and Ageing, 29(6), 517-521.
De Waard, D., & Rooijers, T. (1994). An experimental study to evaluate the effectiveness
of different methods and intensities of law enforcement on driving speed on
motorways. Accident Analysis & Prevention, 26(6), 751-765.

158
Delhomme, P., Chaurand, N., & Paran, F. (2012). Personality predictors of speeding in
young drivers: Anger vs. sensation seeking. Transportation Research Part F: Traffic
Psychology and Behaviour, 15(6), 654-666.
Desapriya, E., Subzwari, S., Sasges, D., Basic, A., Alidina, A., Turcotte, K., & Pike, I.
(2010). Do light truck vehicles (LTV) impose greater risk of pedestrian injury than
passenger cars? A meta-analysis and systematic review. Traffic injury
prevention, 11(1), 48-56.
Diakaki, C., Papageorgiou, M., Papamichail, I., & Nikolos, I. (2015). Overview and
analysis of vehicle automation and communication systems from a motorway traffic
management perspective. Transportation Research Part A: Policy and Practice, 75,
147-165.
Dinu, R. R., & Veeraragavan, A. (2011). Random parameter models for accident
prediction on two-lane undivided highways in India. Journal of safety
research, 42(1), 39-42.
Discetti, P., & Lamberti, R. (2011). Traffic sign sight distance for low-volume
roads. Transportation Research Record, 2203(1), 64-70.
Dong, C., Clarke, D.B., Yan, X., Khattak, A., & Huang, B. (2014). Multivariate random-
parameters zero-inflated negative binomial regression model: An application to
estimate crash frequencies at intersections. Accident Analysis & Prevention, 70,
320-329.
Dowling, K. W., & Holloman, E. (2008). The effects of conspicuous traffic enforcement
on speeding behaviors: A study of speed reduction response. International Social
Science Review, 83(3/4), 181-188.
Du, H., Zhao, X., Zhang, X., Zhang, Y., & Rong, J. (2015). Effects of fatigue on driving
performance under different roadway geometries: a simulator study. Traffic Injury
Prevention, 16(5), 468-473.
Duke, J., Guest, M., & Boggess, M. (2010). Age-related safety in professional heavy
vehicle drivers: A literature review. Accident Analysis & Prevention, 42(2), 364-371.
Dumbaugh, E. (2006). Design of Safe Urban Roadsides: An Empirical Analysis,
Transportation Research Record 1961, 74–82.
Efron, B. (2014). Estimation and accuracy after model selection. Journal of the American
Statistical Association, 109(507), 991-1007.
Efron, B., & Tibshirani, R. J. (1994). An introduction to the bootstrap. CRC press.

159
Elvik, R. (1997). Effects on accidents of automatic speed enforcement in
Norway. Transportation Research Record: Journal of the Transportation Research
Board, (1595), 14-19.
Elvik, R. (2019). The more (sharp) curves, the lower the risk. Accident Analysis &
Prevention, 133, 105322.
Elvik, R., & Christensen, P. (2007). The deterrent effect of increasing fixed penalties for
traffic offences: the Norwegian experience. Journal of Safety Research, 38(6), 689-
695.
Farahmand, B., & Boroujerdian, A. M. (2018). Effect of road geometry on driver fatigue
in monotonous environments: A simulator study. Transportation Research Part F:
Traffic Psychology and Behaviour, 58, 640-651.
Farrow, A., & Reynolds, F. (2012). Health and safety of the older worker. Occupational
Medicine, 62(1), 4-11.
Feng, S., Li, Z., Ci, Y., & Zhang, G. (2016). Risk factors affecting fatal bus accident
severity: Their impact on different types of bus drivers. Accident Analysis &
Prevention, 86, 29-39.
Fernandes, R., Hatfield, J., & Job, R. S. (2010). A systematic investigation of the
differential predictors for speeding, drink-driving, driving while fatigued, and not
wearing a seat belt, among young drivers. Transportation Research Part F: Traffic
Psychology and Behaviour, 13(3), 179-196.
Filtness, A. J., Reyner, L. A., & Horne, J. A. (2012). Driver sleepiness—Comparisons
between young and older men during a monotonous afternoon simulated
drive. Biological Psychology, 89(3), 580-583.
Fitzpatrick, C. D., Rakasi, S., & Knodler Jr, M. A. (2017). An investigation of the
speeding-related crash designation through crash narrative reviews sampled via
logistic regression. Accident Analysis & Prevention, 98, 57-63.
Fleiter, J. J., Lennon, A., & Watson, B. (2010). How do other people influence your
driving speed? Exploring the ‘who’and the ‘how’of social influences on speeding
from a qualitative perspective. Transportation Research Part F: Traffic Psychology
and Behaviour, 13(1), 49-62.
Friswell, R., & Williamson, A. (2013). Comparison of the fatigue experiences of short
haul light and long distance heavy vehicle drivers. Safety science, 57, 203-213.

160
Gao, K., Tu, H., Sun, L., Sze, N. N., Song, Z., & Shi, H. (2020). Impacts of reduced
visibility under hazy weather condition on collision risk and car-following behavior:
Implications for traffic control and management. International Journal of
Sustainable Transportation, 14(8), 635-642.
Gargoum, S. A., & El-Basyouny, K. (2018). Intervention analysis of the safety effects of
a legislation targeting excessive speeding in Canada. International Journal of Injury
Control and Safety Promotion, 25(2), 212-221.
Gates, T.J., & Noyce, D.A. (2010). Dilemma zone driver behavior as a function of vehicle
type, time of day, and platooning. Transportation Research Record, 2149(1), 84-93.
Gates, T.J., Noyce, D.A., Laracuente, L., & Nordheim, E.V. (2007). Analysis of dilemma
zone driver behavior at signalized intersections. Transportation Research Record,
2030, 29-39.
Gibbs, J. P. (1985). Deterrence theory and research. Nebraska Symposium on
Motivation, 33, pp. 87-130
Gitelman, V., Balasha, D., Carmel, R., Hendel, L., & Pesahov, F. (2012). Characterization
of pedestrian accidents and an examination of infrastructure measures to improve
pedestrian safety in Israel. Accident Analysis & Prevention, 44(1), 63-73.
Glendon, A. I., & Cernecca, L. (2003). Young drivers’ responses to anti-speeding and
anti-drink-driving messages. Transportation Research Part F: Traffic Psychology
and Behaviour, 6(3), 197-216.
Granié, M. A., Brenac, T., Montel, M. C., Millot, M., & Coquelet, C. (2014). Influence
of built environment on pedestrian's crossing decision. Accident Analysis &
Prevention, 67, 75-85.
Gross, F., & Jovanis, P. P. (2007). Estimation of the safety effectiveness of lane and
shoulder width: Case-control approach. Journal of Transportation
Engineering, 133(6), 362-369.
Gu, X., Yan, X., Ma, L., & Liu, X. (2020). Modeling the service-route-based crash
frequency by a spatiotemporal-random-effect zero-inflated negative binomial model:
An empirical analysis for bus-involved crashes. Accident Analysis &
Prevention, 144, 105674.
Guo, Y., Li, Z., Liu, P., & Wu, Y. (2019). Modeling correlation and heterogeneity in crash
rates by collision types using full Bayesian random parameters multivariate Tobit
model. Accident Analysis & Prevention, 128, 164-174.

