
Michigan Technological University Michigan Technological University
Digital Commons @ Michigan Tech Digital Commons @ Michigan Tech
Michigan Tech Publications, Part 2
4-26-2024
Channel Prediction for Underwater Acoustic Communication: A Channel Prediction for Underwater Acoustic Communication: A
Review and Performance Evaluation of Algorithms Review and Performance Evaluation of Algorithms
Haotian Liu
Harbin Engineering University
Lu Ma
Harbin Engineering University
Zhaohui Wang
Michigan Technological University
Gang Qiao
Harbin Engineering University
Follow this and additional works at: https://digitalcommons.mtu.edu/michigantech-p2
Part of the Electrical and Computer Engineering Commons
Recommended Citation Recommended Citation
Liu, H., Ma, L., Wang, Z., & Qiao, G. (2024). Channel Prediction for Underwater Acoustic Communication: A
Review and Performance Evaluation of Algorithms.
Remote Sensing, 16
(9). http://doi.org/10.3390/
rs16091546
Retrieved from: https://digitalcommons.mtu.edu/michigantech-p2/753
Follow this and additional works at: https://digitalcommons.mtu.edu/michigantech-p2
Part of the Electrical and Computer Engineering Commons

Citation: Liu, H.; Ma, L.; Wang, Z.;
Qiao, G. Channel Prediction for
Underwater Acoustic
Communication: A Review and
Performance Evaluation of
Algorithms. Remote Sens. 2024, 16,
1546. https://doi.org/10.3390/
rs16091546
Academic Editor: Jaroslaw Tegowski
Received: 6 March 2024
Revised: 19 April 2024
Accepted: 22 April 2024
Published: 26 April 2024
Copyright: © 2024 by the authors.
Licensee MDPI, Basel, Switzerland.
This article is an open access article
distributed under the terms and
conditions of the Creative Commons
Attribution (CC BY) license (https://
creativecommons.org/licenses/by/
4.0/).
remote sensing
Review
Channel Prediction for Underwater Acoustic Communication:
A Review and Performance Evaluation of Algorithms
Haotian Liu
1,2,3
, Lu Ma
1,2,3,
*, Zhaohui Wang
4
and Gang Qiao
1,2,3
1
National Key Laboratory of Underwater Acoustic Technology, Harbin Engineering University,
Harbin 150001, China; [email protected] (H.L.); [email protected] (G.Q.)
2
Key Laboratory of Marine Information Acquisition and Security (Harbin Engineering University),
Ministry of Industry and Information Technology, Harbin Engineering University, Harbin 150001, China
3
College of Underwater Acoustic Engineering, Harbin Engineering University, Harbin 150001, China
4
Department of Electronic and Computer Engineering, Michigan Technological University,
Houghton, MI 49931, USA; [email protected]
* Correspondence: [email protected]; Tel.: +86-189-4605-7081
Abstract: Underwater acoustic (UWA) channel prediction technology, as an important topic in UWA
communication, has played an important role in UWA adaptive communication network and under-
water target perception. Although many significant advancements have been achieved in underwater
acoustic channel prediction over the years, a comprehensive summary and introduction is still lacking.
As the first comprehensive overview of UWA channel prediction, this paper introduces past works
and algorithm implementation methods of channel prediction from the perspective of linear, kernel-
based, and deep learning approaches. Importantly, based on available at-sea experiment datasets,
this paper compares the performance of current primary UWA channel prediction algorithms under a
unified system framework, providing researchers with a comprehensive and objective understanding
of UWA channel prediction. Finally, it discusses the directions and challenges for future research.
The survey finds that linear prediction algorithms are the most widely applied, and deep learning, as
the most advanced type of algorithm, has moved this field into a new stage. The experimental results
show that the linear algorithms have the lowest computational complexity, and when the training
samples are sufficient, deep learning algorithms have the best prediction performance.
Keywords: underwater wireless communication and networks; underwater acoustic communication;
underwater acoustic channel prediction
1. Introduction
Underwater acoustic (UWA) communication plays an important role in ocean explo-
ration and development. It is a reliable method for long-distance information transmission
of underwater vehicles and sensors. Most of the commercial UWA modems have a commu-
nication distance ranging from 250 m to 15,000 m [
1
], with the communication rate varying
from 100 bps to 62,500 bps [
2
]. The transmission time of UWA communication is usually
several seconds but up to ten seconds, because sound propagates in water at a very low
speed (1500 m/s).
The nature of the complex UWA channel is the main factor that limits the performance
of UWA communication. It has the characteristics of multipath transmission, frequency
selective fading, and limited bandwidth [
3
]. Specifically, the UWA channel typically exhibits
delay spreads ranging from 10 to 100 ms [
4
], corresponding to a coherent bandwidth of
10 to 100 Hz. At the same time, the bandwidth of UWA communication is in the range
of
2–36 kHz [1,2]
, so frequency selective fading will seriously affect the performance of
UWA communication. In order to actively adapt to the complex UWA channels and ocean
environment, adaptive modulation technology at the transmitter has been widely studied
in recent years. The key to determining its performance is whether the channel state
Remote Sens. 2024, 16, 1546. https://doi.org/10.3390/rs16091546 https://www.mdpi.com/journal/remotesensing

Remote Sens. 2024, 16, 1546
2 of 24
information (CSI) can be obtained accurately. The time-variation of UWA channels makes
channel prediction very important.
In the adaptive single-carrier modulation scheme, the use and prediction of statistical
CSI are common [
5
–
8
]. Qarabaqi and Stojanovic predicted the average received power and
realized adaptive power control with the predicted value [
9
]. Their results indicate that
the proposed method can save transmission power over a long period. Pelekanakis et al.
achieved adaptive selection of direct sequence spread spectrum signals based on their bit
error ratio (BER) prediction via boosted trees [
10
]. Experiments showed 10–20 times faster
communication was achieved by this method.
In adaptive multi-carrier modulation schemes, two methods can be employed to
utilize CSI. The first method exploits only statistical CSI, assuming that the statistical
CSI is stable. In this case, only CSI feedback needs to be performed without performing
channel prediction [
11
–
14
]. Qiao et al. from Harbin Engineering University proposed
outdated CSI and average CSI selection methods based on channel correlation factors
in orthogonal frequency-division multiplexing (OFDM) access for UWA [
14
]. They also
proposed a CSI feedback method based on data fitting, which was validated using real-time
at-sea experiments.
Another adaptive multi-carrier modulation scheme approach is to exploit instanta-
neous CSI for adaptive bit and power allocation of individual subcarriers. This method
requires instantaneous predicted CSI. In this field, many scholars have undertaken a
lot of research. In 2011, Radosevic et al. explored prediction of the UWA channel im-
pulse response (CIR) one signal transmission time ahead [
4
]. In the same year, combined
with the channel prediction algorithm of [
4
,
15
], they designed two adaptive orthogonal
frequency-division multiplexing (OFDM) modulation schemes based on limited feedback
—experiments showed that the system achieved higher throughput at the same power and
target BER. Cheng et al. from Colorado State University conducted a study on UWA OFDM
communication technology based on adaptive relay forwarding. The power allocation of
each subcarrier of OFDM was carried out based on the predicted channel [16].
Channel prediction has been studied in wireless adaptive communication for a long
time [
17
–
20
], with a wide variety of algorithms developed. As early as 2004, to enhance
the performance of adaptive coding and modulation, Oien et al. employed a linear fading-
envelope predictor for CSI prediction [
21
]. In 2014, ref. [
22
] proposed a high-precision
time-varying channel prediction method, which combined a multi-layer neural network
with a Chirp-Z transform. In 2020, Luo et al. combined environmental features and CSI
and designed a deep learning framework for 5G channel prediction [23].
UWA channel prediction developed relatively later compared to wireless channel
prediction, but it has also produced various types of algorithms. The development of
UWA channel prediction algorithms is closely related to the development of algorithms
such as machine learning. In the beginning, linear prediction algorithms represented by
recursive least squares (RLS) were applied, and then kernel-based algorithms also began to
be applied. In recent years, with the continuous progress of deep learning algorithms and
their application in various fields, UWA channel prediction has entered a new stage.
As far as we are aware, a review of UWA channel prediction has not yet been con-
ducted. Furthermore, there is no existing work that explicitly explores the performance
evaluation and computational complexity of various algorithms based on the same dataset,
as undertaken in this paper.
The contributions of this paper are as follows and are shown in Figure 1:
•
We introduce the application of UWA channel prediction technology in UWA commu-
nication.
•
This paper classifies current UWA channel prediction techniques and introduces its
principles, implementation methods, and specific applications.
•
Based on the at-sea experiment dataset from the 2007 Autonomous Underwater
Vehicle Festival (AUVFest07) [
24
] and the UnderWater AcousTic channEl Replay
benchMARK (Watermark) [
25
], we comprehensively compare the existing typical

Remote Sens. 2024, 16, 1546
3 of 24
underwater acoustic channel prediction algorithms under a unified system framework,
and objectively analyze the prediction performance and computational complexity of
these algorithms.
•
We analyze the advantages and limitations of different algorithms based on the exper-
imental results. Additionally, we discuss the existing challenges and potential future
development directions of UWA channel prediction.
UWA channel
prediction
algorithms
Recursive Least Squares
Minimum Mean Square Error
Exponential Smoothing
Kalman filtering
Linear
algorithms
Kernel-based
algorithms
Kernel Regularized Least Squares
Support Vector Regression
Convolutional Neural Networks
Long Short-Term Memory
Deep learning
algorithms
Channel prediction
algorithm
evaluation
UWA channel
prediction
Channel
datasets
AUVFest07
Watermark NCS1
Normalized Mean Square Error
Normalized Prediction Error
Computational Complexity
Performance
index
Figure 1. The main structure of this paper.
The paper is organized as follows: In Section 2, we review and summarize the typical
algorithms of UWA channel prediction and their application in communication systems.
In Section 3, we describe a comparative experiment based on real data collected during
experiments to test the prediction performance of typical algorithms. In Section 4, we
provide concluding remarks.
Notation: Throughout the paper, the superscripts
∗
,
T
,
H
,
<>
denote the conjugate,
transpose, conjugate transpose, and ensemble average, respectively. Scalars are written in
lower case, vectors are in lower case bold, and matrices are in bold capitals. All acronyms
used in this paper are defined in Table 1.
Table 1. Acronyms used in this paper.
Acronym Full Name Acronym Full Name
UWA underwater acoustic CS compressed sensing
CSI channel state information SNR signal-to-noise ratio
BER bit error ratio NMSE normalized mean square error
CIR channel impulse response KAF kernel adaptive filter
OFDM orthogonal frequency-division multiplexing KRLS kernel recursive least squares