161
Hajivassiliou, V. A., & Ruud, P. A. (1994). Classical estimation methods for LDV models
using simulation. Handbook of Econometrics, 4, 2383-2441.
Haque, M. M., & Washington, S. (2015). The impact of mobile phone distraction on the
braking behaviour of young drivers: a hazard-based duration model. Transportation
Research Part C: Emerging Technologies, 50, 13-27.
Haque, M. M., & Washington, S. (2014). A parametric duration model of the reaction
times of drivers distracted by mobile phone conversations. Accident Analysis &
Prevention, 62, 42-53.
Harless, D. W., & Hoffer, G. E. (2007). Do laboratory frontal crash test programs predict
driver fatality risk? Evidence from within vehicle line variation in test
ratings. Accident Analysis & Prevention, 39(5), 902-913.
Hatakka, M., Keskinen, E., Gregersen, N. P., Glad, A., & Hernetkoski, K. (2002). From
control of the vehicle to personal self-control; broadening the perspectives to driver
education. Transportation Research Part F: Traffic Psychology and Behaviour, 5(3),
201-215.
Hauer, E. (1988). Case for Science-Based Road Safety Design and Management, in
Highway Safety: At the Crossroads, Ed: R.E. Stammer, 241-267, American Society
of Civil Engineers, Reston, VA.
Hayward, J. C. (1972). Near miss determination through use of a scale of danger (traffic
records 384). Highway Research Board, Washington, DC
Health and Safety Commission. (2001). Reducing at-work road traffic incidents. UK,
London: Her Majesty’s Station.
Hingwe, P., Tan, H. S., Packard, A. K., & Tomizuka, M. (2002). Linear parameter varying
controller for automated lane guidance: experimental study on tractor-trailers. IEEE
Transactions on Control Systems Technology, 10(6), 793-806.
Hole, G., 2007. The Psychology of Driving. Lawrence Earlbaum Associates, Inc.,
Mahwah, New Jersey.
Hong Kong Planning Department (Ed.) (2016, May). Hong Kong Planning Standards
and Guidelines: Chapter 8 Internal Transport Facilities. Retrieved March 25, 2019,
from https://www.pland.gov.hk/pland_en/tech_doc/hkpsg/full/pdf/ch8.pdf
Hong Kong Police Force (2018, June). Traffic Annual Report. Retrieved June 27, 2018,
from https://www.police.gov.hk/info/doc/statistics/traffic_report_2015_en.pdf
Hong Kong Trade Development Council (2019) Title: Logistics Industry in Hong Kong.

162
Hong Kong, Retrieved May 13, 2020, from
https://hkmb.hktdc.com/en/1X0018WG/hktdc-research/Logistics-Industry-in-
Hong-Kong
Horne, J., & Reyner, L. (1999). Vehicle accidents related to sleep: a review. Occupational
and Environmental Medicine, 56(5), 289-294.
Hössinger, R., & Berger, W. J. (2012). Stated response to increased enforcement density
and penalty size for speeding and driving unbelted. Accident Analysis &
Prevention, 49, 501-511.
Høye, A. (2014). Speed cameras, section control, and kangaroo jumps–a meta-
analysis. Accident Analysis & Prevention, 73, 200-208.
Hu, L., Wu, X., Huang, J., Peng, Y., & Liu, W. (2020). Investigation of clusters and
injuries in pedestrian crashes using GIS in Changsha, China. Safety science, 127,
104710.
Huang, H., & Chin, H. C. (2009). Disaggregate propensity study on red light running
crashes using quasi-induced exposure method. Journal of Transportation
Engineering, 135(3), 104-111.
Huang, H., Siddiqui, C., & Abdel-Aty, M. (2011). Indexing crash worthiness and crash
aggressivity by vehicle type. Accident Analysis & Prevention, 43(4), 1364-1370.
Huang, H., Song, B., Xu, P., Zeng, Q., Lee, J., & Abdel-Aty, M. (2016). Macro and micro
models for zonal crash prediction with application in hot zones
identification. Journal of transport geography, 54, 248-256.
Huo, X., Leng, J., Hou, Q., Zheng, L., & Zhao, L. (2020). Assessing the explanatory and
predictive performance of a random parameters count model with heterogeneity in
means and variances. Accident Analysis & Prevention, 147, 105759.
Hydén, C. (1987). The development of a method for traffic safety evaluation: The
Swedish Traffic Conflicts Technique. Bulletin Lund Institute of Technology,
Department, (70).
Imine, H., Madani, T., & Fridman, L. (2011, December). Sliding-mode controller for
heavy vehicle lane departure avoidance. In 2011 9th IEEE International Conference
on Control and Automation (ICCA) (pp. 372-377). IEEE.
Islam, S., & Mannering, F. (2006). Driver aging and its effect on male and female single-
vehicle accident injuries: some additional evidence. Journal of Safety
Research, 37(3), 267-276.
Jacobs, B. A. (2010). Deterrence and deterrability. Criminology, 48(2), 417-441.

163
Jamson, A. H., & Merat, N. (2005). Surrogate in-vehicle information systems and driver
behaviour: Effects of visual and cognitive load in simulated rural
driving. Transportation Research Part F: Traffic Psychology and Behaviour, 8(2),
79-96.
Keall, M. D., Povey, L. J., & Frith, W. J. (2002). Further results from a trial comparing a
hidden speed camera programme with visible camera operation. Accident Analysis &
Prevention, 34(6), 773-777.
Kergoat, M., Delhomme, P., & Meyer, T. (2017). Appraisal of speed-enforcement
warning messages among young drivers: Influence of automatic versus human speed
enforcement in a known or unknown location. Transportation Research Part F:
Traffic Psychology and Behaviour, 46, pp. 177-194.
Kim, K., Brunner, I. M., & Yamashita, E. Y. (2006). Influence of land use, population,
employment, and economic activity on accidents. Transportation Research
Record, 1953(1), 56-64.
Kim, M., Kho, S. Y., & Kim, D. K. (2017). Hierarchical ordered model for injury severity
of pedestrian crashes in South Korea. Journal of Safety Research, 61, 33-40.
Knipling, R. R., P. F. Waller, R. C. Peck, R. Pfefer, T. R. Neuman, K. L. Slack, and K.
K. Hardy. (2004). NCHRP Report 500: Guidance for Implementation of the
AASHTO Strategic Highway Safety Plan; Volume 13: A Guide for Addressing Heavy
Truck Crashes. Transportation Research Board of the National Academies,
Washington, D.C.
Konduri, S., Labi, S., & Sinha, K.C. (2003). Incident Occurrence Models for Freeway
Incident Management. Transportation Research Record 1856(1), 125-135.
Kontogiannis, T. (2006). Patterns of driver stress and coping strategies in a Greek sample
and their relationship to aberrant behaviors and traffic accidents. Accident Analysis
& Prevention, 38(5), 913-924.
Labi, S. (2011). Efficacies of roadway safety improvements across functional subclasses
of rural two-lane highways. Journal of Safety Research, 42(4), 231-239.
Labi, S., Chen, S., Preckel, P. V., Qiao, Y., & Woldemariam, W. (2017). Rural two-lane
highway shoulder and lane width policy evaluation using multiobjective
optimization. Transportmetrica A: Transport Science, 13(7), 631-656.
Lamptey, G. (2004). Development of a Safety Management Systems for Indiana, MS
Thesis, Purdue University, W. Lafayette, Indiana, USA.
164
Langford, J., Methorst, R., & Hakamies-Blomqvist, L. (2006). Older drivers do not have
a high crash risk—A replication of low mileage bias. Accident Analysis &
Prevention, 38(3), 574-578.
Langlais, E. (2008). Detection avoidance and deterrence: some paradoxical
arithmetic. Journal of Public Economic Theory, 10(3), 371-382.
Lavieri, P. S., & Bhat, C. R. (2019). Modeling Individuals’ Willingness to Share Trips
with Strangers in an Autonomous Vehicle Future (No. 19-01775).
Lawpoolsri, S., Li, J., & Braver, E. R. (2007). Do speeding tickets reduce the likelihood
of receiving subsequent speeding tickets? A longitudinal study of speeding violators
in Maryland. Traffic Injury Prevention, 8(1), 26-34.
Lee, H. C., Cameron, D., & Lee, A. H. (2003). Assessing the driving performance of older
adult drivers: on-road versus simulated driving. Accident Analysis & Prevention,
35(5), 797-803.
Lee, J., Abdel-Aty, M., & Jiang, X. (2015). Multivariate crash modeling for motor vehicle
and non-motorized modes at the macroscopic level. Accident Analysis &
Prevention, 78, 146-154.
Lee, R. D., & Carter, L. R. (1992). Modeling and forecasting US mortality. Journal of the
American Statistical Association, 87(419), 659-671.
Lee, Y.C. (2018) Average age of occupational drivers reached sixty: Road accident and
aging population. Hong Kong 01 (28 January 2018, Chinese only). www.hk01.com
Last accessed 3 February 2020.
Legislative Council of Hong Kong Special Administrative Region. (2018, June).
Measures managing long working hours and occupational fatigue of bus drivers
(ISE07/17-18). Retrieved July 20, 2019, from https://www.legco.gov.hk/research-
publications/english/essentials-1718ise07-measures-managing-long-working-hours-
and-occupational-fatigue-of-bus-drivers.htm
Li, M. K., Yu, J. J., Ma, L., & Zhang, W. (2019). Modeling and mitigating fatigue-related
accident risk of taxi drivers. Accident Analysis & Prevention, 123, 79-87.
Li, X., Li, X., Xiao, Y., & Jia, B. (2016). Modeling mechanical restriction differences
between car and heavy truck in two-lane cellular automata traffic flow model.
Physica A: Statistical Mechanics and its Applications, 451, 49-62.

165
Li, X., Yan, X., & Wong, S. C. (2015). Effects of fog, driver experience and gender on
driving behavior on S-curved road segments. Accident Analysis & Prevention, 77,
91-104.
Li, Y. C., Sze, N. N., Wong, S. C., Yan, W., Tsui, K. L., & So, F. L. (2016). A simulation
study of the effects of alcohol on driving performance in a Chinese
population. Accident Analysis & Prevention, 95, 334-342.
Li, Y. C., Sze, N.N., & Wong, S.C. (2014). Effective measures for combating drink-
driving offenses: an attitudinal model for Hong Kong. Transportmetrica A: Transport
Science 10.8 (2014): 722-739.
Li, Z., Wang, W., Liu, P., Bai, L., & Du, M. (2015). Analysis of crash risks by collision
type at freeway diverge area using multivariate modeling technique. Journal of
Transportation Engineering, 141(6), 04015002.
Lord, D., & Mannering, F. (2010). The statistical analysis of crash-frequency data: a
review and assessment of methodological alternatives. Transportation research part
A: policy and practice, 44(5), 291-305.
Lord, D., Washington, S. P., & Ivan, J. N. (2005). Poisson, Poisson-gamma and zero-
inflated regression models of motor vehicle crashes: balancing statistical fit and
theory. Accident Analysis & Prevention, 37(1), 35-46.
Lord, D., Washington, S., & Ivan, J. N. (2007). Further notes on the application of zero-
inflated models in highway safety. Accident Analysis & Prevention, 39(1), 53-57.
Lu, G., Liu, M., Wang, Y., & Yu, G. (2012). Quantifying the severity of traffic conflict
by assuming moving elements as rectangles at intersection. Procedia-Social and
Behavioral Sciences, 43, 255-264.
Lundberg, C., Hakamies-Blomqvist, L., Almkvist, O., & Johansson, K. (1998).
Impairments of some cognitive functions are common in crash-involved older
drivers. Accident Analysis & Prevention, 30(3), 371-377.
Lyman, J. M., McGwin Jr, G., & Sims, R. V. (2001). Factors related to driving difficulty
and habits in older drivers. Accident Analysis & Prevention, 33(3), 413-421.
Machin, M. A., & De Souza, J. M. (2004). Predicting health outcomes and safety
behaviour in taxi drivers. Transportation Research Part F: Traffic Psychology and
Behaviour, 7(4-5), 257-270.
Maddala, G. S. (1986). Limited-dependent and qualitative variables in
econometrics (No.3). Cambridge University Press.

166
Makinen T.E. (2001) Halo effect of automatic speed enforcement. Techn. Res. Centre
Finland, pp. 341-345
Mallia, L., Lazuras, L., Violani, C., & Lucidi, F. (2015). Crash risk and aberrant driving
behaviors among bus drivers: the role of personality and attitudes towards traffic
safety. Accident Analysis & Prevention, 79, 145-151.
Mannering, F. (2018). Temporal instability and the analysis of highway accident
data. Analytic Methods in Accident Research, 17, 1-13.
Mannering, F. L., & Bhat, C. R. (2014). Analytic methods in accident research:
Methodological frontier and future directions. Analytic Methods in Accident
Research, 1, 1-22.
Mannering, F. L., Shankar, V., & Bhat, C. R. (2016). Unobserved heterogeneity and the
statistical analysis of highway accident data. Analytic Methods in Accident
Research, 11, 1-16.
Marciano, H., & Norman, J. (2015). Overt vs. covert speed cameras in combination with
delayed vs. immediate feedback to the offender. Accident Analysis & Prevention, 79,
231-240.
Martchouk, M., Mannering, F., & Bullock, D. (2010). Analysis of freeway travel time
variability using Bluetooth detection. Journal of Transportation
Engineering, 137(10), 697-704.
Martin, A. (2006). Factors influencing pedestrian safety: a literature review (No. PPR241).
Wokingham, Berks: TRL Limited.
Martin, J. L. (2002). Relationship between crash rate and hourly traffic flow on interurban
motorways. Accident Analysis & Prevention, 34(5), 619-629.
Matthews, G., Tsuda, A., Xin, G. U., & Ozeki, Y. (1999). Individual differences in driver
stress vulnerability in a Japanese sample. Ergonomics, 42(3), 401-415.
Maycock, G. (1996). Sleepiness and driving: the experience of UK car drivers. Journal
of Sleep Research, 5(4), 229-231.
McFadden, D. (1978). Modeling the choice of residential location. Transportation
Research Record, (673).
McFadden, D., & Train, K. (2000). Mixed MNL models for discrete response. Journal of
Applied Econometrics, 15(5), 447-470.
Mehdizadeh, M., Shariat-Mohaymany, A., & Nordfjaern, T. (2018). Accident
involvement among Iranian lorry drivers: Direct and indirect effects of background