Remote Sens. 2024, 16, 1546
4 of 24
Table 1. Cont.
Acronym Full Name Acronym Full Name
RLS recursive least squares SVM support vector machine
MMSE minimum mean square error SVR support vector regression
LMMSE linear minimum mean square error RNN recurrent neural networks
ES exponential smoothing LSTM long short-term memory
2. Algorithms for Underwater Acoustic Channel Prediction
Figure 2 shows the whole process of channel prediction. When the number of observed
historical channels is small, linear algorithms can be used to predict; when the number is
large enough, algorithms such as deep learning can be used for prediction.
When explaining the channel prediction algorithms, the channel is uniformly defined
as a coherent multipath channel in the time domain, and can be expressed as
h(τ, t) =
P−1
∑
p=0
h
p
(t)δ(τ − τ
p
(t)), (1)
where
P
is the number of channel taps,
t
is the time when the channel is observed, and
τ
is
the delay variable.
h
p
(t)
and
τ
p
(t)
represent the p-th tap and the corresponding delay at
time t, respectively.
Then, h(τ, t) is discretized in time, and the channel at time n can be expressed as
h[n] = [ h
1
(n)h
2
(n) . . . h
P
(n)] (2)
We predict h
[n]
. At time
n
, we choose to use the past
M
estimated channels
˜
h[n],
˜
h[n − 1], . . . ,
˜
h[n − M + 1]
to obtain the predicted channel
ˆ
h[n + N]
at n + N
time, where
˜
h[n] =[
˜
h
1
(n)
˜
h
2
(n) . . .
˜
h
P
(n)]
ˆ
h[n + N] =[
ˆ
h
1
(n + N)
ˆ
h
2
(n + N) . . .
ˆ
h
P
(n + N)]
(3)
In the actual prediction process, we predict each tap separately and then combine them
into the predicted channel
ˆ
h[n + N]
. At this time, the prediction problem of the channels is
transformed into a time series prediction problem about tap
˜
h
P
(n).
When we predict tap
˜
h
P
(n)
, the input of the predictor can be expressed as
˜x
p
[n]
, and
the output of the predictor is expressed as
ˆ
y
p
[n + N]
;
ˆ
y
p
[n + N]
is the predicted value of
the p-th tap at n + N time. The prediction process of the predictors can be expressed as
ˆ
y
p
[n + N] = f (˜x
p
[n]), (4)
where
ˆ
y
p
[n + N] =
ˆ
h
p
(n + N) (5)
˜x
p
[n] = [
˜
h
p
(n)
˜
h
p
(n − 1) . . .
˜
h
p
(n − M + 1)]
T
(6)
When the predicted values of all taps at time
n + N
are obtained, we can obtain the
predicted channel
ˆ
h[n + N] according to Equation (3).
Figure 2 shows the whole process of channel prediction. When the number of observed
historical channels is small, the linear algorithm can be used to predict; when the number
is large enough, algorithms such as deep learning can be used for prediction. From
Figure 2 and the above equations, it can be inferred that Equation (4) is crucial for channel
prediction. In the following subsections, we will categorically investigate the prediction
process
ˆ
y
p
[n + N] = f (˜x
p
[n]) of the predictor.

Remote Sens. 2024, 16, 1546
5 of 24
……
channel
decomposition
……
……
f ( )
1
ˆ
[]y n N+
ˆ
[]
p
y n N+
1
[]nx
[]
p
nx
1
()hn
Discretized
channel matrix
Tap time series
Predicted
channel
ˆ
[]nN+h
…
…
…
…
…
…
…
…
…
…
…
…
()
P
hn
Predictor
Input
Channel preprocessing
Output
f ( )
Channel prediction
Several
estimated
channels
Arrange
by time
order
[]nh
[ 1]n −h
…
(a)
channel
decomposition
ˆ
[]
p
y n N+
1
[]nx
[]
p
nx
Channel preprocessing
Channel prediction
…
…
…
…
…
…
…
…
……
……
[ ], [ ]
pp
i y i N+x
11
[ ], [ ]i y i N+x
Training model
Training model
Tap time series
Discretized
channel matrix
1
()hn
Training set
Testing set
()
P
hn
…
…
…
Divide
training set
testing set
……
f ( )
1
ˆ
[]y n N+
Predicted
channel
…
…
…
Predictor
Input
Output
f ( )
ˆ
[]nN+h
Several
estimated
channels
Arrange
by time
order
[]nh
[ 1]n −h
…
Data
transmission
(b)
Figure 2. The process of channel prediction. (a) Algorithms that do not require training. (b) Algo-
rithms that require training.
In this paper, the variable definitions concerning channel prediction are presented
in Table 2.
Table 2. The definitions of variables related to channel prediction.
Variable Definition
P Number of channel taps (number of predictors)
M Number of historical channels for prediction
N Predicting the channel after N steps
N
train
Number of training set channels

Remote Sens. 2024, 16, 1546
6 of 24
Table 2. Cont.
Variable Definition
N
test
Number of testing set channels
˜
h[n] Estimated channel at time n
ˆ
h[n + N] Predicted channel at time n + N
˜
h[n + N] Estimated channel at time n + N, which is used to calculate the channel prediction error
˜x
p
[n] Input of the predictor for the p-th tap
ˆ
y
p
[n + N] Output of the predictor for the p-th tap
˜
y
p
[n + N] Estimate value of the p-th tap at the time n + N, which is used to calculate the predictor error
2.1. Linear Algorithms
Linear predictions are the earliest and most widely used algorithms in UWA channel
prediction. Typical algorithms include RLS, minimum mean square error (MMSE), expo-
nential smoothing (ES), and Kalman filtering, where RLS and MMSE are methods used to
determine the coefficients of linear regression algorithms.
In linear regression algorithms, historical channel data can be used to obtain the
predicted channel through linear combination. Linear regression prediction algorithms can
generally be expressed as
ˆ
y
p
[n + N] = w
T
˜x
p
[n], (7)
where w represents the linear weighting coefficient.
RLS: RLS is a typical parameter determination method. As a recursive algorithm, RLS
can re-estimate the weighting coefficients using the least square criterion based on the cur-
rent input signal. The disadvantage of RLS is that, compared with other linear algorithms,
the coefficient update process is more complicated and the amount of calculation required
is larger.
The prediction process of the RLS algorithm is shown in Algorithm 1, where
δ
is
a small constant, u
[n]
is the gain matrix, T
[n]
is the inverse matrix of the correlation
matrix, w
[n]
is the prediction coefficients,
e[n]
is the prediction error at time
n
, and
λ
is the
forgetting factor.
Algorithm 1 RLS prediction algorithm
Input: ˜x
p
[n]
Output:
ˆ
y
p
[n + N]
Initialization: w[0] = 0,T[0] = δ
−1
I
for n = N, N + 1, . . . do
u[n] =
T[n − N]˜x
p
[n − N]
λ + ˜x
H
p
[n − N]T[n − N]˜x
p
[n − N]
ˆ
y
p
[n] = w
T
[n − N]˜x
p
[n − N]
e[n] =
˜
y
p
[n] −
ˆ
y
p
[n]
w[n] = w[n − N] + u[n]e[n]
T[n] = λ
−1
T[n − N] − λ
−1
u[n]˜x
H
p
[n − N]T[n − N]
end for
Generally, in order to simplify the operation, the channel can be modeled as a sparse
structure. Stojanovic et al. utilized the sparse multipath structure of the channel and
employed the RLS algorithm for channel prediction [
4
]. In [
4
], the authors proposed a joint
prediction based on all channel coefficients from each different receive element. Based

Remote Sens. 2024, 16, 1546
7 of 24
on [
4
], Stojanovic et al. designed an adaptive OFDM system, and provided real-time
adaptive modulation results in a sea experiment [
26
]. Ref. [
27
] validated the performance of
the prediction algorithm proposed in [
4
], using experimental data from the South China Sea.
In UWA channel prediction, channel estimation methods also need to be considered.
Under the condition of a sparse channel and using the RLS prediction method, compressed
sensing (CS) can obtain a lower BER than MMSE channel estimation methods in an OFDM
adaptive system [28].
In addition to adaptive modulation, ref. [
29
] used the channel predicted by RLS
for precoding at the transmitter, resulting in energy savings for certain specific nodes in
cooperative communications. Ref. [
30
] performed channel prediction in the delay-Doppler
domain. The receiver predicted the channel for the next data block based on the estimated
channel of the previous data block, and utilized the prediction values to perform channel
equalization to improve system performance.
When the channel observation data have a long-time span, the periodic change of the
channel can be used to predict. Sun and Wang modeled the channel as a combination of
a Markov process and an environment variable. To improve the prediction performance,
data from the same time period but one epoch prior were taken into consideration. When
the time span of the experimental data was 250 h, channel prediction achieved good
performance [31].
MMSE: In the MMSE algorithm, all known channels need to be used to calculate the
covariance matrix and to perform the matrix inversion. Furthermore, the data are required
to be generalized stationary. In practical applications, as the amount of data increases,
the covariance matrix can be updated. The determination method of the coefficient is
as follows:
The prediction process of the MMSE algorithm is shown in Algorithm 2, where
C
xx
is
the variance of
˜x
p
[n]
,
c
xy
is the covariance of
˜x
p
[n]
and
˜
y
p
[n]
, w is the weight coefficient,
and µ
x
and µ
y
are the mean values of variables ˜x
p
[n] and
˜
y
p
[n], respectively.
Algorithm 2 MMSE prediction algorithm
Input: ˜x
p
[n]
Output:
ˆ
y
p
[n + N]
for n = 1, 2, . . . do
C
xx
= E
[˜x
p
− µ
x
][˜x
p
− µ
x
]
T
c
xy
= E
[˜x
p
− µ
x
][
˜
y
p
− µ
y
]
T
w = C
xx
−1
c
xy
ˆ
y
p
[n + N] = w
T
˜x
p
[n]
end for
Stojanovic et al. applied channel prediction to single input multiple output (SIMO)
OFDM systems [
32
]. In order to expand the system throughput, pilots were not installed
in all OFDM data blocks but rather were placed at regular intervals. At the receiver, the
channels estimated by pilots were exploited to predict the channel for OFDM data blocks
without pilot symbols based on the MMSE criterion. Additionally, the system can also
predict the channel for the next transmission time, providing information for the power
allocation algorithm proposed in the literature.
In [
33
], the authors proposed a sparse channel parameter feedback method based on
CS theory in adaptive modulation OFDM systems. Subsequently, the predicted channels
were transformed into the frequency domain, where the received signal-to-noise ratio
(SNR) for each subcarrier could be obtained, and the appropriate modulation scheme could
be selected. The experimental results showed that, compared with the fixed modulation
scheme, adaptive modulation based on CS channel estimation and linear minimum mean
square error (LMMSE) channel prediction achieved better performance.