167
variables and aberrant driving behaviour. Transportation Research Part F: Traffic
Psychology and Behaviour, 58, 39-55.
Meng, F., Li, S., Cao, L., Li, M., Peng, Q., Wang, C., & Zhang, W. (2015). Driving fatigue
in professional drivers: a survey of truck and taxi drivers. Traffic Injury
Prevention, 16(5), 474-483.
Meng, F., Wong, S. C., Yan, W., Li, Y. C., & Yang, L. (2019). Temporal patterns of driving
fatigue and driving performance among male taxi drivers in Hong Kong: A driving
simulator approach. Accident Analysis & Prevention, 125, 7-13.
Meng, F., Xu, P., Wong, S. C., Huang, H., & Li, Y. C. (2017). Occupant-level injury
severity analyses for taxis in Hong Kong: A Bayesian space-time logistic model.
Accident Analysis & Prevention, 108, 297-307.
Merat, N., Anttila, V., & Luoma, J. (2005). Comparing the driving performance of
average and older drivers: The effect of surrogate in-vehicle information systems.
Transportation Research Part F: Traffic Psychology and Behaviour, 8(2), 147-166.
Minderhoud, M. M., & Bovy, P. H. (2001). Extended time-to-collision measures for road
traffic safety assessment. Accident Analysis & Prevention, 33(1), 89-97.
Mohamed, M. G., Saunier, N., Miranda-Moreno, L. F., & Ukkusuri, S. V. (2013). A
clustering regression approach: A comprehensive injury severity analysis of
pedestrian–vehicle crashes in New York, US and Montreal, Canada. Safety
Science, 54, 27-37.
Mollenhauer, M. A., Lee, J., Cho, K., Hulse, M. C., & Dingus, T. A. (1994, October).
The effects of sensory modality and information priority on in-vehicle signing and
information systems. In Proceedings of the Human Factors and Ergonomics
Society Annual Meeting (Vol. 38, No. 16, pp. 1072-1076). Sage CA: Los Angeles,
CA: SAGE Publications.
Molnar, L. J., & Eby, D. W. (2008). The relationship between self-regulation and driving-
related abilities in older drivers: an exploratory study. Traffic Injury Prevention, 9(4),
314-319.
Mooren, L., Grzebieta, R., Williamson, A., Olivier, J., & Friswell, R. (2014). Safety
management for heavy vehicle transport: A review of the literature. Safety
Science, 62, 79-89.
Navarro, J. E. J. B., Sanz, J. L. G., Del Castillo, J. M., Izquierdo, A. C., & Rodríguez, M.
M. (2007). Motivational factors and physician advice for physical activity in older

168
urban adults. Journal of Aging and Physical Activity, 15(3), 241-256.
Netto, M. S., Chaib, S., & Mammar, S. (2004, June). Lateral adaptive control for vehicle
lane keeping. In Proceedings of the 2004 American Control Conference (Vol. 3, pp.
2693-2698). IEEE.
Newnam, S., Blower, D., Molnar, L., Eby, D., & Koppel, S. (2018). Exploring crash
characteristics and injury outcomes among older truck drivers: an analysis of truck-
involved crash data in the United States. Safety Science, 106, 140-145.
Newnam, S., Koppel, S., Molnar, L. J., Zakrajsek, J. S., Eby, D. W., & Blower, D. (2019).
Older truck drivers: How can we keep them in the workforce for as long as safely
possible?. Safety Science, in press.
Newnam, S., Watson, B., & Murray, W. (2004). Factors predicting intentions to speed in
a work and personal vehicle. Transportation Research Part F: Traffic Psychology and
Behaviour, 7(4-5), 287-300.
Neyens, D. M., & Boyle, L. N. (2007). The effect of distractions on the crash types of
teenage drivers. Accident Analysis & Prevention, 39(1), 206-212.
Ng, A. W., & Chan, A. H. (2008). The effects of driver factors and sign design features
on the comprehensibility of traffic signs. Journal of Safety Research, 39(3), 321-328.
Nguyen-Phuoc, D. Q., De Gruyter, C., Nguyen, H. A., Nguyen, T., & Su, D. N. (2020).
Risky behaviours associated with traffic crashes among app-based motorcycle taxi
drivers in Vietnam. Transportation Research Part F: Traffic Psychology and
Behaviour, 70, 249-259.
Ni, R., Kang, J. J., & Andersen, G. J. (2010). Age-related declines in car following
performance under simulated fog conditions. Accident Analysis & Prevention, 42(3),
818-826.
Noland, R. B., & Quddus, M. A. (2004). A spatially disaggregate analysis of road
casualties in England. Accident Analysis & Prevention, 36(6), 973-984.
Oron-Gilad, T., & Ronen, A. (2007). Road characteristics and driver fatigue: a simulator
study. Traffic Injury Prevention, 8(3), 281-289.
Oron-Gilad, T., Ronen, A., & Shinar, D. (2008). Alertness maintaining tasks (AMTs)
while driving. Accident Analysis & Prevention, 40(3), 851-860.
Otmani, S., Rogé, J., & Muzet, A. (2005). Sleepiness in professional drivers: effect of age
and time of day. Accident Analysis & Prevention, 37(5), 930-937.

169
Öz, B., Özkan, T., & Lajunen, T. (2010a). Professional and non-professional drivers’
stress reactions and risky driving. Transportation Research Part F: Traffic
Psychology and Behaviour, 13(1), 32-40.
Öz, B., Özkan, T., & Lajunen, T. (2010b). An investigation of the relationship between
organizational climate and professional drivers’ driver behaviours. Safety
Science, 48(10), 1484-1489.
Öz, B., Özkan, T., & Lajunen, T. (2013). An investigation of professional drivers:
Organizational safety climate, driver behaviours and performance. Transportation
Research Part F: Traffic Psychology and Behaviour, 16, 81-91.
Paleti, R., Eluru, N., & Bhat, C. R. (2010). Examining the influence of aggressive driving
behavior on driver injury severity in traffic crashes. Accident Analysis & Prevention,
42(6), 1839-1854.
Park, E. S., Carlson, P. J., Porter, R. J., & Andersen, C. K. (2012). Safety effects of wider
edge lines on rural, two-lane highways. Accident Analysis & Prevention, 48, 317-
325.
Peer, E. (2010). Speeding and the time-saving bias: How drivers’ estimations of time
saved in higher speed affects their choice of speed. Accident Analysis &
Prevention, 42(6), 1978-1982.
Pei, X., Sze, N. N., Wong, S. C., & Yao, D. (2016). Bootstrap resampling approach to
disaggregate analysis of road crashes in Hong Kong. Accident Analysis &
Prevention, 95, 512-520.
Pei, X., Wong, S. C., & Sze, N. N. (2012). The roles of exposure and speed in road safety
analysis. Accident Analysis & Prevention, 48, 464-471.
Poulter, D. R., Chapman, P., Bibby, P. A., Clarke, D. D., & Crundall, D. (2008). An
application of the theory of planned behaviour to truck driving behaviour and
compliance with regulations. Accident Analysis & Prevention, 40(6), 2058-2064.
Qin, X., Ivan, J. N., & Ravishanker, N. (2004). Selecting exposure measures in crash rate
prediction for two-lane highway segments. Accident Analysis & Prevention, 36(2),
183-191.
Raihan, M. A., Alluri, P., Wu, W., & Gan, A. (2019). Estimation of bicycle crash
modification factors (CMFs) on urban facilities using zero inflated negative
binomial models. Accident Analysis & Prevention, 123, 303-313.

170
Ram, T., & Chand, K. (2016). Effect of drivers’ risk perception and perception of driving
tasks on road safety attitude. Transportation Research Part F: Traffic Psychology and
Behaviour, 42, 162-176.
Retting, R. A., Farmer, C. M., & McCartt, A. T. (2008). Evaluation of automated speed
enforcement in Montgomery County, Maryland. Traffic Injury Prevention, 9(5), 440-
445.
Retting, R. A., Ulmer, R. G., & Williams, A. F. (1999). Prevalence and characteristics of
red light running crashes in the United States. Accident Analysis & Prevention, 31(6),
687-694.
Ritchey, M., & Nicholson‐Crotty, S. (2011). Deterrence theory and the implementation
of speed limits in the American states. Policy Studies Journal, 39(2), 329-346.
Rogers, R. W. (1983). Cognitive and psychological processes in fear appeals and attitude
change: A revised theory of protection motivation. Social Psychophysiology: A
sourcebook, 153-176.
Rohani, M. M., Wijeyesekera, D. C., & Karim, A. T. A. (2013). Bus operation, quality
service and the role of bus provider and driver. Procedia Engineering, 53, 167-178.
Roncek, D. W. (1992). Learning more from tobit coefficients: Extending a comparative
analysis of political protest. American Sociological Review, 503-507.
Rosenbloom, T. (2003). Risk evaluation and risky behavior of high and low sensation
seekers. Social Behavior and Personality: An International Journal, 31(4), 375-386.
Rosenbloom, T. (2011). Professional drivers. In Handbook of traffic psychology (pp. 389-
399). Academic Press.
Rosenbloom, T., & Shahar, A. (2007). Differences between taxi and nonprofessional
male drivers in attitudes towards traffic-violation penalties. Transportation Research
Part F: Traffic Psychology and Behaviour, 10(5), 428-435.
Rosenbloom, T., Shahar, A., Elharar, A., & Danino, O. (2008). Risk perception of driving
as a function of advanced training aimed at recognizing and handling risks in
demanding driving situations. Accident Analysis & Prevention, 40(2), 697-703.
Ryeng, E. O. (2012). The effect of sanctions and police enforcement on drivers’ choice
of speed. Accident Analysis & Prevention, 45, 446-454.
Sagberg, F., & Ingebrigtsen, R. (2018). Effects of a penalty point system on traffic
violations. Accident Analysis & Prevention, 110, 71-77.

171
Saifizul, A. A., Yamanaka, H., & Karim, M. R. (2011). Empirical analysis of gross vehicle
weight and free flow speed and consideration on its relation with differential speed
limit. Accident Analysis & Prevention, 43(3), 1068-1073.
Savolainen, P., & Mannering, F. (2007). Probabilistic models of motorcyclists’ injury
severities in single-and multi-vehicle crashes. Accident Analysis & Prevention, 39(5),
955-963.
Sayed, T., Zaki, M. H., & Autey, J. (2013). Automated safety diagnosis of vehicle–bicycle
interactions using computer vision analysis. Safety Science, 59, 163-172.
Shackel, S. C., & Parkin, J. (2014). Influence of road markings, lane widths and driver
behaviour on proximity and speed of vehicles overtaking cyclists. Accident Analysis
& Prevention, 73, 100-108.
Shaheed, M. S., & Gkritza, K. (2014). A latent class analysis of single-vehicle motorcycle
crash severity outcomes. Analytic Methods in Accident Research, 2, 30-38.
Shams, M., Shojaeizadeh, D., Majdzadeh, R., Rashidian, A., & Montazeri, A. (2011).
Taxi drivers’ views on risky driving behavior in Tehran: a qualitative study using a
social marketing approach. Accident Analysis & Prevention, 43(3), 646-651.
Shankar, V. N., Ulfarsson, G. F., Pendyala, R. M., & Nebergall, M. B. (2003). Modeling
crashes involving pedestrians and motorized traffic. Safety Science, 41(7), 627-640.
Shanmugaratnam, S., Kass, S. J., & Arruda, J. E. (2010). Age differences in cognitive and
psychomotor abilities and simulated driving. Accident Analysis & Prevention, 42(3),
802-808.
Shinar, D., Schechtman, E., & Compton, R. (2001). Self-reports of safe driving behaviors
in relationship to sex, age, education and income in the US adult driving
population. Accident Analysis & Prevention, 33(1), 111-116.
Shinar, D., Tractinsky, N., & Compton, R. (2005). Effects of practice, age, and task
demands, on interference from a phone task while driving. Accident Analysis &
Prevention, 37(2), 315-326.
Silcock, D., Smith, K., Knox, D., & Beuret, K. (2000). What limits speed. Factors That
Affect How Fast We Drive, Final Report: AA Foundation for Road Safety Research.
Spiegelhalter, D. J., Best, N. G., Carlin, B. P., & Van Der Linde, A. (2002). Bayesian
measures of model complexity and fit. Journal of the Royal Statistical Society:
Series b (Statistical Methodology), 64(4), 583-639.
Spiegelhalter, D., Thomas, A., Best, N., Lunn, D., (2005). WinBUGS User Manual. MRC