Remote Sens. 2024, 16, 1546
8 of 24
ES: ES is a typical algorithm used in the field of time series analysis, which was first
proposed by Robert [
34
]. In the ES algorithm, the predicted value is represented as the
exponential weighted sum of historical channel data. It uses a smoothing factor that assigns
higher weights to data points that are closer to the predicted value. Three basic variations
of ES are commonly used for channel prediction: simple ES, trend-corrected ES, and the
Holt–Winters’ method.
The prediction process of the simple ES algorithm is shown in Algorithm 3. For the ES
algorithm, M and N in Equations (5) and (6) are set to 1; a is the pre-defined parameter.
Algorithm 3 ES prediction algorithm
Input:
˜
x
p
[n] =
˜
h
p
(n)
Output:
ˆ
y
p
[n + 1] =
ˆ
h
p
(n + 1)
Initialization:
ˆ
y
p
[1] = 0
for n = 1, 2, 3, . . . do
ˆ
y
p
[n + 1] = a
˜
x
p
[n] + (1 − a)
ˆ
y
p
[n]
end for
The Holt–Winters algorithm was employed by Wang et al. to predict the SNR of the
channel, which was then used for adaptive scheduling of point-to-point data transmis-
sion [
35
]. The algorithm also focused on seasonal prediction models on large time scales.
By predicting the channel SNR, the system can adaptively determine the time slot of data
transmission, resulting in improved energy efficiency compared to fixed-time transmission.
In [
36
], the Holt–Winters algorithm was also employed to predict the SNR for re-
placing the outdated information. The predicted information was then utilized for data
transmission between underwater target users and the surface central node. The SNR data
used in the simulation range from 1 to 100 h. The results show that the system using the
prediction algorithm would perform better than that using the feedback data by calculating
the normalized mean square error (NMSE).
Kalman filtering: As a time-domain filtering method, a Kalman filter can recursively
obtain the estimator by using the observations related to the state equation. In UWA
communication, it is widely used in channel estimation [
37
], channel equalization [
38
],
channel tracking [39–41], and multi-user detection [42].
In [
43
], by exploiting channel knowledge obtained from prediction techniques, the
author proposed an OFDM scheme which can adaptively adjust the length of the cyclic
prefix. Channel prediction was operated in the frequency domain, and the evolution of a
single sub-channel was tracked via a Kalman filter. The experiments demonstrated that the
proposed approach reduced the BER of communication and avoided exchange of overhead
information between the transmitting and receiving nodes.
2.2. Kernel-Based Algorithms
Linear algorithms have advantages in terms of simplicity and real-time performance,
but have limitations when dealing with channel prediction. Linear algorithms have a simple
structure and are easily modeled. Generally, they do not require historical channel data for
training and can perform online prediction directly. However, the lack of data-fitting ability
makes it difficult to deal with nonlinear problems. In such cases, the use of more complex
kernel-based algorithms is a more appropriate choice. In general, kernel-based algorithms
are commonly performed using kernel methods, which can map data to high-dimensional
space through a kernel trick. By utilizing linear calculations in the high-dimensional space,
it becomes possible to achieve non-linear fitting of the channel data [
44
]. Typical kernel-
based algorithms include the kernel adaptive filter (KAF) and support vector machine
(SVM) [45]. Both algorithms can achieve accurate fitting of complex data patterns.

Remote Sens. 2024, 16, 1546
9 of 24
KAF: KAF can be considered as an extension of linear filtering algorithms in the
kernel space. Typical KAF algorithms include the kernel least mean squares algorithm [
46
],
the kernel recursive least squares (KRLS) algorithm [
47
], and the kernel affine projection
algorithm [
48
]. Based on these three typical algorithms, a number of improved algorithms
have been introduced. A comparison of typical KAF algorithms was provided in [49].
Taking KRLS as an example, it can be viewed as an extension of RLS in a high-
dimensional feature space. The prediction process of the KRLS algorithm is shown in
Algorithm 4
, where U
[n]
is the kernel inverse matrix, d
[n]
is the characteristic space coeffi-
cient matrix, q
[n]
and
r[n]
are adaptive control quantities,
e[n]
is the prediction error,
κ()
is
the kernel function, and γ is the regularization factor.
Algorithm 4 KRLS prediction algorithm
Input: ˜x
p
[n]
Output:
ˆ
y
p
[n + N]
Initialization: U[0] = (κ(˜x
p
[0], ˜x
p
[0]) + γ)
−1
, d[0] = U[0]
˜
y
p
[N]
for n = N, N + 1, N + 2, . . . do
P[n] = [κ(˜x
p
[n − N], ˜x
p
[0]), . . . , κ(˜x
p
[n − N], ˜x
p
[n − N − 1])]
T
ˆ
y
p
[n] = P[n]
T
d[n − N]
e[n] =
˜
y
p
[n] −
ˆ
y
p
[n]
q[n] = U[n − N]P[n]
r[n] = γ + κ(˜x
p
[n − N], ˜x
p
[n − N]) − q[n]
T
P[n]
U[n] = r[n]
−1
"
U[n − N]r[n] + q[n]q[n]
T
−q[n]
−q[n]
T
1
#
d[n] =
"
d[n − N] − q[n]r[n]
−1
e[n]
r[n]
−1
e[n]
#
end for
From the formulas, it can be observed that in the KRLS algorithm, the dimension
of U
[n]
is related to the number of samples. To address this issue, several improvement
algorithms have been proposed, such as sliding window KRLS [
50
] and fixed-budget
KRLS [51].
KAF has found extensive application in wireless channel prediction and time series
analysis. However, the ordinary KAF algorithm cannot deal with the interference of
impulse noise. In order to enhance the robustness of traditional KAF methods, such as
KRLS, we can choose to control the dictionary energy [
52
]. Refs. [
53
,
54
] improved the
prediction performance of nonlinear time series by using a generalized tanh function and an
energy dynamic threshold, respectively. Ref. [
55
] proposed using a sparse sliding-window
KRLS to achieve dynamic dictionary sample updates, which outperformed an approximate
linear dependency KRLS in fast time-varying multiple-input multiple-output systems.
In 2021, Liu et al. designed a comparative experiment to assess the performance of
prediction algorithms in addressing the subcarrier resource allocation problem in downlink
OFDM systems. They compared the proposed CsiPreNet model with KRLS, RLS, and
several neural networks [
56
]. Then, in 2023, Liu et al. proposed a system that incorporated
a per-subcarrier channel temporal correlation for channel optimization and subsequent
channel feedback [
57
]. In the evaluation, the approximate linear dependency KRLS and
other algorithms were also compared. The results of both experiments revealed that
the approximate linear dependency KRLS performed better than linear algorithms and
traditional neural networks.
SVM and SVR: SVM is developed by Vapnik [
58
], and is mainly applied in classification
problems, while support vector regression (SVR) is more suitable for function fitting.

Remote Sens. 2024, 16, 1546
10 of 24
SVM has been applied in the underwater acoustics field, but has mainly focused on
underwater target classification, channel equalization, and so on [
59
,
60
]. In terms of
time series prediction, it is extensively reported in [61].
Taking SVR as an example. Given a training set
˜x
p
[i],
˜
y
p
[i + N]
,
i =
1, 2, 3,
. . . N
train
,
the input–output relationship of the predictor during training is as follows:
˜
y
p
[i + N] = f
SVR
(˜x
p
[i]) = w
T
φ(˜x
p
[i]) + b, (8)
where
φ
is a high-dimensional mapping function, w is a weight vector, and
b
is the bias
term. The optimization goal during training can be expressed as
min
w,b
1
2
∥
w
∥
2
+ C
N
train
∑
i=1
(γ
i
+ γ
∗
i
) (9)
s.t.
˜
y
p
[i + N] − w
T
˜x
p
[i] − b ≤ θ + γ
∗
i
w
T
˜x
p
[i] + b −
˜
y
p
[i + N] ≤ θ + γ
i
(10)
i = 1, 2, . . . N
train
,
where
θ
is the margin of tolerance,
C
is the regularization constant, and
γ
∗
i
and
γ
i
are slack
variables. To resolve this convex optimization problem, the Lagrangian multipliers
β
,
β
∗
are introduced, and the corresponding dual optimization problem of Equation (9) can be
expressed as
max
β,β
∗
w(β, β
∗
) = −θ
N
train
∑
i=1
(β
i
+ β
∗
i
) +
N
train
∑
i=1
˜
y
p
[i + N](β
∗
i
− β
i
)
−
1
2
N
train
∑
i,j
(β
∗
i
− β
i
)(β
∗
j
− β
j
)κ(˜x
p
[i], ˜x
p
[j]) (11)
s.t.
N
train
∑
i=1
β
∗
i
=
N
train
∑
i=1
β
i
(12)
0 ≤ β
i
, β
∗
i
≤ C i = 1, . . . , N
train
When the training is over, the optimal
β
,
β
∗
can be obtained and the optimal fitted
regression equation for prediction can be expressed as
ˆ
y
p
[n + N] = f
SVR
(˜x
p
[n]) =
N
train
∑
i=1
(β
∗
i
− β
i
)κ(˜x
p
[i], ˜x
p
[n]) (13)
The prediction process of the SVR algorithm is shown in Algorithm 5.
Algorithm 5 SVR prediction algorithm
Input: training set
˜x
p
[i],
˜
y
p
[i + N]
, i = 1, 2, 3, . . . N
train
testing set
˜x
p
[n],
˜
y
p
[n + N]
, n = 1, 2, 3, . . . N
test
Output:
ˆ
y
p
[n + N]
training process:
Set the values of b, θ, C, and use the training set to obtain the best β, β
∗
.
predicting process:
for n = 1, 2, 3, . . . N
test
do
ˆ
y
p
[n + N] = f
SVR
(˜x
p
[n])
end for