172
Biostatistics Unit, Cambridge, United Kingdom.
Srinivas, C., Dinu, R. R., & Veeraragavan, A. (2007). Application of Poisson and negative
binomial regression for modeling road accidents under mixed traffic conditions.
In Proceedings of the 86th Annual Meeting of the Transportation Research Board,
Washington, DC.
Sullman, M. J., Meadows, M. L., & Pajo, K. B. (2002). Aberrant driving behaviours
amongst New Zealand truck drivers. Transportation Research Part F: Traffic
Psychology and Behaviour, 5(3), 217-232.
Summala, H., Lamble, D., & Laakso, M. (1998). Driving experience and perception of
the lead car's braking when looking at in-car targets. Accident Analysis &
Prevention, 30(4), 401-407.
Sze, N. N., & Wong, S. C. (2007). Diagnostic analysis of the logistic model for pedestrian
injury severity in traffic crashes. Accident Analysis & Prevention, 39(6), 1267-1278.
Sze, N.N., & Christensen, K.M. (2017) Access to urban transportation system for
individuals with disabilities. International Association of Traffic and Safety Sciences
(IATSS) Research, 41(2), 66-73.
Sze, N.N., Su, J., & Bai, L. (2019) Exposure to pedestrian crash based on household
survey data: Effect of trip purpose. Accident Analysis and Prevention 128, 17-24.
Szeto, W. Y., Wong, R. C. P., Wong, S. C., & Yang, H. (2013). A time-dependent logit-
based taxi customer-search model. International Journal of Urban Sciences, 17(2),
184-198.
Tang, Z., Chen, S., Cheng, J., Ghahari, S. A., & Labi, S. (2018). Highway design and
safety consequences: A case study of interstate highway vertical grades. Journal of
Advanced Transportation, 2018. Article ID 1492614
Tarko, A. P. (2009). Modeling drivers’ speed selection as a trade-off behavior. Accident
Analysis & Prevention, 41(3), 608-616.
Tarko, A. P. (2012). Use of crash surrogates and exceedance statistics to estimate road
safety. Accident Analysis & Prevention, 45, 230-240.
Tay, R. (2003). Marginal effects of changing the vehicle mix on fatal crashes. Journal of
Transport Economics and Policy (JTEP), 37(3), 439-450.
Tay, R. (2005a). Drink driving enforcement and publicity campaigns: are the policy
recommendations sensitive to model specification?. Accident Analysis &
Prevention, 37(2), 259-266.
173
Tay, R. (2005b). The effectiveness of enforcement and publicity campaigns on serious
crashes involving young male drivers: Are drink driving and speeding
similar?. Accident Analysis & Prevention, 37(5), 922-929.
Tay, R. (2005c). General and specific deterrent effects of traffic enforcement: do we have
to catch offenders to reduce crashes?. Journal of Transport Economics and Policy
(JTEP), 39(2), 209-224.
Tay, R. (2006). Ageing drivers: Storm in a teacup?. Accident Analysis & Prevention, 38(1),
112-121.
Tay, R. (2008). Marginal effect of increasing ageing drivers on injury crashes. Accident
Analysis & Prevention, 40(6), 2065-2068.
Tay, R. (2009). The effectiveness of automated and manned traffic
enforcement. International Journal of Sustainable Transportation, 3(3), 178-186.
Tay, R., & Choi, J. (2016). Factors associated with crashes involving taxi owners and non-
owners: A case of moral hazard and adverse selection?. Accident Analysis &
Prevention, 87, 78-82.
Teh, E., Jamson, S., Carsten, O., & Jamson, H. (2014). Temporal fluctuations in driving
demand: The effect of traffic complexity on subjective measures of workload and
driving performance. Transportation Research Part F: Traffic Psychology and
Behaviour, 22, 207-217.
Thiffault, P., & Bergeron, J. (2003). Monotony of road environment and driver fatigue: a
simulator study. Accident Analysis & Prevention, 35(3), 381-391.
Ting, P. H., Hwang, J. R., Doong, J. L., & Jeng, M. C. (2008). Driver fatigue and highway
driving: A simulator study. Transportation Research Part F: Traffic Psychology &
Behavior, 94(3), 448-453.
Tobin, J. (1958). Estimation of relationships for limited dependent
variables. Econometrica: journal of the Econometric Society, 24-36.
Transport and Housing Bureau (2017) Title: Public Transport Strategy Study. Hong
Kong. http://www.td.gov.hk/filemanager/en/publication/ptss_final_report_eng.pdf
Transport Department of Hong Kong Special Administrative Region (2014). Travel
Characteristics Survey 2011 - Final Report. Hong Kong, p.14. Retrieved July 20,
2019, from https://www.td.gov.hk/filemanager/en/content_4652/tcs2011_eng.pdf
174
Transport Department of Hong Kong Special Administrative Region. (2017a, January).
Road Traffic Accident Statistics. Retrieved June 27, 2018, from
http://www.td.gov.hk/tc/road_safety/road_traffic_accident_statistics/index.html
Transport Department of Hong Kong Special Administrative Region. (2017b, January).
Red Light Cameras and Speed Enforcement Cameras. Retrieved September 10, 2020,
from
https://www.td.gov.hk/en/transport_in_hong_kong/its/its_achievements/red_light_
cameras_and_speed_enforcement_cameras/index.html
Transport Department of Hong Kong Special Administrative Region. (2018b, January).
Road Traffic Accident Statistics. Retrieved November 16, 2019, from
http://www.td.gov.hk/tc/road_safety/road_traffic_accident_statistics/index.html
Transport Department of Hong Kong Special Administrative Region. (2018a, February).
Driving-offence points system. Retrieved June 27, 2018, from
http://www.td.gov.hk/en/road_safety/safe_motoring_guides/driving_offence_points
_system/index.html
Transport Department of Hong Kong Special Administrative Region. (2019, January).
Road Traffic Accident Statistics. Retrieved September 10, 2020, from
http://www.td.gov.hk/tc/road_safety/road_traffic_accident_statistics/index.html
Transport Department of Hong Kong Special Administrative Region. (2020a, May).
Commercial Vehicles. Chapter 374A, construction and maintenance of vehicles,
Retrieved September 1, 2020, from
https://www.td.gov.hk/tc/road_safety/road_users_code/index/chapter_6_for_profes
sional_drivers/commercial_vehicles_/index.html
Transport Department of Hong Kong Special Administrative Region. (2020b, February).
Area Traffic Control Systems, Retrieved October 15, 2020, from
https://www.td.gov.hk/en/transport_in_hong_kong/its/its_achievements/area_traffi
c_control_systems/index.html
Trick, L. M., Toxopeus, R., & Wilson, D. (2010). The effects of visibility conditions,
traffic density, and navigational challenge on speed compensation and driving
performance in older adults. Accident Analysis & Prevention, 42(6), 1661-1671.
Tronsmoen, T. (2010). Associations between driver training, determinants of risky
driving behaviour and crash involvement. Safety Science, 48(1), 35-45.
175
Truelove, V., Freeman, J., Szogi, E., Kaye, S., Davey, J., & Armstrong, K. (2017).
Beyond the threat of legal sanctions: What deters speeding
behaviours?. Transportation Research Part F: Traffic Psychology and Behaviour, 50,
128-136.
Tseng, C. M. (2013). Speeding violations related to a driver’s social-economic
demographics and the most frequent driving purpose in Taiwan’s male
population. Safety Science, 57, 236-242.
Tsui, K. L., So, F. L., Sze, N. N., Wong, S. C., & Leung, T. F. (2009). Misclassification
of injury severity among road casualties in police reports. Accident Analysis &
Prevention, 41(1), 84-89.
Tulu, G. S., Washington, S., Haque, M. M., & King, M. J. (2015). Investigation of
pedestrian crashes on two-way two-lane rural roads in Ethiopia. Accident Analysis
& Prevention, 78, 118-126.
Tulu, G. S., Washington, S., King, M. J., & Haque, M. (2013). Why are pedestrian crashes
so different in developing countries? A review of relevant factors in relation to their
impact in Ethiopia. In 36th Australasian Transport Research Forum (ATRF):
Transport and the New World City, 2-4 October 2013, QUT Gardens Point, Brisbane,
Australia.
UK Sentencing Council (2017, April). Road Traffic Regulation Act 1984, s.89(1).
Retrieved March 6, 2019, from
https://www.sentencingcouncil.org.uk/offences/magistrates-court/item/speeding-
revised-2017/
Ukkusuri, S., Miranda-Moreno, L. F., Ramadurai, G., & Isa-Tavarez, J. (2012). The role
of built environment on pedestrian crash frequency. Safety Science, 50(4), 1141-
1151.
Ulak, M. B., Ozguven, E. E., Vanli, O. A., Dulebenets, M. A., & Spainhour, L. (2018).
Multivariate random parameter Tobit modeling of crashes involving aging drivers,
passengers, bicyclists, and pedestrians: Spatiotemporal variations. Accident Analysis
& Prevention, 121, 1-13.
Ulfarsson, G. F., & Mannering, F. L. (2004). Differences in male and female injury
severities in sport-utility vehicle, minivan, pickup and passenger car
accidents. Accident Analysis & Prevention, 36(2), 135-147.

176
United States Department of labor, (2018, May). Quick Facts: Taxi Drivers, Ride-Hailing
Drivers, and Chauffeurs. Retrieved March 6, 2019, from
https://www.bls.gov/ooh/transportation-and-material-moving/taxi-drivers-and-
chauffeurs.htm
Van der Hulst, M., Meijman, T., & Rothengatter, T. (2001). Maintaining task set under
fatigue: a study of time-on-task effects in simulated driving. Transportation
Research Part F: Traffic Psychology and Behaviour, 4(2), 103-118.
Vogel, K. (2003). A comparison of headway and time to collision as safety
indicators. Accident Analysis & Prevention, 35(3), 427-433.
Washington, S., Karlaftis, M. G., Mannering, F., & Anastasopoulos, P. (2020). Statistical
and Econometric Methods for Transportation Data Analysis. CRC press.
Walter, L., Broughton, J., & Knowles, J. (2011). The effects of increased police
enforcement along a route in London. Accident Analysis & Prevention, 43(3), 1219-
1227.
Wang, K., Ivan, J. N., Ravishanker, N., & Jackson, E. (2017). Multivariate poisson
lognormal modeling of crashes by type and severity on rural two lane
highways. Accident Analysis & Prevention, 99, 6-19.
Wang, Q., Fan, Z., Gui, L., Chen, Z., & Song, H. (2004). Crashworthiness analysis of a
minibus body in white through reverse engineering. Tsinghua Science and
Technology, 9(3), 338-344.
Wang, Y., Li, L., & Prato, C.G. (2019a). The relation between working conditions,
aberrant driving behaviour and crash propensity among taxi drivers in
China. Accident Analysis & Prevention, 126, 17-24.
Wang, Y., Zhang, Y., Li, L., & Liang, G. (2019b). Self-reports of workloads and aberrant
driving behaviors as predictors of crash rate among taxi drivers: A cross-sectional
study in China. Traffic Injury Prevention, 20(7), 738-743.
Watson, B., Watson, A., Siskind, V., Fleiter, J., & Soole, D. (2015). Profiling high-range
speeding offenders: Investigating criminal history, personal characteristics, traffic
offences, and crash history. Accident Analysis & Prevention, 74, 87-96.
Wen, H., Sun, J., Zeng, Q., Zhang, X., & Yuan, Q. (2018). The effects of traffic
composition on freeway crash frequency by injury severity: A Bayesian multivariate
spatial modeling approach. Journal of Advanced Transportation, 2018.

177
Wen, H., Zhang, X., Zeng, Q., & Sze, N. N. (2019). Bayesian spatial-temporal model for
the main and interaction effects of roadway and weather characteristics on freeway
crash incidence. Accident Analysis & Prevention, 132, 105249.
Westerman, S. J., & Haigney, D. (2000). Individual differences in driver stress, error and
violation. Personality and Individual Differences, 29(5), 981-998.
WHO. (2018, February). Road traffic injuries. Retrieved June 27, 2018, from
http://www.who.int/mediacentre/factsheets/fs358/en/
Williamson, A. M., Feyer, A. -M., Friswell, R., & Finlay-Brown, S., (2002). Driver
Fatigue: A survey of long distance heavy vehicle drivers in Australia. Australian
Transport Safety Bureau report, CR198.
Williamson, A., & Boufous, S. (2007). A data-matching study of the role of fatigue in
work-related crashes. Transportation Research Part F: Traffic Psychology and
Behaviour, 10(3), 242-253.
Williamson, A., Friswell, R., Olivier, J., & Grzebieta, R. (2014). Are drivers aware of
sleepiness and increasing crash risk while driving?. Accident Analysis & Prevention,
70, 225-234.
Wong, S C., Wong, C. W., & Sze, N.N. (2008). Attitudes of public light bus drivers to
penalties to combat red light violations in Hong Kong. Transport Policy, 15(1), 43-
54.
Wong, S. C., Sze, N. N., & Li, Y. C. (2007). Contributory factors to traffic crashes at
signalized intersections in Hong Kong. Accident Analysis & Prevention, 39(6),
1107-1113.
Wu, H., Han, Z., Murphy, M. R., & Zhang, Z. (2015). Empirical Bayes before–after study
on safety effect of narrow pavement widening projects in Texas. Transportation
Research Record, 2515(1), 63-69.
Wu, J., Yan, X., & Radwan, E. (2016). Discrepancy analysis of driving performance of
taxi drivers and non-professional drivers for red-light running violation and crash
avoidance at intersections. Accident Analysis & Prevention, 91, 1-9.
Xie, Y., Zhao, K., & Huynh, N. (2012). Analysis of driver injury severity in rural single-
vehicle crashes. Accident Analysis & Prevention, 47, 36-44.
Xing, F., Huang, H., Zhan, Z.Y., Zhai, X., Ou, C., Sze, N.N., & Hon, K.K. (2019) Hourly
associations between weather factors and traffic crashes: non-linear and lag effects.
Analytic Methods in Accident Research. 24, 100109.

178
Xu, C. C., Liu, P., Wang, W., Jiang, X., & Chen, Y. G. (2014). Effects of behavioral
characteristics of taxi drivers on safety and capacity of signalized
intersections. Journal of Central South University, 21(10), 4033-4042.
Xu, X., Wong, S.C., & Choi, K. (2014). A two-stage bivariate logistic-Tobit model for
the safety analysis of signalized intersections. Analytic Methods in Accident
Research, 3, 1-10.
Yan, X., & Radwan, E. (2006). Analyses of rear-end crashes based on classification tree
models. Traffic Injury Prevention, 7(3), 276-282.
Yan, X., Abdel-Aty, M., Radwan, E., Wang, X., & Chilakapati, P. (2008). Validating a
driving simulator using surrogate safety measures. Accident Analysis & Prevention,
40(1), 274-288.
Yan, X., Radwan, E., & Abdel-Aty, M. (2005). Characteristics of rear-end accidents at
signalized intersections using multiple logistic regression model. Accident Analysis
& Prevention, 37(6), 983-995.
Yau, K. K. (2004). Risk factors affecting the severity of single vehicle traffic accidents in
Hong Kong. Accident Analysis & Prevention, 36(3), 333-340.
Zegeer, C.V., Reinfurt, D.W., Hummer, J., Herf, L., Hunter W. (1988). Effects of Cross-
section design for two-lane roads, Transportation Research Record 1195, 20-32.
Zeng, Q., & Huang, H. (2014). Bayesian spatial joint modeling of traffic crashes on an
urban road network. Accident Analysis & Prevention, 67, 105-112.
Zeng, Q., Guo, Q., Wong, S. C., Wen, H., Huang, H., & Pei, X. (2019). Jointly modeling
area-level crash rates by severity: a Bayesian multivariate random-parameters
spatio-temporal Tobit regression. Transportmetrica A: Transport Science, 15(2),
1867-1884.
Zeng, Q., Huang, H., Pei, X., & Wong, S. C. (2016). Modeling nonlinear relationship
between crash frequency by severity and contributing factors by neural
networks. Analytic Methods in Accident Research, 10, 12-25.
Zeng, Q., Wen, H., Huang, H., & Abdel-Aty, M. (2017a). A Bayesian spatial random
parameters Tobit model for analyzing crash rates on roadway segments. Accident
Analysis & Prevention, 100, 37-43.
Zeng, Q., Wen, H., Huang, H., Pei, X., & Wong, S. C. (2017b). A multivariate random-
parameters Tobit model for analyzing highway crash rates by injury
severity. Accident Analysis & Prevention, 99, 184-191.

179
Zeng, Q., Wen, H., Huang, H., Pei, X., & Wong, S. C. (2018). Incorporating temporal
correlation into a multivariate random parameters Tobit model for modeling crash
rate by injury severity. Transportmetrica A: Transport Science, 14(3), 177-191.
Zhai, X., Huang, H., Sze, N.N., Song, Z., & Hon, K.K. (2019). Diagnostic analysis of the
effects of weather condition on pedestrian crash severity. Accident Analysis &
Prevention, 122, 318-324.
Zhang, G., Yau, K.K., & Chen, G. (2013). Risk factors associated with traffic violations
and accident severity in China. Accident Analysis & Prevention, 59, 18-25.
Zhang, G., Yau, K.K., & Gong, X. (2014). Traffic violations in Guangdong Province of
China: speeding and drunk driving. Accident Analysis & Prevention, 64, 30-40.
Zhao, S., Wang, K., Liu, C., & Jackson, E. (2019). Investigating the effects of monthly
weather variations on Connecticut freeway crashes from 2011 to 2015. Journal of
Safety Research, 71, 153-162.
Zheng, L., Ismail, K., & Meng, X. (2014). Traffic conflict techniques for road safety
analysis: open questions and some insights. Canadian Journal of Civil
Engineering, 41(7), 633-641.
Zhou, T., & Zhang, J. (2019). Analysis of commercial truck drivers’ potentially
dangerous driving behaviors based on 11-month digital tachograph data and
multilevel modeling approach. Accident Analysis & Prevention, 132, 105256.