Remote Sens. 2024, 16, 1546
11 of 24
In underwater acoustic channel prediction and adaptive modulation, SVM and SVR
serve different purposes. The SVM algorithm is commonly used for classification tasks.
In adaptive modulation systems, it is often employed to directly determine the optimal
modulation scheme based on historical channel data. On the other hand, the SVR algorithm
is more suitable for regression tasks. It can fit the historical channel data and predict
the channel at the next time step, and then the adaptive system can adapt to the channel
characteristics effectively.
In [
62
], the authors applied adaptive modulation to long distance UWA communi-
cation, utilizing the SVM and SVR algorithms. Since the channel in long-distance UWA
communication changes more rapidly than that in general UWA communication, the direct
use of a feedback channel will impose significant limitations on the communication per-
formance. The authors proposed adding an abstraction layer, in which abstract features
were extracted by SVM or SVR, and the modulation mode was selected after channel classi-
fication or performance prediction, which can improve the adaptability of the system to
mismatched channels. The experimental results demonstrated that the prediction algorithm
based on SVR achieved higher throughput in practice.
2.3. Deep Learning Algorithms
Deep neural networks perform channel prediction by using nonlinear layers to con-
struct complex networks [
63
]. Deep learning algorithms possess remarkable fitting capabil-
ities for data and have found widespread application in fields such as image classification
and language translation. Algorithms such as convolutional neural networks (CNNs) and
recurrent neural networks (RNNs) are utilized for time series prediction [
64
–
66
]. In the
field of communication, algorithms represented by CNNs and a variant of RNN, long
short-term memory (LSTM), are also applied to channel prediction [
67
–
69
]. LSTM has
already been applied in time series processing, while CNN is commonly used for image
classification [
70
]. To utilize CNN for time series and channel prediction, it is common to
employ a one-dimensional CNN model instead of the commonly used two-dimensional
model for image classification.
CNN: Taking a one-dimensional CNN model as an example, it includes input, 1D
convolution, 1D pooling and flattening layers. The convolution layer can analyze charac-
teristics of the input data through convolution operations. It uses a filter to scan the input
data matrix and generate the corresponding feature map. We use a filter to describe the
convolutional layer, where the weight of the filter is defined as W
con
, the data input to
the convolutional layer is
˜x
p
[n]
, the activation function is defined as
f
con
()
, and the bias
parameter is defined as
b
. Then, the output C
∗
of the convolutional layer can be written as:
C
∗
= f
con
(˜x
p
[n] ⊗ W
con
+ b) (14)
The convolutional result C
∗
will enter the pooling layer, which can reduce the size of
the feature map and extract more abstract features. Taking the maximum pooling layer as
an example, its output C
∗
can be expressed as
C
∗
= max(C
∗
) (15)
Assuming that the number of filters is
N
con
, the feature map passing through the pooling
layer can be expressed as [C
∗
1
, C
∗
2
, . . . , C
∗
N
con
].
Finally, the fully connected (FC) layer combines the elements of the feature map and
maps them to the label space of the sample, it can be expressed as
ˆ
y
p
[n + N] = f
FC
(C
∗
1
, C
∗
2
, . . . , C
∗
N
con
). (16)
The whole prediction process of the one-dimensional CNN can be simplified as
ˆ
y
p
[n + N] = f
CNN
(˜x
p
[n]). (17)

Remote Sens. 2024, 16, 1546
12 of 24
The prediction process of the CNN algorithm is shown in Algorithm 6.
Algorithm 6 CNN prediction algorithm
Input: training set
˜x
p
[i],
˜
y
p
[i + N]
, i = 1, 2, 3, . . . N
train
testing set
˜x
p
[n],
˜
y
p
[n + N]
, n = 1, 2, 3, . . . N
test
Output:
ˆ
y
p
[n + N]
training process:
Set the values of
N
con
, convolution kernel size, batch size, epoch, learning rate, loss function.
Use the training set to obtain the best model.
predicting process:
for n=1, 2, 3, . . . N
test
do
ˆ
y
p
[n + N] = f
CNN
(˜x
p
[n])
end for
LSTM: LSTM is a special RNN model that avoids long-term dependency problems
and is well-suited for time series prediction. A typical structure of an LSTM cell is shown
in Figure 3. The data update process of each part is as follows:
tanh
+
stanhs
s
n
k
n
v
1n−
v
1n−
k
n
x
n
k
f
n
i
n
o
n
Figure 3. Typical structure of LSTM cell.
Input Gate
Φ
i
n
= σ(W
i
· [k
n−1
, x
n
] + b
i
) (18)
Forget Gate
Φ
f
n
= σ(W
f
· [k
n−1
, x
n
] + b
f
) (19)
Output Gate
Φ
o
n
= σ(W
o
· [k
n−1
, x
n
] + b
o
) (20)
k
n
= Φ
o
n
∗ tanh(v
n
) (21)
Cell State
v
n
= Φ
f
n
∗ v
n−1
+ Φ
i
n
∗ tanh(W
c
· [k
n−1
, x
n
] + b
f
) (22)
where W
i
, W
c
, W
f
and W
o
are the coefficient weight matrices, and b
i
, b
c
, b
f
and b
o
are
the bias vectors.
Φ
i
n
,
Φ
f
n
and
Φ
o
n
are the input gate, forget gate, and the output gate,
respectively. k
n
is the hidden state, v
n
is the unit state, and x
n
is the unit input.
σ()
is the
sigmoid function. For LSTM channel prediction, Equation (4) can be rewritten as
ˆ
y
p
[n + N] = f
LSTM
(˜x
p
[n]). (23)
The prediction process of the LSTM algorithm is shown in Algorithm 7.