180
Appendix
Questionnaire survey for speeding violation
Section 1 State Preference
Comprehensive strategy has been adopted by the Hong Kong Government to tackle the
speeding problem and to improve road safety. The application of camera systems is one
of the major approaches for the speed enforcement since 1999. As of 2012, the transport
department has installed 120 camera housing units for speed enforcement, of which
only 20 have actual cameras within these units (that is, the camera-to-housing ratio
today is 20:120). However, in the future, this ratio may be changed to enhance the
effectiveness by increasing the number of cameras or the housings. Meanwhile,
adequate advance warning signs will be erected to alert drivers of the presence of this
speed enforcement camera systems. Also, the current penalties for speeding are as
given below.
Table 1 Current penalties for speeding in Hong Kong
Level
Speeding Offences in Excess of Speed Limit by
Monetary Fine
DOP
1
15 km/h or less
320
0
2
15 + km/h ~ 30 km/h
450
3
3
30 + km/h ~ 45 km/h
600
5
Attention:There are three types of locations on the roadway, as identified below.
Table 2 three types of locations
Location Type
Characterization
A
Plain Section
No enforcement and no warning signs in roadway
section
B
Warning Section
Warning sign indicating the presence of speed camera
housing unit X meters ahead
C
Camera housing
Section
Camera housing unit present in roadway section
Figure 1 Illustration of the road sections
With the above as background, we will present you with four scenarios, reflecting:
181
(a) different levels of penalty for speed violations;
(b) different camera-to-housing ratios;
(c) different placement of the warning sign.
Consider a roadway with a speed limit of 50 km/h.
Please consider each scenario carefully, and make a choice of the speed at which you
would travel for each of the three location types on the roadway.
If you are in location Type A (Plain section), at which speed range would you travel ?
(choose one option from below)
< 50 km/h 51-65 km/h 66-80 km/h
If you are in location Type B (Warning section), at which speed range would you
travel ?
< 50 km/h 51-65 km/h 66-80 km/h
If you are in location Type C (Camera housing section), at which speed range would
you travel ?
< 50 km/h 51-65 km/h 66-80 km/h
If you are in location Type A (Plain section), at which speed range would you travel ?
(choose one option from below)
< 50 km/h 51-65 km/h 66-80 km/h
If you are in location Type B (Warning section), at which speed range would you
travel ?
< 50 km/h 51-65 km/h 66-80 km/h
Background information
Speed(km/h)
< 50
51 - 65
66 - 80
Penalty for speed
violation
➢ DOP
➢ Fine
0
0
3
0
320 HKD
450 HKD
Camera-to-Housing ratio
20 cameras in 240 housing units
Location of the warning sign in
section B
Warning Sign placed 50 meters ahead of
housing unit
Background information
Speed(km/h)
< 50
51 - 65
66 - 80
Penalty for speed
violation
➢ DOP
➢ Fine
0
2
3
0
320 HKD
450 HKD
Camera-to-Housing ratio
40 cameras in 120 housing units
Location of the warning sign in
section B
Warning Sign placed 200 meters ahead of
housing unit
Scenario ○
1
Scenario ○
2

182
If you are in location Type C (Camera housing section), at which speed range would
you travel ?
< 50 km/h 51-65 km/h 66-80 km/h
If you are in location Type A (Plain section), at which speed range would you travel ?
(choose one option from below)
< 50 km/h 51-65 km/h 66-80 km/h
If you are in location Type B (Warning section), at which speed range would you
travel ?
< 50 km/h 51-65 km/h 66-80 km/h
If you are in location Type C (Camera housing section), at which speed range would
you travel ?
< 50 km/h 51-65 km/h 66-80 km/h
If you are in location Type A (Plain section), at which speed range would you travel ?
(choose one option from below)
< 50 km/h 51-65 km/h 66-80 km/h
If you are in location Type B (Warning section), at which speed range would you
travel ?
< 50 km/h 51-65 km/h 66-80 km/h
If you are in location Type C (Camera housing section), at which speed range would
you travel ?
< 50 km/h 51-65 km/h 66-80 km/h
Background information
Speed(km/h)
< 50
51 - 65
66 - 80
Penalty for speed
violation
➢ DOP
➢ Fine
0
0
5
0
320 HKD
450 HKD
Camera-to-Housing ratio
20 cameras in 120 housing units
Location of the warning sign in
section B
Warning Sign placed 150 meters ahead of
housing unit
Background information
Speed(km/h)
< 50
51 - 65
66 - 80
Penalty for speed
violation
➢ DOP
➢ Fine
0
0
5
0
420 HKD
550 HKD
Camera-to-Housing ratio
40 cameras in 120 housing units
Location of the warning sign in
section B
Warning Sign placed 100 meters ahead of
housing unit
Scenario ○
3
Scenario ○
4

183
Section 2 Driving history and perception
1. Have you been involved in any traffic accidents in the past 12 months?
No
Yes[involved in time(s)]
2. Have you received tickets for violating the speed limit in past 12 months?
No [please turn to question 3]
Yes[How many tickets have you received in past 12 months?]
○ 1~3
○ 4~6
○ 7~9
○ > 10
3. In how many out of 10 trips have you noticed the orange housings?
○ 0
○ 1~3 time(s)
○ 4~6 times
○ 7~9 times
○ 10 times
4. I think speeding cameras are effective to catch offenders.
○1(Strongly disagree)
○2
○3
○4
○5(Strongly agree)
5. If you are speeding now, how likely will you decelerate when you see a:
i. Warning sign for alerting motorists of the presence of speed camera system
○1(Not at all)
○2
○3
○4
○5(Very much likely)
ii. Orange housing for speeding camera
○1(Not at all)
○2
○3
○4
○5(Very much likely)
6. Speeding violation is a very risky behavior that leads to property damage only.
○1(Strongly disagree)
○2
○3
○4
○5(Strongly agree)
7. Speeding violation is a very risky behavior that leads to injuries.
○1(Strongly disagree)
○2
○3
○4
○5(Strongly agree)
Section 3 Personal information
1. Gender: Male Female
2. Age: 18-25 26-35 36-45 46-55 56-65 > 66
3. Education: Primary Secondary Tertiary or above
4. Marital status:
Single Married/Cohabiting Divorced/Separated Widowed
5. Personal monthly income:
< 10,000 HKD
10,000-14,999 HKD
15,000-19,999 HKD
20,000-24,999 HKD
25,000-29,999 HKD
> 30,000 HKD
6. How many years have you obtained your driving license? _______ year(s)
7. What is your current driving-offence points on driving license? (0-15
point(s))
8. How many hours do you usually drive per day? hour(s)
9. How many days do you usually drive per week? day(s)
10. What is the type of your vehicle?
Taxi
Private Bus
Franchised Bus
Public Light Bus
Light Van
Medium/heavy Goods vehicle
Others
11. What is your current employment status?
Self-employed Permanent Contract
12. What is your current salary system?
Trip based Hourly Shift based Monthly