Remote Sens. 2024, 16, 1546
13 of 24
Algorithm 7 LSTM prediction algorithm
Input: training set
˜x
p
[i],
˜
y
p
[i + N]
, i = 1, 2, 3, . . . N
train
testing set
˜x
p
[n],
˜
y
p
[n + N]
, n = 1, 2, 3, . . . N
test
Output:
ˆ
y
p
[n + N]
training process:
Set the number of hidden layers, the number of hidden layer units, batch size, epoch,
learning rate, loss function.
Use the training set to obtain the best model.
predicting process:
for n=1, 2, 3, . . . N
test
do
ˆ
y
p
[n + N] = f
LSTM
(˜x
p
[n])
end for
In [
71
], a one-dimensional CNN was employed for predicting the performance of UWA
communications based on CIR. Two datasets were used in the experiments, and the results
demonstrated that the predictive performance of the CNN was superior to traditional
machine learning methods on any of the datasets. Furthermore, when the two datasets
were combined into a single dataset, the model still exhibited favorable performance.
In [
56
], a learning model named CsiPreNet was designed by Liu et al., which was
represented as a combination of CNN and LSTM. The CsiPreNet employed CNN to
extract the channel frequency domain features and then utilizeed LSTM to capture the
temporal correlations and to make predictions. In the simulation, the author compared
and analyzed the proposed CsiPreNet with LSTM, a back propagation neural network,
and RLS algorithms. The results revealed that the CsiPreNet algorithm achieved the best
performance under both error calculation methods.
In [
72
], the authors employed LSTM for channel prediction and then utilized rein-
forcement learning to improve the adaptive modulation system using predicted channels.
The results showed that the LSTM method can improve network throughput under the
constraint of BER. In order to improve the performance of LSTM, traditional LSTM can also
be combined with other models, such as a self-attention mechanism [73].
3. Experimental Evaluation
In current papers on underwater acoustic channel prediction, the performance of
algorithms is usually verified by comparative experiments. However, these experiments
suffer from certain shortcomings. Firstly, only a few typical algorithms are involved.
Secondly, different datasets are used between different experiments, making it difficult to
achieve a comprehensive understanding and comparison of algorithm performance. In
order to achieve a more effective comparison of prediction algorithms, in this section,
we will first select typical algorithms that have been widely verified in the previous
literature, then employ the same dataset for comparison, and, finally, utilize the same
evaluating indicator to quantify the performance differences among the algorithms. The
above methods can provide a more reliable and comprehensive understanding, which is
helpful to evaluate the effectiveness and applicability of various prediction algorithms.
3.1. Dataset Description
In the performance comparison experiments of different algorithms, CIRs were ob-
tained from the AUVFest07 experiment [
24
,
40
,
41
,
74
] and the Watermark database [
25
,
75
].
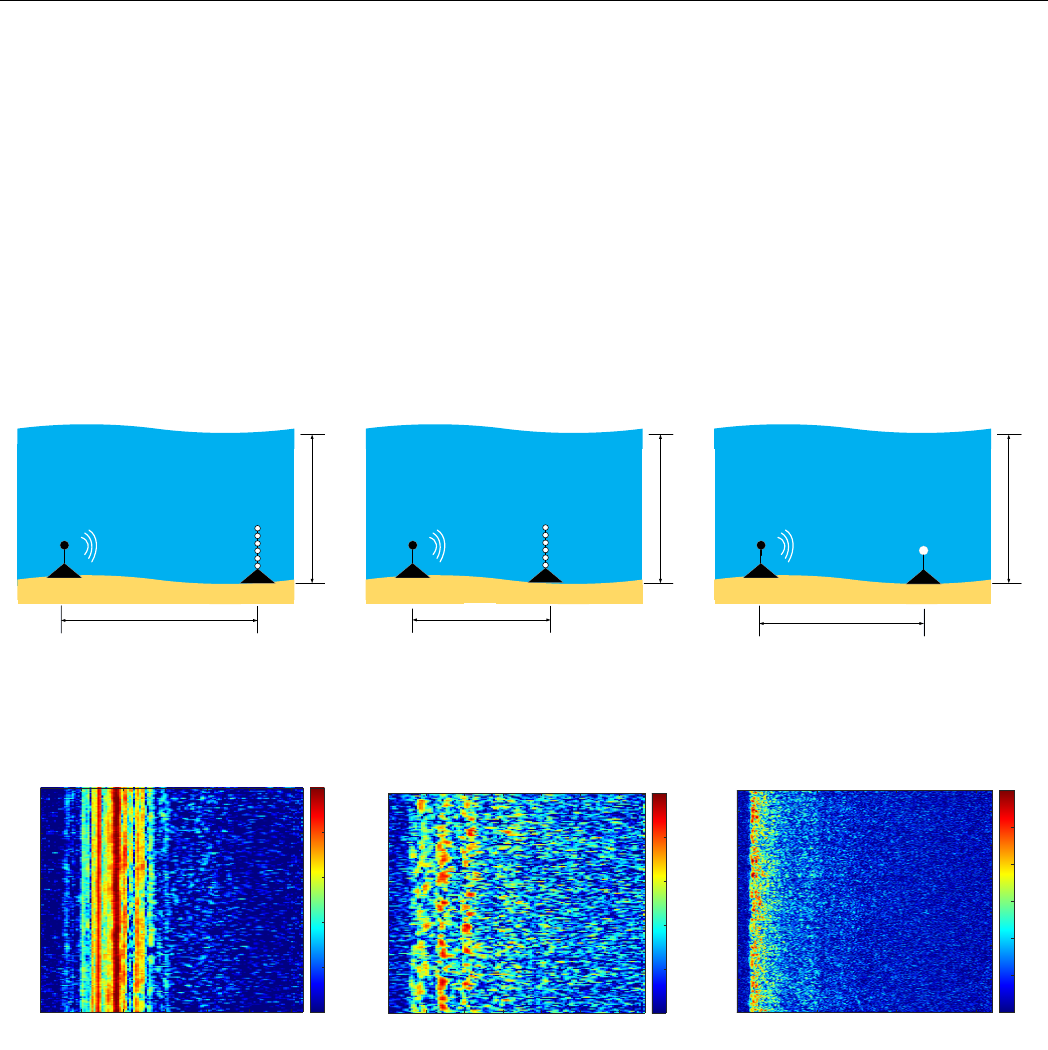
Figures 4 and 5 illustrate the equipment deployment and CIR obtained in AUVFest07
calm sea conditions, AUVFest07 rough sea conditions, and Watermark NCS1, respectively.
In Figure 5, the ordinate represents the observed time of the channel, and the abscissa
represents the delay spread of the channel.
Remote Sens. 2024, 16, 1546
14 of 24
The AUVFest07 experiment was carried out in nearshore waters at a depth of 20 m.
The sea conditions were relatively calm and rough, respectively. The experimental commu-
nication distances were 5 km and 2.3 km, respectively. The AUVFest07 experiment used
511 chips m-sequence signal, with frequency ranging from 15 kHz to 19 kHz. The duration
of each packet was 25 s, which contained a total of 198 m-sequences. The channel delay
was 5 ms and 12.5 ms, respectively, and the time interval of the channel at different times
was ∼0.12 s.
In the Watermark database, we used the channel obtained from the Norwegian conti-
nental shelf (NCS1). The depth of the sea was 80 m, and the communication distance was
540 m. The equipment was fixed at the seabed, so the influence of equipment movement
can be ignored.The signal type was pseudonoise, and its frequency ranged from 10 kHz to
18 kHz. One data packet contained more than 32.6 s of CIR. A total of 60 channel packets
were obtained in
∼
33 min. The channel delay was 32 ms, and the time interval of the
channel was ∼0.032 s.
Transmitter
Receiver
20m
5km
AUVFest07 calm
(a)
Transmitter
Receiver
20m
2.3km
AUVFest07 rough
(b)
Transmitter
Receiver
80m
540m
NCS1
(c)
Figure 4. Sketch of equipment deployment. (a) AUVFest07 calm sea conditions, (b) AUVFest07 rough
sea conditions, and (c) Watermark NCS1.
2 4 6 8 10 12
Delay(ms)
5
10
15
20
25
Time(s)
35
40
45
50
55
60
dB
(a)
2 4 6 8 10 12
Delay(ms)
5
10
15
20
25
Time(s)
!50
!45
!40
!35
!30
!25
dB
(b)
0 5 10 15
Delay(ms)
0
5
10
15
20
25
30
Time(s)
!70
!65
!60
!55
!50
!45
!40
dB
(c)
Figure 5. CIRs of (a) AUVFest07 calm sea conditions, (b) AUVFest07 rough sea conditions, and
(c) Watermark NCS1 [41,75].
It can be observed from Figure 5 that the energy of the channel is carried by several
main taps in AUVFest07 calm sea conditions, and the delays of the taps are relatively stable.
In AUVFest07 rough sea conditions, the distribution of energy is more dispersed, and the
delays of the main taps are not fixed. In the watermark NCS1, the initial taps have most of
the energy of the channel.
In order to exhibit the different time-varying properties of the channels, we provide
channel temporal coherence functions of three databases in Figure 6. One defines the
channel temporal coherence function ρ as [76].

Remote Sens. 2024, 16, 1546
15 of 24
0 5 10 15 20 25
Lag time(s)
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Temporal coherence
AUVFest07 calm sea
AUVFest07 rough sea
Watermark NCS1
Figure 6. Channel temporal coherence as a function of lag time in AUVFest07 calm sea conditions,
AUVFest07 rough sea conditions, and Watermark NCS1.
ρ(△t) =
⟨
h
∗
(τ, t)h(τ, t + △t )
⟩
p
⟨
h
∗
(τ, t)h(τ, t)
⟩⟨
h
∗
(τ, t + △t)h(τ, t + △t)
⟩
, (24)
where
△t
is the lag time. The channel temporal coherence reflects the speed of channel
change to a certain extent. In Figure 6, it can be further reflected that, compared with
AUVFest07 calm sea conditions, the channel has higher time variability in AUVFest07 rough
sea conditions and Watermark NCS1, which are more challenging for prediction algorithms.
3.2. Experimental Process
Equation (1) defines the channel model, but in the actual prediction, our prediction
object is the discrete channel h
[n]
in Equation (2), where the parameter
P
represents the
number of taps that need to be predicted; how to determine its value is a key factor in
prediction. In some studies, it is assumed that the channel has a sparse structure [
26
].
At this time,
P
has a small value, and the specific value is determined by the results of
the channel estimation algorithms, such as CS [
77
,
78
] and sparse Bayesian learning [
79
].
Although this assumption holds reasonably well in Figure 5a, it fails in Figure 5b,c, because
their channels are not quasi-static. Therefore, in this paper, we set the number of taps
P
as
the number of sampling points of the channel, so that we can adapt to different channel
structures. In AUVFest07 calm, AUVFest07 rough, and NCS1, the channel is uniformly
sampled in the delay spread, and the values of P are 133, 125, and 510, respectively. As
shown in Figure 5, the three public datasets directly provide a discrete channel matrix, so
we can directly perform the channel preprocessing process in Figure 2, and then perform
channel prediction.
Table 3 lists the algorithms for the channel prediction performance simulation. We set
the parameter
M
to 4 and
N
to 1. The whole channel prediction process is shown in Figure 2,
and the application of various algorithms is described in detail in Section 2. Different from
linear and kernel-based algorithms, LSTM often requires a significant amount of historical
channel samples for training and model optimization. In three channels, the number of
training set channels
N
train
is 20,560, 19,600, and 5940, and the number of testing sets
N
test
is 50. In AUVFest07 calm and rough sea conditions, the channels estimated by the shift
cyclic m-sequences are used to obtain sufficient training samples. In Watermark NCS1,

Remote Sens. 2024, 16, 1546
16 of 24
multiple cycles of channels are used to train the LSTM algorithm. All the algorithms use
the last 50 channel samples to verify the channel prediction performance.
This experiment needs to predict the complex value of the channel. Early studies found
that for the complex value of the channel, predicting the real/imaginary can achieve better
performance than predicting the amplitude/phase, because there is no phase mutation
problem [
80
]. Therefore, the complex value of the channel obtained from the experiment is
predicted separately by the real part and the imaginary part. The processing of the channel
complex value is illustrated in Figure 7.
real part
...
Predictor in Table 3.
Complex-valued predicted channel
imaginary
part
real part
imaginary
part
Complex-valued
multipath channels
()
( 1)......
( 1)
P
P
P
hn
hn
h n M
−
−+
()
( 1)......
( 1)
P
P
P
hn
hn
h n M
−
−+
1
1
1
()
( 1)......
( 1)
hn
hn
h n M
−
−+
1
1
1
()
( 1)......
( 1)
hn
hn
h n M
−
−+
()
( 1)......
( 1)
n
n
nM
−
−+
h
h
h
ˆ
()nN+h
Figure 7. Processing of complex-valued channels.
Table 3. The algorithms for channel prediction performance simulation.
Algorithm Algorithm Classification
Whether the Algorithm Needs
Historical Channel Data to Train
RLS [4] Linear Algorithm No
LMMSE [33] Linear Algorithm No
ES [36] Linear Algorithm No
Kalman filtering [43] Linear Algorithm No
KRLS [56] Kernel-Based Algorithm No
SVR [62] Kernel-Based Algorithm Yes
LSTM [73] Deep Learning Algorithm Yes
Each tap of the channel is predicted separately and then combined together for error
calculation and performance analysis. The NMSE and normalized channel prediction error
are taken as the performance metrics. The NMSE is defined as
NMSE =
∑
N
test
n=1
˜
h[n + N] −
ˆ
h[n + N]
2
∑
N
test
n=1
˜
h[n + N]
2
. (25)

Remote Sens. 2024, 16, 1546
17 of 24
The normalized channel prediction error is defined as
e
nor
[n] =
r
˜
h[n + N] −
ˆ
h[n + N]
2
q
˜
h[n + N]
2
, (26)
where all variables have the same meanings as Table 2.
4. Experimental Results and Analysis
In the comparison experiment of the algorithms, we also consider the use of outdated
channels as an algorithm to participate in the comparison. In the worst case, the system
cannot perform channel prediction and can only rely on the outdated channel at the
previous moment. The channel time-varying caused by the complex marine environment
makes the actual channel and the outdated channel different, resulting in outdated channel
errors. Our ultimate goal is to eliminate this error through channel prediction. Therefore,
by comparing the outdated channel error with the prediction error of each prediction
algorithm, the performance of the channel prediction algorithm can be better reflected.
Table 4 and Figure 8 illustrate the errors defined by Equations (25) and (26), respectively.
Note from Figure 8 that the prediction errors of the linear algorithms are generally higher
than those of the kernel-based algorithms. Additionally, the deep learning algorithm
performs better than all the other algorithms in AUVFest07 rough sea conditions and
Watermark NCS1, but it does not perform well in AUVFest07 calm sea conditions.
0 1 2 3 4 5 6 7
Time(s)
0.2
0.25
0.3
0.35
0.4
0.45
0.5
0.55
0.6
0.65
0.7
e
nor
outdated data
RLS
LMMSE
ES
Kalman
KRLS
SVR
LSTM
(a)
0 1 2 3 4 5 6 7
Time(s)
0.6
0.7
0.8
0.9
1
1.1
1.2
1.3
1.4
1.5
e
nor
outdated data
RLS
LMMSE
ES
Kalman
KRLS
SVR
LSTM
(b)
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6
Time(s)
0.3
0.4
0.5
0.6
0.7
0.8
0.9
e
nor
outdated data
RLS
LMMSE
ES
Kalman
KRLS
SVR
LSTM
(c)
Figure 8. The normalized channel prediction errors defined by Equation (26) for different algorithms.
(a) AUVFest07 calm sea. (b) AUVFest07 rough sea. (c) Watermark NCS1.

Remote Sens. 2024, 16, 1546
18 of 24
Table 4. The NMSE of each algorithm in three channel databases.
Algorithm AUVFest07 Calm AUVFest07 Rough NCS1
Outdated data 0.0995 0.8952 0.4097
RLS 0.0792 0.7190 0.3700
LMMSE 0.0754 0.6312 0.3352
ES 0.0826 0.7992 0.4080
Kalman filtering 0.0811 0.6697 0.3363
KRLS 0.0784 0.6593 0.3496
SVR 0.2640 0.6276 0.3147
LSTM 0.2125 0.6128 0.3054
In theory, the data-fitting ability of the deep learning and kernel-based algorithms
is better than that of linear algorithms. But in calm sea conditions, the performance of
LSTM and SVR is not ideal—both of them need to be trained using historical channel data.
Through research, we discover that the error mainly occurs on several main taps, which
have strong energy. So, we study the real and imaginary parts of the tap carrying the
maximum energy. In Figure 9, we provide the actual value over a time period of channel
observation, as well as the predicted values of the KRLS, SVR, and LSTM algorithms to
explore the reasons for the excessive error.
In AUVFest07 calm sea conditions, the channel observation time is 25 s, of which the
first 18 s channels are used as the training set. In theory, the training set should contain the
complete change trend of the data, so that it can be extracted by the algorithms. However,
in Figure 9a,b, we can observe that the real and imaginary parts fluctuate slowly, and the
observation time of the channel samples is insufficient, resulting in the training set not
containing the complete trend of channel data variations, which leads to a decline in the
prediction performance. We note that this is particularly evident in the prediction of the
imaginary part, where it is difficult for the predicted value to be less than the minimum
value of the training set. Therefore, the lack of completeness of the training set is the key
reason for the decline in prediction performance.
To further support the above conclusion, the trends of the real and imaginary parts of
the tap carrying the maximum energy in AUVFest07 rough sea conditions and Watermark
NCS1 are also presented in Figure 9c–f. It can be seen that at the same observation time, the
channels of AUVFest07 rough and Watermark NCS1 change faster than those of AUVFest07
calm, so that the prediction algorithms can learn the complete change trend of the channel.
At this point, the advantages of algorithms such as deep learning can be found, and their
performance is demonstrated in Table 4. Therefore, it can still be considered that LSTM has
the best performance in channel prediction.
Table 5 lists the computational complexity of the algorithms.
M
is the predictor order,
D
is the size of the KRLS dictionary, and
N
train
is the number of SVR training samples. The
computing complexity of the LSTM layer is
O(
4
n
li
× n
lh
+
4
n
2
lh
+
3
n
lh
+ n
lh
× n
lo
)
, which
we use
O(LSTM)
to represent.
n
li
,
n
lh
, and
n
lo
represent the number of units in the input,
hidden, and output layers, respectively.
Table 5. The computational complexity of each algorithm.
Algorithm RLS LMMSE ES Kalman Filtering KRLS SVR LSTM
Computational
complexity
O(M
2
) O(M
3
)
O(1)
O(M
3
) O(D
2
) O(N
3
train
)
O(LSTM)

Remote Sens. 2024, 16, 1546
19 of 24
0 5 10 15 20 25
Time(s)
!1
!0:8
!0:6
!0:4
!0:2
0
0:2
0:4
0:6
0:8
1
Normalized amplitude
Actual data
KRLS
SVR
LSTM
(a)
0 5 10 15 20 25
Time(s)
!1
!0:8
!0:6
!0:4
!0:2
0
0:2
0:4
0:6
0:8
1
Normalized amplitude
Actual data
KRLS
SVR
LSTM
(b)
0 5 10 15 20 25
Time(s)
!0:6
!0:4
!0:2
0
0:2
0:4
0:6
0:8
Normalized amplitude
Actual data
KRLS
SVR
LSTM
(c)
0 5 10 15 20 25
Time(s)
!0:8
!0:6
!0:4
!0:2
0
0:2
0:4
0:6
0:8
Normalized amplitude
Actual data
KRLS
SVR
LSTM
(d)
0 1 2 3 4 5 6 7 8 9 10
Time(s)
!1
!0:8
!0:6
!0:4
!0:2
0
0:2
0:4
0:6
Normalized amplitude
Actual data
KRLS
SVR
LSTM
(e)
0 1 2 3 4 5 6 7 8 9 10
Time(s)
!1:5
!1
!0:5
0
0:5
1
1:5
Normalized amplitude
Actual data
KRLS
SVR
LSTM
(f)
Figure 9. The actual values and predicted values of the maximum tap of the channel energy in
AUVFest07 calm sea conditions, AUVFest07 rough sea conditions, and Watermark NCS1. (a) Calm
real part. (b) Calm imaginary part. (c) Rough real part. (d) Rough imaginary part. (e) NCS1 real part.
(f) NCS1 imaginary part.
As shown in Table 5, linear algorithms usually require fewer computing resources
than kernel-based algorithms, and the computational complexity of deep learning is the
largest. The computational complexity of RLS, MMSE, and Kalman is related to the order of
the predictor. The computational complexity of KRLS is related to the size of the dictionary
and the computational complexity of SVR is related to the amount of data used for fitting.
If it exceeds a certain value, the computational complexity will become too high. So, when
we have enough channel samples, it is preferable to use the LSTM algorithm to obtain
better prediction performance.

Remote Sens. 2024, 16, 1546
20 of 24
5. Conclusions
From the development of UWA channel prediction, it can be observed that the linear
prediction algorithms are the earliest and most widely used algorithms in UWA channel
prediction. From the perspective of the channel, whether for single-carrier or multi-carrier
communication represented by OFDM, we always predict the channel in the time do-
main rather than the frequency domain. In point-to-point communication, the adaptive
modulation scheme using channel prediction can better adapt to time-varying channels.
In multi-user communication, by utilizing channel prediction, the system can achieve
multi-node resource allocation under favorable channel conditions.
5.1. Discussion
The linear prediction algorithms have low complexity and can be predicted online;
however, the fitting ability of the data is poor and the order of the linear prediction models
is generally fixed before the prediction. When tracking rapidly changing channels, the
algorithms fail to adaptively adjust and the prediction performance is degraded.
Kernel-based algorithms improve the ability to fit data. Among them, the KRLS
algorithm does not require historical channel data for training and can be started quickly.
Even if the SVR algorithm needs to be trained, the quantity of historical channel data and
the training time are much lower than those required for deep learning. These algorithms
provide adaptability to rapidly changing channels.
Deep learning algorithms have the strongest ability to fit data, and can determine
the deep connection between data. They perform well even when the channel changes
rapidly. However, they require the largest historical channel data and training time of all
the algorithms. Moreover, when the environment geometry changes, the previously trained
model may become ineffective, and the new model will require a lot of historical channel
data to retrain. These factors greatly reduce the application of deep learning algorithms in
unknown underwater areas.
Limited by the datasets, we have only compared the prediction performance and
computational complexity of different prediction algorithms in a shallow-water channel. In
the future, we will explore the application of channel prediction in deep-sea environments
and assess the practicability of different algorithms more comprehensively.
5.2. Future Prospects
In most channel prediction research papers, we usually assume that there is no correla-
tion between the channel taps, and algorithms like CS are often used to select the main taps
with concentrated energy for separate prediction. However, in fact, due to the similarity of
sound propagation paths, channel taps often exhibit cross-correlation [24]. The linear and
kernel-based algorithms perform well for time series composed of a single variable, but they
have difficulty explaining the relationships between different channel taps. Deep learning,
with its powerful data-fitting capability, makes it possible to perform joint prediction using
the cross-correlation between multiple taps. However, if we attempt to jointly predict all
taps obtained based on the channel sampling rate, it can lead to several challenges. First, it
would result in a high-dimensional model with an excessive number of training parameters.
Second, the model may forcibly seek relationships between unrelated taps, which will
make the model over-fitting. Therefore, it is reasonable to select the combination of taps for
joint prediction to improve the prediction performance.
In channel prediction, in addition to historical channel data, we also need to utilize
additional prior information. As the key factor affecting the change of channel, the marine
environmental information, such as wind speed, tide, wave height, and current velocity,
can be exploited in channel prediction. At the same time, the periodic variation in the
channel caused by diurnal and seasonal changes should also be considered. The increase
in prior information can reduce the reliance on historical channel data and improve the
performance of the algorithms.

Remote Sens. 2024, 16, 1546
21 of 24
Author Contributions: Conceptualization, H.L. and L.M.; methodology, H.L.; software, H.L.; valida-
tion, H.L.; formal analysis, H.L.; investigation, H.L. and L.M.; resources, L.M. and G.Q.; data curation,
H.L.; writing—original draft preparation, H.L. and L.M.; writing—review and editing, L.M. and Z.W.;
visualization, H.L.; supervision, G.Q.; funding acquisition, L.M. All authors have read and agreed to
the published version of the manuscript.
Funding: This research was funded by the National Natural Science Foundation of China (NSFC)
(Grant No.62271161), the National Key R&D Program of China (Grant No.2023YFC3010800), the Key
Research and Development Program of ShanDong Province (Grant No.2022CXGC020409), and the
Taishan Industry Leading Talents Special Fund.
Data Availability Statement: Watermark channels were obtained from the FFI website www.ffi.no/
watermark, accessed on 21 April 2024.
Acknowledgments: The authors thank T.C.Yang et al. for providing AUVFest07 channel data.
Conflicts of Interest: The authors declare no conflicts of interest.
References
1. Sendra, S.; Lloret, J.; Jimenez, J.M.; Parra, L. Underwater acoustic modems. IEEE Sens. J. 2015, 16, 4063–4071. [CrossRef]
2.
Zia, M.Y.I.; Poncela, J.; Otero, P. State-of-the-art underwater acoustic communication modems: Classifications, analyses and
design challenges. Wirel. Pers. Commun. 2021, 116, 1325–1360. [CrossRef]
3.
Stojanovic, M. Underwater acoustic communications: Design considerations on the physical layer. In Proceedings of the 2008
Fifth Annual Conference on Wireless on Demand Network Systems and Services, Garmisch-Pertenkirchen, Germany, 23–25
January 2008; IEEE: Piscataway, NJ, USA, 2008; pp. 1–10.
4.
Radosevic, A.; Duman, T.M.; Proakis, J.G.; Stojanovic, M. Channel prediction for adaptive modulation in underwater acoustic
communications. In Proceedings of the OCEANS 2011 IEEE-Spain, Santander, Spain, 6–9 June 2011; pp. 1–5.
5.
Rice, J.A.; Mcdonald, V.K.; Green, D.; Porta, D. Adaptive modulation for undersea acoustic telemetry. Sea Technol. 1999, 40, 29–36.
6.
Benson, A.; Proakis, J.; Stojanovic, M. Towards robust adaptive acoustic communications. In Proceedings of the OCEANS
2000 MTS/IEEE Conference and Exhibition. Conference Proceedings, Providence, RI, USA, 11–14 September 2000; Volume 2,
pp. 1243–1249.
7.
Mani, S.; Duman, T.M.; Hursky, P. Adaptive coding-modulation for shallow-water UWA communications. J. Acoust. Soc. Am.
2008, 123, 3749. [CrossRef]
8.
Tomasi, B.; Toni, L.; Casari, P.; Rossi, L.; Zorzi, M. Performance study of variable-rate modulation for underwater communications
based on experimental data. In Proceedings of the OCEANS 2010 MTS/IEEE SEATTLE, Seattle, WA, USA, 20–23 September 2010;
pp. 1–8.
9.
Qarabaqi, P.; Stojanovic, M. Adaptive power control for underwater acoustic communications. In Proceedings of the OCEANS
2011 IEEE-Spain, Santander, Spain, 6–9 June 2011; pp. 1–7.
10.
Pelekanakis, K.; Cazzanti, L. On adaptive modulation for low SNR underwater acoustic communications. In Proceedings of the
OCEANS 2018 MTS/IEEE Charleston, Charleston, SC, USA, 22–25 October 2018; pp. 1–6.
11.
Huda, M.; Putri, N.B.; Santoso, T.B. OFDM system with adaptive modulation for shallow water acoustic channel environment. In
Proceedings of the 2017 IEEE International Conference on Communication, Networks and Satellite, Semarang, Indonesia, 5–7
October 2017; pp. 55–58.
12.
Barua, S.; Rong, Y.; Nordholm, S.; Chen, P. Adaptive modulation for underwater acoustic OFDM communication. In Proceedings
of the OCEANS 2019-Marseille, Marseille, France, 17–20 June 2019; pp. 1–5.
13.
Zhang, R.; Ma, X.; Wang, D.; Yuan, F.; Cheng, E. Adaptive coding and bit-power loading algorithms for underwater acoustic
transmissions. IEEE Trans. Wirel. Commun. 2021, 20, 5798–5811. [CrossRef]
14.
Qiao, G.; Liu, L.; Ma, L.; Yin, Y. Adaptive downlink OFDMA system with low-overhead and limited feedback in time-varying
underwater acoustic channel. IEEE Access 2019, 7, 12729–12741. [CrossRef]
15.
Radosevic, A.; Duman, T.M.; Proakis, J.G.; Stojanovic, M. Adaptive OFDM for underwater acoustic channels with limited
feedback. In Proceedings of the 2011 Conference Record of the Forty Fifth Asilomar Conference on Signals, Systems and
Computers (ASILOMAR), Pacific Grove, CA, USA, 6–9 November 2011; pp. 975–980.
16.
Cheng, X.; Yang, L.; Cheng, X. Adaptive relay-aided OFDM underwater acoustic communications. In Proceedings of the 2015
IEEE International Conference on Communications (ICC), London, UK, 8–12 June 2015; pp. 1535–1540.
17.
Liu, Y.; Blostein, S.D. Identification of frequency non-selective fading channels using decision feedback and adaptive linear
prediction. IEEE Trans. Commun. 1995, 43, 1484–1492.
18.
Duel-Hallen, A. Fading channel prediction for mobile radio adaptive transmission systems. Proc. IEEE 2007, 95, 2299–2313.
[CrossRef]
19.
Schafhuber, D.; Matz, G. MMSE and adaptive prediction of time-varying channels for OFDM systems. IEEE Trans. Wirel. Commun.
2005, 4, 593–602. [CrossRef]

Remote Sens. 2024, 16, 1546
22 of 24
20.
Falahati, S.; Svensson, A.; Ekman, T.; Sternad, M. Adaptive modulation systems for predicted wireless channels. IEEE Trans.
Commun. 2004, 52, 307–316. [CrossRef]
21.
Oien, G.; Holm, H.; Hole, K.J. Impact of channel prediction on adaptive coded modulation performance in Rayleigh fading. IEEE
Trans. Veh. Technol. 2004, 53, 758–769. [CrossRef]
22.
Ding, T.; Hirose, A. Fading channel prediction based on combination of complex-valued neural networks and chirp Z-transform.
IEEE Trans. Neural Netw. Learn. Syst. 2014, 25, 1686–1695. [CrossRef]
23.
Luo, C.; Ji, J.; Wang, Q.; Chen, X.; Li, P. Channel state information prediction for 5G wireless communications: A deep learning
approach. IEEE Trans. Netw. Sci. Eng. 2018, 7, 227–236. [CrossRef]
24.
Huang, S.; Yang, T.; Huang, C.F. Multipath correlations in underwater acoustic communication channels. J. Acoust. Soc. Am. 2013,
133, 2180–2190. [CrossRef] [PubMed]
25.
van Walree, P.A.; Socheleau, F.X.; Otnes, R.; Jenserud, T. The watermark benchmark for underwater acoustic modulation schemes.
IEEE J. Ocean. Eng. 2017, 42, 1007–1018. [CrossRef]
26.
Radosevic, A.; Ahmed, R.; Duman, T.M.; Proakis, J.G.; Stojanovic, M. Adaptive OFDM modulation for underwater acoustic
communications: Design considerations and experimental results. IEEE J. Ocean. Eng. 2013, 39, 357–370. [CrossRef]
27.
Ma, L.; Xiao, F.; Li, M. Research on time-varying sparse channel prediction algorithm in underwater acoustic channels. In
Proceedings of the 2019 3rd International Conference on Electronic Information Technology and Computer Engineering (EITCE),
Xiamen, China, 18–20 October 2019; pp. 2014–2018.
28.
Lin, N.; Sun, H.; Cheng, E.; Qi, J.; Kuai, X.; Yan, J. Prediction based sparse channel estimation for underwater acoustic OFDM.
Appl. Acoust. 2015, 96, 94–100. [CrossRef]
29.
Cheng, E.; Lin, N.; Sun, H.; Yan, J.; Qi, J. Precoding based channel prediction for underwater acoustic OFDM. China Ocean. Eng.
2017, 31, 256–260. [CrossRef]
30.
Zhang, Y.; Venkatesan, R.; Dobre, O.A.; Li, C. Efficient estimation and prediction for sparse time-varying underwater acoustic
channels. IEEE J. Ocean. Eng. 2019, 45, 1112–1125. [CrossRef]
31.
Sun, W.; Wang, Z. Modeling and prediction of large-scale temporal variation in underwater acoustic channels. In Proceedings of
the OCEANS 2016-Shanghai, Shanghai, China, 10–13 April 2016; pp. 1–6.
32.
Aval, Y.M.; Wilson, S.K.; Stojanovic, M. On the achievable rate of a class of acoustic channels and practical power allocation
strategies for OFDM systems. IEEE J. Ocean. Eng. 2015, 40, 785–795. [CrossRef]
33.
Kuai, X.; Sun, H.; Qi, J.; Cheng, E.; Xu, X.; Guo, Y.; Chen, Y. CSI feedback-based CS for underwater acoustic adaptive modulation
OFDM system with channel prediction. China Ocean. Eng. 2014, 28, 391–400. [CrossRef]
34. Brown, R.G.; Meyer, R.F. The fundamental theorem of exponential smoothing. Oper. Res. 1961, 9, 673–685. [CrossRef]
35.
Wang, Z.; Wang, C.; Sun, W. Adaptive transmission scheduling in time-varying underwater acoustic channels. In Proceedings of
the OCEANS 2015-MTS/IEEE Washington, Washington, DC, USA, 19–22 October 2015; pp. 1–6.
36.
Li, Y.; Li, B.; Zhang, Y. A channel state information feedback and prediction scheme for time-varying underwater acoustic
channels. In Proceedings of the 2018 International Conference on Intelligent Transportation, Big Data & Smart City (ICITBS),
Xiamen, China, 25–26 January 2018; pp. 141–144.
37.
Iltis, R.A. A sparse Kalman filter with application to acoustic communications channel estimation. In Proceedings of the OCEANS
2006, Boston, MA, USA, 18–22 September 2006; pp. 1–5.
38.
Tao, J.; Wu, Y.; Wu, Q.; Han, X. Kalman filter based equalization for underwater acoustic communications. In Proceedings of the
OCEANS 2019-Marseille, Marseille, France, 17–20 June 2019; pp. 1–5.
39.
Huang, Q.; Li, W.; Zhan, W.; Wang, Y.; Guo, R. Dynamic underwater acoustic channel tracking for correlated rapidly time-varying
channels. IEEE Access 2021, 9, 50485–50495. [CrossRef]
40.
Huang, S.H.; Tsao, J.; Yang, T.; Cheng, S.W. Model-based signal subspace channel tracking for correlated underwater acoustic
communication channels. IEEE J. Ocean. Eng. 2013, 39, 343–356. [CrossRef]
41.
Huang, S.; Yang, T.; Tsao, J. Improving channel estimation for rapidly time-varying correlated underwater acoustic channels by
tracking the signal subspace. Ad Hoc Netw. 2015, 34, 17–30. [CrossRef]
42.
Yang, G.; Yin, J.; Huang, D.; Jin, L.; Zhou, H. A Kalman filter-based blind adaptive multi-user detection algorithm for underwater
acoustic networks. IEEE Sens. J. 2015, 16, 4023–4033. [CrossRef]
43.
Petroni, A.; Scarano, G.; Cusani, R.; Biagi, M. On the Effect of Channel Knowledge in Underwater Acoustic Communications:
Estimation, Prediction and Protocol. Electronics 2023, 12, 1552. [CrossRef]
44.
Schölkopf, B.; Smola, A.J. Learning with Kernels: Support Vector Machines, Regularization, Optimization, and Beyond; MIT Press:
Cambridge, MA, USA, 2002.
45.
Cristianini, N.; Shawe-Taylor, J. An Introduction to Support Vector Machines and Other Kernel-Based Learning Methods; Cambridge
University Press: Cambridge, UK, 2000.
46.
Liu, W.; Pokharel, P.P.; Principe, J.C. The kernel least-mean-square algorithm. IEEE Trans. Signal Process. 2008, 56, 543–554.
[CrossRef]
47.
Engel, Y.; Mannor, S.; Meir, R. The kernel recursive least-squares algorithm. IEEE Trans. Signal Process. 2004, 52, 2275–2285.
[CrossRef]
48. Liu, W.; Príncipe, J.C. Kernel affine projection algorithms. EURASIP J. Adv. Signal Process. 2008, 2008, 784292. [CrossRef]

Remote Sens. 2024, 16, 1546
23 of 24
49.
Van Vaerenbergh, S.; Santamaría, I. A comparative study of kernel adaptive filtering algorithms. In Proceedings of the 2013 IEEE
Digital Signal Processing and Signal Processing Education Meeting (DSP/SPE), Napa, CA, USA, 11–14 August 2013; pp. 181–186.
50.
Van Vaerenbergh, S.; Via, J.; Santamaría, I. A sliding-window kernel RLS algorithm and its application to nonlinear channel
identification. In Proceedings of the 2006 IEEE International Conference on Acoustics Speech and Signal Processing Proceedings,
Toulouse, France, 14–19 May 2006; Volume 5, pp. V–V.
51.
Van Vaerenbergh, S.; Santamaría, I.; Liu, W.; Príncipe, J.C. Fixed-budget kernel recursive least-squares. In Proceedings of the 2010
IEEE International Conference on Acoustics, Speech and Signal Processing, Dallas, TX, USA, 14–19 March 2010; pp. 1882–1885.
52.
Ma, W.; Duan, J.; Man, W.; Zhao, H.; Chen, B. Robust kernel adaptive filters based on mean p-power error for noisy chaotic time
series prediction. Eng. Appl. Artif. Intell. 2017, 58, 101–110. [CrossRef]
53.
Shi, L.; Tan, J.; Wang, J.; Li, Q.; Lu, L.; Chen, B. Robust kernel adaptive filtering for nonlinear time series prediction. Signal Process.
2023, 210, 109090. [CrossRef]
54.
Shi, L.; Lu, R.; Liu, Z.; Yin, J.; Chen, Y.; Wang, J.; Lu, L. An Improved Robust Kernel Adaptive Filtering Method for Time Series
Prediction. IEEE Sens. J. 2023. [CrossRef]
55.
Ai, X.; Zhao, J.; Zhang, H.; Sun, Y. Sparse Sliding-Window Kernel Recursive Least-Squares Channel Prediction for Fast
Time-Varying MIMO Systems. Sensors 2022, 22, 6248. [CrossRef] [PubMed]
56.
Liu, L.; Cai, L.; Ma, L.; Qiao, G. Channel state information prediction for adaptive underwater acoustic downlink OFDMA system:
Deep neural networks based approach. IEEE Trans. Veh. Technol. 2021, 70, 9063–9076. [CrossRef]
57.
Liu, L.; Ma, C.; Duan, Y. Channel temporal correlation-based optimization method for imperfect underwater acoustic channel
state information. Phys. Commun. 2023, 58, 102021. [CrossRef]
58. Vapnik, V. The Nature of Statistical Learning Theory; Springer Science & Business Media: Berlin/Heidelberg, Germany, 1999.
59.
Xinhua, Z.; Zhenbo, L.; Chunyu, K. Underwater acoustic targets classification using support vector machine. In Proceedings of
the International Conference on Neural Networks and Signal Processing, 2003, Nanjing, China, 14–17 December 2003; Volume 2,
pp. 932–935.
60.
Zhang, G.; Yang, L.; Chen, L.; Zhao, B.; Li, Y.; Wei, W. Blind equalization algorithm for underwater acoustic channel based on
support vector regression. In Proceedings of the 2019 11th International Conference on Intelligent Human-Machine Systems and
Cybernetics (IHMSC), Hangzhou, China, 24–25 August 2019; Volume 2, pp. 163–166.
61.
Sapankevych, N.I.; Sankar, R. Time series prediction using support vector machines: A survey. IEEE Comput. Intell. Mag. 2009,
4, 24–38. [CrossRef]
62.
Huang, J.; Diamant, R. Adaptive modulation for long-range underwater acoustic communication. IEEE Trans. Wirel. Commun.
2020, 19, 6844–6857. [CrossRef]
63.
Bengio, Y.; Courville, A.; Vincent, P. Representation learning: A review and new perspectives. IEEE Trans. Pattern Anal. Mach.
Intell. 2013, 35, 1798–1828. [CrossRef]
64.
Lim, B.; Zohren, S. Time-series forecasting with deep learning: A survey. Philos. Trans. R. Soc. A 2021, 379, 20200209. [CrossRef]
65.
Borovykh, A.; Bohte, S.; Oosterlee, C.W. Conditional time series forecasting with convolutional neural networks. arXiv 2017,
arXiv:1703.04691.
66.
Lim, B.; Zohren, S.; Roberts, S. Recurrent neural filters: Learning independent bayesian filtering steps for time series prediction.
In Proceedings of the 2020 International Joint Conference on Neural Networks (IJCNN), Glasgow, UK, 19–24 July 2020; pp. 1–8.
67.
Jiang, W.; Schotten, H.D. Neural network-based fading channel prediction: A comprehensive overview. IEEE Access 2019,
7, 118112–118124. [CrossRef]
68. Jiang, W.; Schotten, H.D. Deep learning for fading channel prediction. IEEE Open J. Commun. Soc. 2020, 1, 320–332. [CrossRef]
69.
Jiang, W.; Schotten, H.D. Recurrent neural networks with long short-term memory for fading channel prediction. In Proceedings
of the 2020 IEEE 91st Vehicular Technology Conference (VTC2020-Spring), Antwerp, Belgium, 25–28 May 2020; pp. 1–5.
70.
Wang, X.; Jiao, J.; Yin, J.; Zhao, W.; Han, X.; Sun, B. Underwater sonar image classification using adaptive weights convolutional
neural network. Appl. Acoust. 2019, 146, 145–154. [CrossRef]
71.
Lucas, E.; Wang, Z. Performance prediction of underwater acoustic communications based on channel impulse responses. Appl.
Sci. 2022, 12, 1086. [CrossRef]
72.
Zhang, Y.; Zhu, J.; Liu, Y.; Wang, B. Underwater Acoustic Adaptive Modulation with Reinforcement Learning and Channel
Prediction. In Proceedings of the 15th International Conference on Underwater Networks & Systems, Shenzhen, China, 22–24
November 2021; pp. 1–2.
73.
Zhu, Z.; Tong, F.; Zhou, Y.; Zhang, Z.; Zhang, F. Deep Learning Prediction of Time-Varying Underwater Acoustic Channel Based
on LSTM with Attention Mechanism. J. Mar. Sci. Appl. 2023, 22, 650–658. [CrossRef]
74.
Yang, T. Properties of underwater acoustic communication channels in shallow water. J. Acoust. Soc. Am. 2012, 131, 129–145.
[CrossRef]
75.
van Walree, P.; Otnes, R.; Jenserud, T. Watermark: A realistic benchmark for underwater acoustic modems. In Proceedings of the
2016 IEEE Third Underwater Communications and Networking Conference (UComms), Lerici, Italy, 30 August–1 September
2016; pp. 1–4.
76.
Yang, T. Measurements of temporal coherence of sound transmissions through shallow water. J. Acoust. Soc. Am. 2006,
120, 2595–2614. [CrossRef]

Remote Sens. 2024, 16, 1546
24 of 24
77.
Berger, C.R.; Wang, Z.; Huang, J.; Zhou, S. Application of compressive sensing to sparse channel estimation. IEEE Commun. Mag.
2010, 48, 164–174. [CrossRef]
78.
Bajwa, W.U.; Haupt, J.; Sayeed, A.M.; Nowak, R. Compressed channel sensing: A new approach to estimating sparse multipath
channels. Proc. IEEE 2010, 98, 1058–1076. [CrossRef]
79.
Qiao, G.; Song, Q.; Ma, L.; Sun, Z.; Zhang, J. Channel prediction based temporal multiple sparse bayesian learning for channel
estimation in fast time-varying underwater acoustic OFDM communications. Signal Process. 2020, 175, 107668. [CrossRef]
80.
Yang, Q.; Mashhadi, M.B.; Gündüz, D. Deep convolutional compression for massive MIMO CSI feedback. In Proceedings of the
2019 IEEE 29th international workshop on machine learning for signal processing (MLSP), Pittsburgh, PA, USA, 13–16 October
2019; pp. 1–6.
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual
author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to
people or property resulting from any ideas, methods, instructions or products referred to in the content.
